|
|
Общие сведения о глобальных спутниковых радионавигационных системах.Стр 1 из 4Следующая ⇒ Содержание Введение 3 1 Общие сведения о глобальных спутниковых 5 радионавигационных системах 1.1 Принцип действия СРНС 5 1.2 Описание современных спутниковых радионавигационных систем 6 1.3 Задачи и области применения спутниковых радионавигационных систем. 11 2 Обобщённая структурная схема СРНС 13 2.1 Принципы построения СРНС 13 2.2 Подсистема космических аппаратов 14 2.3 Наземный командно-измерительный комплекс 15 2.4 Навигационная аппаратура потребителей СРНС 15 2.5 Взаимодействие подсистем СРНС. 16 3 Определение местоположения пользователя в геоцентрической системе координат. 18 3.1 Опорные системы координат 18 3.2 Системы местоопределения 21 3.3 Краткий обзор существующих методов определения координат 22 4. Тактико-технические данные системы Navstar. 23 4.1 Общие сведения о системе. 23 4.2 Система координат 24 4.3. Состав системы Navstar GPS. 25 4.4. Кодирование навигационных сигналов. 26 5. Совмещённый режим работы систем. 30 5.1 Условия для совместной работы. 30 5.2 Будущее космической навигации. 31 5.3 Приемники Navstar GPS /ГЛОНАСC. 32 5.4 Расчет координат. 34
Список используемой литературы 37 Введение
Успешное освоение человечеством воздушно-космического пространства определило развитие нового направления древнейшей науки навигации – воздушной навигации. Первоначальный смысл латинского слова navigatio – плыву на судне (другой вариант перевода - мореплавание). В наше время это понятие приобрело новое содержание, включающее плавание в воздушном океане и даже в космическом пространстве. Современное разнообразие транспортных средств не меняет сути решаемой навигационной задачи: для любого движущегося объекта необходимо определить такой путь движения, который бы обеспечивал наилучшие показатели качества. После определения заданного пути следует осуществлять оценку степени близости реальной траектории и той, которая была определена как наилучшая. Чтобы оценить величину ошибки, необходимо, в свою очередь, определить место положения движущегося объекта в той же системе координат, в которой определен заданный путь. По величине отклонения текущих координат объекта от рассчитанных ранее формируется вектор управляющих воздействий, направленный на устранение рассогласования. Термин «навигация» традиционно не применяется к вождению объектов, траектории, движения которых заранее жестко определены и положение которых в любой момент времени известно, например железнодорожных составов. Основой успешного самолетовождения является комплексное применение технических средств, которое заключается в том, что самолетовождение осуществляется с помощью не одного какого-либо средства, а нескольких. При этом результаты навигационных определений, полученные с помощью одних средств, уточняются с помощью других средств. Такое дублирование исключает возможность допущения грубых ошибок, повышает точность и надежность самолетовождения. Спутниковая радионавигация является одним из перспективных направлений прикладной космонавтики. Она обеспечивает качественно новый уровень координатно-временного обеспечения наземных, морских, воздушных и космических потребителей. Это подтверждается такими важными достоинствами современных спутниковых радионавигационных систем (СРНС) типа ГЛОНАСС и GPS (NAVSTAR), как глобальность рабочей зоны, неограниченная пропускная способность, скрытность, живучесть, беспрецедентно высокая точность и непрерывность измерений пространственных координат потребителей, их скорости движения и пространственной ориентации, текущего времени и т.д. Указанные свойства СРНС предопределили возможность рассмотрения вопроса об использовании в перспективе СРНС в качестве единственного средства для определения местоположения летательного аппарата (ЛА) и времени. В настоящее время предусматривается использование СРНС не только в целях навигации, но и для наблюдения за воздушным пространством в целях УВД (принцип зависимого наблюдения). Кроме того, предполагается использование СРНС для сокращения минимума эшелонирования, обеспечения опознавания ЛА в рамках реализации концепции координатно-временного опознавания ("свой чужой"). Для правильного решения вопросов комплексного применения технических средств самолетовождения необходимо знание принципов работы тех или иных средств, их возможностей и способов использования для решения различных навигационных задач. Авиационная техника и технические средства самолетовождения непрерывно развиваются. Современные самолеты оснащаются автоматизированными навигационными комплексами, значительно повышающими точность, надежность и безопасность самолетовождения. Широкое применение получают системы для автоматического самолетовождения по маршруту и для автоматического захода на посадку.
