
|
|
Технологические грузоподъемные машины.Стр 1 из 2Следующая ⇒ Технологические грузоподъемные машины. Под технологическими грузоподъемными машинами (технологическими ГПМ) – будем понимать грузоподъемные машины, используемые в технологическом процессе машиностроительного производства. Обзор конструкций грузоподъемных машин. Различают две группы грузоподъемных машин: машины с гибким подвесом груза и машины с жестким захватом груза. Грузоподъемные машины с гибким подвесом груза. Достоинства. 1. Возможность подъема груза на очень большую высоту. 2. В качестве гибкого грузового элемента применяют стальные проволочные канаты. Канат, являясь упругим элементом, смягчает толчки нагрузки. 3. Механизм подъема груза можно комплектовать, в значительной мере, из стандартных и нормализованных элементов. Недостатки. 1. Необходимость такелажных операций (зачаливание и расчаливание груза). 2. При горизонтальном перемещении груз раскачивается на канате, следовательно, необходимы увеличение времени разгона и торможения и снижение скорости перемещения. Отмеченные недостатки снижают производительность. Тали Тали – компактные лебедки с ручным или электрическим (электротали) приводом. Тали бывают стационарные или перемещающиеся на тележке по подвесной двутавровой балке. Тали используют в качестве самостоятельных ГПМ или как элемент более сложной машины, например, кран-балки. На рис.1.1, а представлен один из вариантов конструкции тали,
а на рис. 1.1, б - внешний вид тали.
а) б) Рис.1.1. От электродвигателя 1 вращение передают через муфту 2 на быстроходный вал 4 зубчатого цилиндрического двухступенчатого соосного редуктора и далее через две пары зубчатых колес 15,10 и 8,9 на канатный барабан 13. Барабан 13 установлен в корпусе 5 тали на двух радиальных подшипниках 3 и 6. При вращении барабана в ту или иную сторону канат 12 наматывается на барабан и поднимает крюковую подвеску 7 или сматывается с барабана и опускает подвеску. На правом конце вала 4 установлен дисковый тормоз 11. Таль подвешена к тележке 16, которая на колесах 14 перемещается по подвесной двутавровой балке17. Стационарные поворотные краны. Настенные поворотные краны. Краны бывают с постоянным и переменным вылетом, с металлоконструкцией ферменного и балочного типа. Поворот крана- обычно ручной. На рис. 1.2 представлен настенный поворотный кран с постоянным вылетом и с металлоконструкцией ферменного типа.
Рис.1.2.1–упорный подшипник;2,4– радиальные подшипники;3-металлоконструкция 5– колонна крана; 6 – механизм подъема; 7 – канат; 8– отклоняющий блок; 9 – крюковая подвеска; 10– рукоятка для поворота крана. Колонна 5 крана установлена в двух опорах. Нижняя опора - комбинированная с радиальным 2 и упорным 1 подшипниками, а верхняя опора - плавающая с радиальным подшипником 4. В опорах поворотных кранов применяют обычно самоустанавливающиеся подшипники, способные компенсировать несоосность и взаимные перекосы осей посадочных отверстий в корпусах опор. На рис.1.3 представлен настенный поворотный кран с металлоконструкцией балочного типа и с переменным вылетом. По стреле металлоконструкции 1 перемещается таль 2.
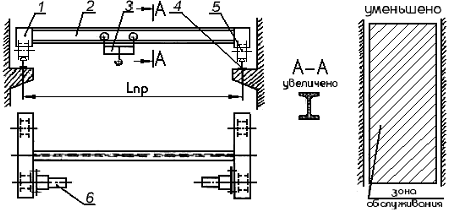
Рис.1.3. Однобалочные краны с электроталью (кран– балки). Схема кран-балки представлена на рис. 1.6.
