
|
|
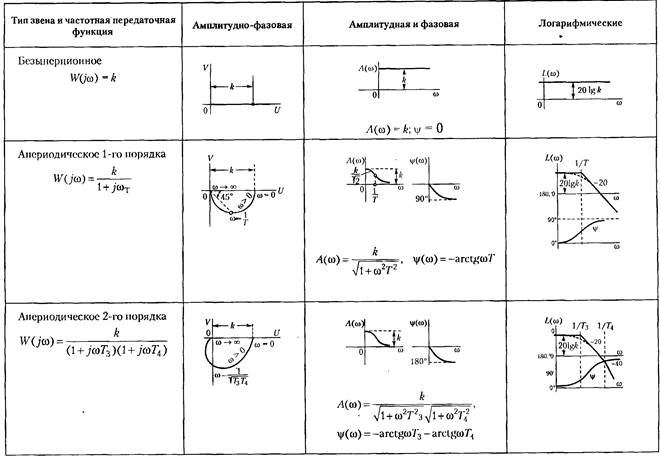
Амплитудно-фазовая характеристика (годограф Найквиста)Это геометрическое место точек, которые описывает конец вектора частотной передаточной функции, при изменении частоты от -∞ до +∞. Величина отрезка от начала координат до каждой точки годографа показывает во сколько раз на данной частоте выходной сигнал больше входного, а сдвиг фазы между сигналами определяется углом до упомянутого отрезка. От АФХ порождаются все другие частотные зависимости:
Логарифмические частотные характеристики. Логарифмические частотные характеристики (ЛЧХ) включают в себя построенные отдельно на одной плоскости логарифмическую амплитудную характеристику (ЛАЧХ) и логарифмическую фазовую характеристику (ЛФЧХ). Построение ЛАЧХ & ЛФЧХ производится по выражениям: L (w) = 20 lg | W (j w)| = 20 lg A (w), [дБ]; j(w) = arg(W (j w)), [рад]. Величина L (w) выражается в децибелах. Бел представляет собой логарифмическую единицу, соответствующую десятикратному увеличению мощности. Один Бел соответствует увеличению мощности в 10 раз, 2 Бела – в 100 раз, 3 Бела – в 1000 раз и т.д. Децибел равен одной десятой части Бела. Примеры АФЧХ, АЧХ, ФЧХ, ЛАЧХ и ЛФЧХ для типовых динамических звеньев приведены в таблице 2.
Таблица 2. Частотные характеристики типовых динамических звеньев.
Принципы автоматического регулирования По принципу управления САУ можно разбить на три группы:
Принцип управления по внешнему возмущению
Достоинства:
Недостатки:
Принцип управления по отклонению
Достоинства:
Недостатки:
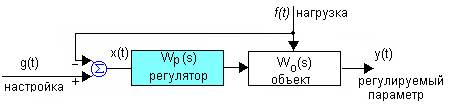
Комбинированное управление заключено в сочетании двух принципов управления по отклонению и внешнему возмущению. Т.е. сигнал управления на объект формируется двумя каналами. Первый канал чувствителен к отклонению регулируемой величины от задания. Второй формирует управляющее воздействие непосредственно из задающего или возмущающего сигнала. x (t) = g (t) - f (t) - y (t) Woc (t) Достоинства:
Недостатки:
Анализ устойчивости САР Понятие устойчивости системы регулирования связано с ее способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Устойчивость является одним из главных требований, предъявляемых к автоматическим системам. Понятие устойчивости можно распространить и на случай движения САР:
Движение любой СУ описывается с помощью дифференциального уравнения, которое в общем случае описывает 2 режима работы системы: - режим установившегося состояния - режим движения При этом общее решение в любой системе можно записать в виде:
Вынужденная составляющая определяется входным воздействием на вход СУ. Этого состояния система достигает по окончании переходных процессов.
Коэффициенты a0,a1,…an включают в себя параметры системы => изменение любого коэффициента дифференциального уравнения приводит к изменению целого ряда параметров системы. Решение однородного дифференциального уравнения
где постоянные интегрирования, а – корни характеристического уравнения следующего вида:
Характеристическое уравнение представляет собой знаменатель передаточной функции приравненный к нулю. Корни характеристического уравнения могут быть вещественными, комплексно-сопряженными и комплексными, что определяется параметрами системы. Чтобы оценивать устойчивость систем, разработан ряд критериев устойчивости Все критерии устойчивости делятся на 3 группы: - корневые - - частотные   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|



 В структуре обязательны датчики возмущения. Система описывается передаточной функцией разомкнутой системы: x (t) = g (t) - f (t).
В структуре обязательны датчики возмущения. Система описывается передаточной функцией разомкнутой системы: x (t) = g (t) - f (t). Система описывается передаточной функцией разомкнутой системы и уравнением замыкания: x (t) = g (t) - y (t) W oc(t). Алгоритм работы системы заключен в стремлении свести ошибку x (t) к нулю.
Система описывается передаточной функцией разомкнутой системы и уравнением замыкания: x (t) = g (t) - y (t) W oc(t). Алгоритм работы системы заключен в стремлении свести ошибку x (t) к нулю. Комбинированное управление
Комбинированное управление
 Переходная составляющая определяется решением однородного дифференциального уравнения вида:
Переходная составляющая определяется решением однородного дифференциального уравнения вида:



 алгебраические
алгебраические