СПИСОК ЛИТЕРАТУРЫ 1. Авиационные радионавигационные устройства и системы/ Под ред. М.С. Ярлыкова.- М.: ВВИА, 1980. – 384 с. 2. Белавин, О.В. Основы радионавигации: Учеб. пособие для вузов.- М.: Сов. радио, 1977.- 320 с. 3. Ярлыков, М.С. Статистическая теория радионавигации.- М.: Радио и связь, 1985.- 344 с. 4. Беляевский, Л.С. Основы радионавигации: Учебник для вузов гражд. авиации/ Л.С. Беляевский, В.С. Новиков, П.В. Олянюк. – М.: Транспорт, 1982. - 288 с. 5. Радиотехнические системы: Учеб. для вузов по специальности «Радиотехника»/ Ю.П. Гришин, В.П. Ипатов, Ю.М. Казаринов.; Под ред. Ю.М. Казаринова.- М.: Высш. шк., 1990.- 496 с. 6. Сиверс, А.П. Основы космической радиоэлектроники.- М.: Сов. радио, 1969.- 312 с. 7. Спутниковая радионавигация. ОНЧ- радионавигационные системы\ http\\www.krugosvet.ru.articles 8. Алгоритмы обработки информации инерциально-спутниковой системы навигации и управления летательным аппаратом. Электронный журнал. Инженерное образование. №10, 2004. http\\www.techno.edu.ru 9. Карасев, В.В. Современные спутниковые радионавигационные системы./Учеб. пособие.- Владивосток: ДГТРУ, 2006.- 54 с. 10. Кудрявцев, И.В. Бортовые устройства спутниковой радионавигации. – М.: Транспорт, 1998.
Содержание Введение 3 1 Общие сведения о глобальных спутниковых 5 радионавигационных системах 1.1 Принцип действия СРНС 5 1.2 Описание современных спутниковых радионавигационных систем 6 1.3 Задачи и области применения спутниковых радионавигационных систем. 11 2 Обобщённая структурная схема СРНС 13 2.1 Принципы построения СРНС 13 2.2 Подсистема космических аппаратов 14 2.3 Наземный командно-измерительный комплекс 15 2.4 Навигационная аппаратура потребителей СРНС 15 2.5 Взаимодействие подсистем СРНС. 16 3 Определение местоположения пользователя в геоцентрической системе координат. 18 3.1 Опорные системы координат 18 3.2 Системы местоопределения 21 3.3 Краткий обзор существующих методов определения координат 22 4. Тактико-технические данные системы Navstar. 23 4.1 Общие сведения о системе. 23 4.2 Система координат 24 4.3. Состав системы Navstar GPS. 25 4.4. Кодирование навигационных сигналов. 26 5. Совмещённый режим работы систем. 30 5.1 Условия для совместной работы. 30 5.2 Будущее космической навигации. 31 5.3 Приемники Navstar GPS /ГЛОНАСC. 32 5.4 Расчет координат. 34
Список используемой литературы 37 Введение
Успешное освоение человечеством воздушно-космического пространства определило развитие нового направления древнейшей науки навигации – воздушной навигации. Первоначальный смысл латинского слова navigatio – плыву на судне (другой вариант перевода - мореплавание). В наше время это понятие приобрело новое содержание, включающее плавание в воздушном океане и даже в космическом пространстве. Современное разнообразие транспортных средств не меняет сути решаемой навигационной задачи: для любого движущегося объекта необходимо определить такой путь движения, который бы обеспечивал наилучшие показатели качества. После определения заданного пути следует осуществлять оценку степени близости реальной траектории и той, которая была определена как наилучшая. Чтобы оценить величину ошибки, необходимо, в свою очередь, определить место положения движущегося объекта в той же системе координат, в которой определен заданный путь. По величине отклонения текущих координат объекта от рассчитанных ранее формируется вектор управляющих воздействий, направленный на устранение рассогласования. Термин «навигация» традиционно не применяется к вождению объектов, траектории, движения которых заранее жестко определены и положение которых в любой момент времени известно, например железнодорожных составов. Основой успешного самолетовождения является комплексное применение технических средств, которое заключается в том, что самолетовождение осуществляется с помощью не одного какого-либо средства, а нескольких. При этом результаты навигационных определений, полученные с помощью одних средств, уточняются с помощью других средств. Такое дублирование исключает возможность допущения грубых ошибок, повышает точность и надежность самолетовождения. Спутниковая радионавигация является одним из перспективных направлений прикладной космонавтики. Она обеспечивает качественно новый уровень координатно-временного обеспечения наземных, морских, воздушных и космических потребителей. Это подтверждается такими важными достоинствами современных спутниковых радионавигационных систем (СРНС) типа ГЛОНАСС и GPS (NAVSTAR), как глобальность рабочей зоны, неограниченная пропускная способность, скрытность, живучесть, беспрецедентно высокая точность и непрерывность измерений пространственных координат потребителей, их скорости движения и пространственной ориентации, текущего времени и т.