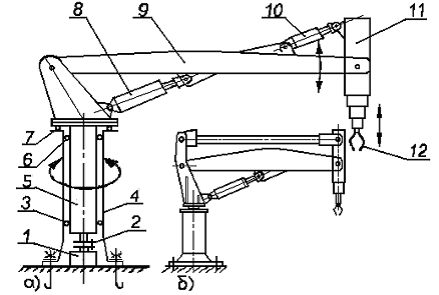
Рис. 1.6. Главная балка 2 (двутавр) сварена с двумя концевыми балками 1. По главной балке перемещается электроталь 3. Сам кран перемещается вдоль цеха на колесах 5 по рельсам 4. Зона обслуживания – прямоугольник, вытянутый вдоль цеха. Электрические мостовые краны. Электрические мостовые краны обладают большей грузоподъемностью, имеют больший пролет, но более сложную конструкцию, чем кран-балки. В современных конструкциях обычно выполняют одну главную балку коробчатого сечения. На главной балке уложены рельсы, по которым перемещается тележка, несущая механизм подъема груза. Мостовые краны в качестве технологических грузоподъемных машин применяют редко. Грузоподъемные машины с жестким захватом груза. Достоинства. 1. Отсутствие такелажных операций, т.к. груз захватывают специальным схватом, а оператор управляет машиной с пульта. 2. При горизонтальном перемещении груз не раскачивается. Отмеченные достоинства повышают производительность. На рис.1.7,а представлен поворотный гидравлический кран. В неподвижной колонне 4 установлена вращающаяся колонна 5. Верхняя опора колонны 5 выполнена комбинированной с радиальным 6 и упорным 7 подшипниками, а нижняя опора - плавающей с радиальным подшипником 3. Возможен вариант верхней опоры с одним радиально-упорным подшипником.
Рис.1.7. От гидродвигателя 1 вращение передают через муфту 2 колонне 5. Качание стрелы 9 осуществляет гидроцилиндр 8, захват груза – схват 12, а вертикальное перемещение груза – телескопический гидроцилиндр 11. При качании стрелы 9 гидроцилиндр 11 отклоняется от вертикального положения. Для устранения этого недостатка применяют вспомогательный гидроцилиндр 10, работа которого согласована с работой гидроцилиндра 8 таким образом, что гидроцилиндр 11 всегда находится в вертикальном положении. Вертикальное положение гидроцилиндра 11 можно обеспечить, выполнив стрелу 9 в виде пантографа (рис. 1.7, б). На рис.1.8 представлен передвижной гидравлический кран. Главная балка 1 коробчатого сечения сварена с двумя концевыми балками 2. По главной балке на трех парах катков 3, 6 и 7 перемещается каретка 4. Вертикальное перемещение груза осуществляет телескопический гидроцилиндр 5. Сам кран перемещается вдоль цеха на колесах 9 по рельсам 8.
Рис.1.8.
Скорости перемещения. 2.1. Скорость вертикального перемещения груза – 25 … 30 м/мин. 2.2. Скорость перемещения моста крана - 100 … 120 м/мин. 2.3. Скорость перемещения тележки по мосту крана - 35…50 м/мин. 2.4. Частота вращения крана nкр £ 3 мин-1; при этом окружная скорость конца стрелы не должна превышать 5 … 6 м/с. 3. Вылет стрелы крана L– наибольшее расстояние от оси вращения крана до центра зева крюка, м (рис.1.2,1.5).
4. Высота подъема груза H – наибольшее расстояние от пола цеха до центра зева крюка, м (рис.1.4,1.5).
5. Пролет крана Lпр– расстояние между осями рельсов кранового пути,м (рис.1.6). Таблица 2.1. Классы использования механизмов.