д. Указанные свойства СРНС предопределили возможность рассмотрения вопроса об использовании в перспективе СРНС в качестве единственного средства для определения местоположения летательного аппарата (ЛА) и времени. В настоящее время предусматривается использование СРНС не только в целях навигации, но и для наблюдения за воздушным пространством в целях УВД (принцип зависимого наблюдения). Кроме того, предполагается использование СРНС для сокращения минимума эшелонирования, обеспечения опознавания ЛА в рамках реализации концепции координатно-временного опознавания ("свой чужой"). Для правильного решения вопросов комплексного применения технических средств самолетовождения необходимо знание принципов работы тех или иных средств, их возможностей и способов использования для решения различных навигационных задач. Авиационная техника и технические средства самолетовождения непрерывно развиваются. Современные самолеты оснащаются автоматизированными навигационными комплексами, значительно повышающими точность, надежность и безопасность самолетовождения. Широкое применение получают системы для автоматического самолетовождения по маршруту и для автоматического захода на посадку.
Общие сведения о глобальных спутниковых радионавигационных системах. 1.1. Принцип действия СРНС. Спутниковая радионавигационная система (СРНС) - комплексная электронно-техническая система, состоящая из совокупности наземного и космического оборудования, предназначенная для определения местоположения (географических координат и высоты), а также параметров движения (скорости и направления движения и т. д.) для наземных, водных и воздушных объектов. Роль опорных радионавигационных точек (РНТ) СРНС выполняют искусственные спутники Земли, несущие навигационную аппаратуру (НИСЗ).
Рис. 1.1.1. Система навигационных искусственных спутников Земли (НИСЗ). Основные элементы спутниковой системы навигации: Орбитальная группировка, состоящая из нескольких (от 2 до 30) спутников, излучающих специальные радиосигналы; Наземная система управления и контроля, включающая блоки измерения текущего положения спутников и передачи на них полученной информации для корректировки информации об орбитах; Приёмное клиентское оборудование («спутниковых навигаторов»), используемое для определения координат; Опционально: информационная радиосистема для передачи пользователям поправок, позволяющих значительно повысить точность определения координат. Принцип работы спутниковых систем навигации основан на измерении расстояния от антенны на объекте (координаты которого необходимо получить) до спутников, положение которых известно с большой точностью. Таблица положений всех спутников называется альманахом, которым должен располагать любой спутниковый приёмник до начала измерений. Обычно приёмник сохраняет альманах в памяти со времени последнего выключения и если он не устарел — мгновенно использует его. Каждый спутник передаёт в своём сигнале весь альманах. Таким образом, зная расстояния до нескольких спутников системы, с помощью обычных геометрических построений, на основе альманаха, можно вычислить положение объекта в пространстве. Метод измерения расстояния от спутника до антенны приёмника основан на определённости скорости распространения радиоволн. Для осуществления возможности измерения времени распространения радиосигнала каждый спутник навигационной системы излучает сигналы точного времени в составе своего сигнала используя точно синхронизированные с системным временем атомные часы. При работе спутникового приёмника его часы синхронизируются с системным временем и при дальнейшем приёме сигналов вычисляется задержка между временем излучения, содержащимся в самом сигнале, и временем приёма сигнала. Располагая этой информацией, навигационный приёмник вычисляет координаты антенны. Для получения информации о скорости большинство навигационных приёмников используют эффект Доплера. Дополнительно накапливая и обрабатывая эти данные за определённый промежуток времени, становится возможным вычислить такие параметры движения, как скорость, пройденный путь и т. д.
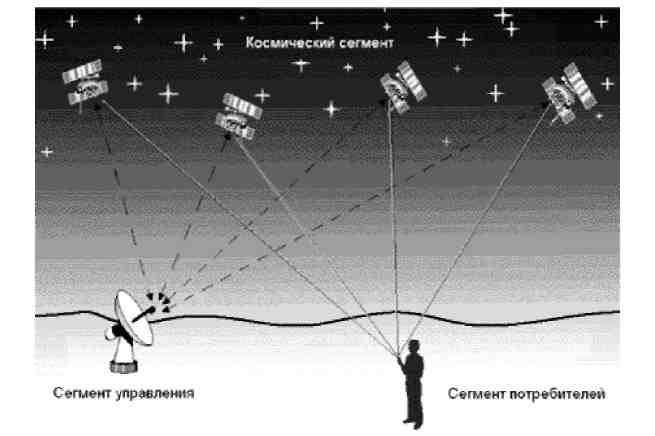
1.2. Описание современных спутниковых радионавигационных систем. Основное назначение СНРС ⎯ глобальная оперативная навигация приземных подвижных объектов: наземных (сухопутных, морских, воздушных) и низкоорбитальных космических. Термин «глобальная оперативная навигация» означает, что подвижной объект, оснащенный навигационным приемником (НАП), может в любом месте приземного пространства в любой момент времени определить (уточнить) параметры своего движения ⎯ три координаты и три составляющие вектора скорости. Принципы построения СРНС ГЛОНАСС, NAVSTAR и GALILEO в общих чертах идентичны, но отличаются техническим выполнением подсистем. Архитектура спутниковых радионавигационных систем. Современные СРНС включают в себя три сегмента (рис 1.2.2.): орбитальную группировку (ОГ) НКА (космический сегмент); наземный комплекс управления (НКУ) орбитальной группировкой НКА (сегмент управления); аппаратуру пользователей (сегмент потребителей)..
В СРНС применяются навигационные космические аппараты (НКА) на круговых геоцентрических орбитах с высотой ∼20000 км над поверхностью Земли. Таким образом, за сутки каждый НКА совершает примерно 2 оборота вокруг Земли. Благодаря использованию атомных стандартов частоты (АСЧ) на НКА в системе обеспечивается взаимная синхронизация навигационных радиосигналов, излучаемых орбитальной группировкой НКА. В НАП на подвижном объекте в сеансе навигации принимаются радиосигналы не менее чем от четырех радиовидимых НКА и используются для измерения трех разностей дальностей и трех разностей радиальных скоростей объекта относительно четырех НКА. Результаты измерений и эфемеридная информация (ЭИ), принятая от каждого НКА, позволяют определить (уточнить) три координаты и три составляющие вектора скорости подвижного объекта и определить смещение шкалы времени (ТТТВ) объекта относительно ТТТВ системы. В СРНС число потребителей не ограничивается, поскольку НАП не передает радиосигналы на НКА, а только принимает их от НКА. Радионавигационное поле в СРНС наряду с основной функцией (глобальная автономная оперативная навигация приземных подвижных объектов) позволяет проводить: - локальную высокоточную навигацию наземных подвижных объектов (сухопутных, морских, воздушных) на основе дифференциальных методов навигации с применением стационарных наземных корректирующих станций; - высокоточную относительную геодезическую «привязку» удаленных наземных объектов; - взаимную синхронизацию стандартов частоты и времени на удаленных наземных объектах; - неоперативную автономную навигацию среднеорбитальных