Коэффициент нагружения для механизма
где ti – время работы механизма за весь срок службы под нагрузкой Fi (в часах); здесь под F понимают обобщенный силовой фактор - силу или момент; Fmax – максимальная сила (момент), действующая на механизм. Значения Fi и Fmax определяют для конечного (выходного) звена кинематической цепи механизма (канатный барабан, ходовое колесо, шестерня открытой зубчатой передачи в механизме поворота) с учетом перегрузок при неустановившемся движении. В зависимости от коэффициента нагружения К различают четыре класса нагружения механизмов, которые обозначают В 1, В 2, В 3, В 4 (табл.2.2). Таблица 2.2. Классы нагружения механизмов.
В зависимости от сочетания класса использования А и класса нагружения В ГОСТ 25835-83 устанавливает 6 групп режима работы механизмов, которые обозначают 1 М, 2 М, 3 М, 4 М, 5 М, 6 М (табл.2.3). Таблица 2.3. Группы режима работы механизмов.
Группы режима работы (1М, …, 6М) различных механизмов в одной и той же ГПМ могут быть не одинаковыми. В зависимости от группы режима работы (1М, …, 6М) определяют: 1) нагрузки для расчета механизма, а также нагрузки от механизма на металлоконструкцию; 2) основные нормативные данные, коэффициенты запаса прочности и запаса торможения, сроки службы отдельных деталей и узлов механизма. Рассмотрим теперь грузоподъемную машину в целом. Интенсивность использование ГПМ характеризуют числом циклов работы за весь срок службы. Число циклов за час
где tц, c – продолжительность одного цикла работы. Тогда число циклов за весь срок службы
В зависимости от ZS различают 10 классов использования ГПМ, которые обозначают С 0, С 1, С 2, С 3, С 4, С 5, С 6, С 7, С 8, С 9 (табл.2.4). Таблица 2.4. Классы использования кранов.
Коэффициент нагружения для ГПМ в целом
где Zi - число циклов работы за весь срок службы с грузом массой Qi. В зависимости от коэффициента нагружения Кр различают 5 классов нагружения ГПМ, которые обозначают Q 0, Q 1, Q 2, Q 3, Q 4 (табл. 2.5). Таблица 2.5. Классы нагружения кранов.
В зависимости от сочетания класса использования С и класса нагружения Q ГОСТ 25546-82 устанавливает 8 групп режима работы ГПМ, которые обозначают 1 К, 2 К, 3 К, 4 К, 5 К, 6 К, 7 К, 8 К (табл.2.6 ). Таблица 2.6. Группы режима работы кранов.
Группу режима работы ГПМ (1K, …, 8K) учитывают при расчете ее металлоконструкции. Расчетные нагрузки. Так как ГПМ работают с грузами не одинаковой массы, то расчет на сопротивление усталости деталей и узлов механизмов ведут по эквивалентной нагрузке
где
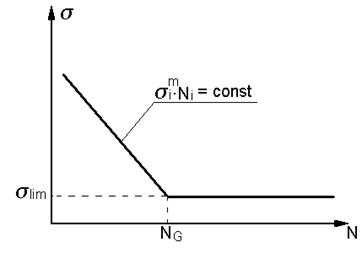
где Ni – число циклов работы за весь срок службы под нагрузкой Fi; m – показатель степени наклонного участка кривой усталости; NG – базовое число циклов – число циклов, соответствующее точке перелома на кривой усталости (рис.2.2).
Рис 2.2 §4. Производительность грузоподъемных машин QЧ, т/ч. 1. При работе с грузами одинаковой массы Qгр
2. При работе с грузами не одинаковой массы
где
Технологические грузоподъемные машины. Под технологическими грузоподъемными машинами (технологическими ГПМ) – будем понимать грузоподъемные машины, используемые в технологическом процессе машиностроительного производства.   Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|





 ,
, ,
, .
. ,
, ,
, - коэффициент эквивалентности на основе линейной гипотезы суммирования усталостных повреждений.
- коэффициент эквивалентности на основе линейной гипотезы суммирования усталостных повреждений. ,
,
 .
. ,
, - число циклов работы за один час с грузами массой Qгр.i.
- число циклов работы за один час с грузами массой Qгр.i.