космических объектов; - определение ориентации объекта на основе радиоинтерферометрических измерений на объекте с помощью навигационных радиосигналов, принимаемых разнесенными антеннами. Формирование радионавигационного поля (на примере ГЛОНАСС). Навигационные радиосигналы, излучаемые штатными НКА, образуют радионавигационное поле в околоземном пространстве. В СРНС ГЛОНАСС каждый штатный НКА излучает навигационные радиосигналы в сторону Земли с помощью передающих антенн, рабочая часть диаграммы направленности (ДН) которых имеет ширину 2=38° и «освещает» диск Земли с
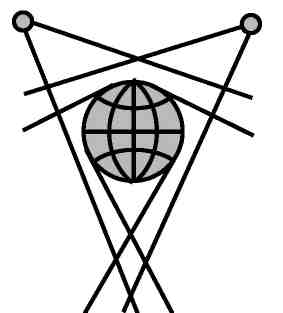
избытком до высоты h0 над поверхностью.
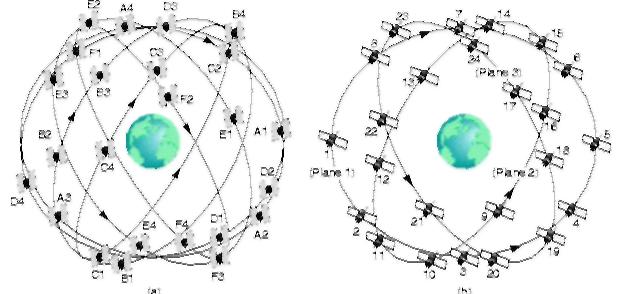
Рис. 1.2.3. Продольное сечение радиолучей. Рабочую часть ДН можно представить в виде конусного радиолуча. Изображение продольных сечений конусных радиолучей передающих антенн НКА дано на рис.1.2.3. Конусный луч сплошной до встречи с Землей, а за диском Земли становится полым. При полной орбитальной группировке (24 штатных НКА) радионавигационное поле на высотах h < h0 = 2000 км непрерывно в пространстве, т.е. потребитель в любой точке этого пространства «освещается» радиолучами не менее чем от четырех НКА, образующих по отношению к нему удовлетворительное по геометрическому фактору созвездие для оперативного автономного определения координат и вектора скорости. Космический сегмент. Основной геометрической характеристикой орбитальной группировки штатных НКА в СРНС, от которой зависит точность навигации наземных потребителей, являются геометрические свойства созвездия НКА, которое «видит» наземный потребитель. Минимально необходимое для наземного потребителя оптимальное созвездие содержит четыре НКА: один НКА вблизи зенита, три НКА вблизи горизонта равномерно разнесены по направлению. Полная проектная орбитальная группировка (ОГ) в СРНС ГЛОНАСС содержит 24 штатных НКА на круговых орбитах с наклонением i =64,8°относительно экваториальной плоскости в трех орбитальных плоскостях по восемь НКА в каждой. Долготы восходящих узлов трех орбитальных плоскостей различаются номинально на 120° (рис. 1.2.4.). Номинальный период обращения НКА равен Т=11 ч 15 мин 44 с, и, соответственно, номинальная высота круговой орбиты составляет 19100 км над поверхностью Земли. В каждой орбитальной плоскости восемь НКА разнесены по аргументу широты номинально через 45°, и аргументы широты восьми НКА в трех орбитальных плоскостях сдвинуты на ±15°. За время эксплуатации НКА на орбите (до 7,5 лет) реальные положения НКА в ОГ могут отличаться от номинальных не более чем на ±5°.
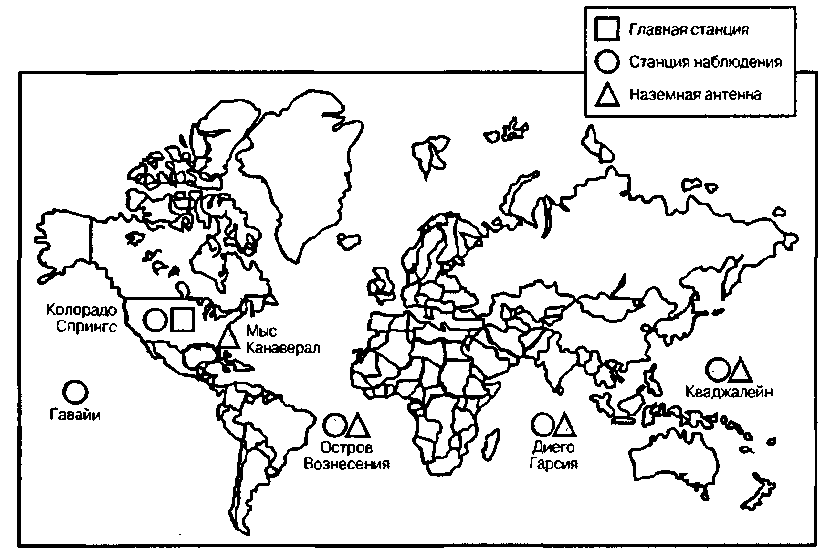
Полная ОГ в системе NAVSTAR-GPS содержит 24 штатных НКА на круговых синхронных орбитах с периодом обращения Т ≈ 12ч 00 мин (высота орбиты составляет около 20200 км над поверхностью Земли) в шести орбитальных плоскостях (по четыре НКА в каждой) с наклонением i =55° относительно экваториальной плоскости, долготы восходящих узлов которых смещены с интервалом номинально 60° (рис. 1.2.5.). Четыре спутника не распределены равномерно в пределах одной плоскости - по два спутника обособленно, с углом между ними приблизительно 30 градусов. Европейский союз совместно с Европейским космическим агентством приняли решение строить систему GALILEO таким образом: чтобы она была, с одной стороны, максимально совместимой с Американской Navstar GPS, но с другой стороны, могла функционировать абсолютно независимо от нее. Таким образом, созвездие спутников GALILEO будет состоять из 27 спутников в трех орбитальных плоскостях, каждая с 9 спутниками, равномерно распределенными в пределах круговой орбиты. Ключевые параметры - орбитальный радиус будет равен приблизительно 23600 километров и склонение 56 градусов относительно экваториальной плоскости. Чтобы обеспечивать необходимую избыточность на орбите и позволить быстрое восстановление в случае отказа спутников, предполагаются три активных резервных спутника, по одному в каждой орбитальной плоскости. Наземный комплекс управления. Наземный комплекс управления (НКУ) орбитальной группировкой НКА выполняет четыре группы задач: - эфемеридное и частотно-временное обеспечение НКА; - мониторинг радионавигационного поля; - радиотелеметрический мониторинг НКА; - командное и программное радиоуправление функционированием НКА. Для синхронизации шкал времени различных спутников с необходимой точностью на борту НКА используются цезиевые стандарты частоты с относительной нестабильностью порядка 10-13. На наземном комплексе управления используется водородный стандарт с относительной нестабильностью 10-14. В состав НКУ входят средства коррекции шкал времени спутников относительно эталонной шкалы с погрешностью 3–5 нс. Наземный сегмент обеспечивает эфемеридное обеспечение спутников. Это означает, что на земле определяются параметры движения спутников и прогнозируются значения этих параметров на заранее определённый промежуток времени. Параметры и их прогноз закладываются в навигационное сообщение, передаваемое спутником наряду с передачей навигационного сигнала. Сюда же входят частотно-временные поправки бортовой шкалы времени спутника относительно системного времени. Измерение и прогноз параметров движения НКА производятся в Баллистическом центре системы по результатам траекторных измерений дальности до спутника и его радиальной скорости. Сегмент наземного комплекса управления системы ГЛОНАСС представлен на рис. 1.2.6. Эфемеридное обеспечение (ЭО) НКА означает: определение и прогноз параметров движения НКА и «закладку» на борт НКА эфемеридной информации (ЭИ) для кадров цифровой информации (ЦИ) в навигационных радиосигналах. Частотно-временное обеспечение (ЧВО) НКА означает определение и прогноз бортовой шкалы времени (БШВ) относительно шкалы времени (ШВ) системы и «закладку» на борт НКА частотно-временных поправок (ЧВП) к БШВ, помещаемых в кадры ЦИ в навигационных радиосигналах. Определение и прогноз параметров движения НКА осуществляет Баллистический центр (БЦ) системы на основе результатов траекторных измерений дальности и радиальной скорости НКА, поступающих от сети наземных радиотехнических «запросных» командно-измерительных пунктов (КИП). В НКУ используются не менее трех КИП, расположенных на территории России (западная, центральная, восточная) на географической широте в пределах 50°...60°с.ш. КИП на географической широте не менее 50°с.ш. «наблюдает» каждый НКА при углах возвышения не менее 5° в течение сеансов длительностью 1...5 ч на каждом витке орбиты НКА. Сегмент наземного комплекса управления Navstar GPS представлен на рис. 1.2.7. Комплекс выполняет аналогичные ГЛОНАСС задачи. В наземных комплексах управления системы Navstar GPS, в отличие от системы ГЛОНАСС, подсистемы эфемеридного обеспечения и частотно-временного обеспечения построены совместно. Министерство Обороны США управляет системой с помощью четырёх наземных станций управления - главная станция и три станции управления потоками данных: Станции слежения непрерывно отслеживают спутники и передают информацию на главную станцию. Главная станция вычисляет поправки синхронизации атомных часов спутников. Она также исправляет орбитальную информацию (эфемериды спутников). Главная станция передаёт результаты своей работы станциям загрузки. Станции управления потоками данных обновляют информацию, передаваемую каждым спутником, используя данные, полученные от главной станции.
Рис. 1.2.6. Сегмент наземного комплекса управления ГЛОНАСС.
1.3. Задачи и области применения спутниковых радионавигационных систем. Основной задачей, выполняемой в СРНС с помощью сегментов высокоорбитальных навигационных систем, является определение пространственных координат местоположения потребителей и времени, т. е. пространственно-временных координат (ПВК). Эту операцию осуществляют в соответствии с концепцией независимой навигации, предусматривающей вычисление искомых навигационных параметров непосредственно в аппаратуре потребителя. В рамках этой концепции в СРНС выбран позиционный способ определения местоположения потребителей на основе беззапросных (пассивных) дальномерных измерений по сигналам нескольких навигационных искусственных спутников Земли с известными координатами. Выбор концепции независимой навигации и использование беззапросных измерений обеспечили возможность достижения неограниченной пропускной способности СРНС. Назначение спутниковых радионавигационных систем (СРНС) очень обширно. Области использования СРНС весьма разнообразны. Ими осуществляется: - Организация воздушного и морского движения, повышение безопасности полетов и мореплавания; - Геодезия и картография, составление земельных и лесных кадастров, строительство дорог, прокладка коммуникаций и трубопроводов контроль сейсмически опасных районов, геология и разведка полезных ископаемых, разработка нефтяных и газовых месторождений на участках прибрежных шельфов, определение параметров вращения Земли и т.д.; - Мониторинг наземного транспорта, организация и управление движением грузов, междугородним железнодорожным и автотранспортом; - Создание «интеллектуальных» транспортных средств; - Экологический мониторинг, организация поисково-спасательных работ; - Локальная высокоточная навигацию подвижных объектов на основе дифференциальных методов навигации с применением стационарных наземных корректирующих (опорных) станций; - Высокоточная взаимная геодезическая привязка удалённых наземных стационарных объектов; - Взаимная синхронизация стандартов частоты и времени на удалённых наземных стационарных объектах; - Оперативная автономная навигация низкоорбитальных космических объектов.
  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|