|
|
Фазовые и фазо – разностные методы измерения дальности. Неоднозначность измерения. Принципы работы ФРНС «Омега» и «Лоран-с»[казаринов, 289,283] Фазовые методы измерения дальности Фазовые методы определения дальности основаны на измерении разности фаз зондирующего и эхо-сигнала в РЛС или измерении разности фаз сигналов, принятых от двух радиомаяков, в РНС. Сущность фазового метода заключается в следующем. Передатчик излучает незатухающие колебания вида U 1(t)= A 1Cos(ω 0 t + φ); приемник принимает отраженный эхо-сигнал U 2(t)= A 2Cos[ ω 0(t+τ)+ φ+ψ ], (2.36) где ψ – изменение фазы колебания при отражении объекта. Колебания U 1(t) и U 2(t) сравниваются в измерителе по фазе: определяется разность фаз ∆ φ = ω 0 τ + ψ и время задержки τ=(∆φ- ψ)/ ω0. Тогда дальность определяется выражением
В общем случае разность фаз ∆ φ может принимать значения ∆ φ =2 kπ + Ѳ, k =0,1,2,… (2.38) где Ѳ – разность фаз, измеряемая схемой фазометра. Число k вносит неоднозначность в измерение дальности, а изменение начальной фазы ψ вносит ошибку в измерения. Для устранения этих явлений измерения проводят на двух близких частотах ω 1 и ω 2. Получается два значения ∆ φ:
Если Тогда разность двух измерений
Однозначно определяет дальность до объекта
Кроме рассмотренного выше в РНС используются и другие методы устранения неоднозначности измерения дальности: - в простейших фазовых РНС неоднозначность измерений устраняется путем непрерывного подсчета целого числа полных фазовых циклов в показаниях фазометра при движении приемника (содержащего фазометр) от точки с известными координатами; - для устранения неоднозначности измерения в фазовых РНС используется амплитудная модуляция несущего колебания гармонической или другой функцией, строго синхронизированной с фазой несущего колебания (рис.2.18).
Рис. 2.18- Модулированное несущее колебание фазовой РНС
Измерение фазы несущего колебания проводится в характерных точках огибающей несущего колебания (например, в точках максимальной амплитуды А1 и А2). В принципе этот метод не отличается от 2-х частотного метода устранения неоднозначности, так как амплитудно-модулированное колебание состоит из нескольких близких по частоте гармонических колебаний. Однако, практически в этом случае нет необходимости измерения разности фаз 2-х частот. В дальнейшем зтот метод будет рассмотрен более подробно на примере широко применяемой РНС типа «Лоран-С». Инструментальная погрешность измерения дальности фазовым методом является наименьшей и может быть определена по формуле
где σD - убывает с увеличением частоты несущего колебания, в то же время чем выше Рассмотрим фазовые методы измерения дальности и координат объекта на примерах фазовой РНС (ФРНС) типа "Омега" и импульсно-фазовой РНС (ИФРНС) типа "Лоран-С". В этих системах для определения координат объекта используются дальномерные, квазидальномерные, разностно-дальномерные методы. При дальномерных измерениях бортовая шкала совмещается со шкалой времени опорных РМ (надо знать точное время); при квазидальномерных измерениях имеется постоянное (но априори неизвестное) расположение шкал времени, которое определяется в процессе измерений; при разностно-дальномерном методе измерений расхождение шкал времени опорных РМ и бортовой шкалы также неизменно в течении сеанса измерений и компенсируется в процессе измерений за счет вычисления разности дальностей (разности запаздывания сигналов). ФРНС "Омега" является классическим примером многочастотной ФРНС работающей в диапазоне очень низких рабочих частот (10+ 5)кГц, что позволяет с помощью восьми радиомаяков обеспечить возможность определения местоположения объекта(потребителя) в любом районе земного шара, так как затухание СДВ слабо зависит от расстояния. В ФРНС "Омега" используется частотно-временное разделение сигналов (рис.2.19). Наземные опорные РМ (A,B,C,D,E,F,G,H) синхронизировано излучают радиоимпульсы большой" длительности (0,9+1,2)с на частотах 10,2; 13,6; 11,ЗЗ кГц (одновременно работают три радиомаяка). Сигналы 10,2кГц используются для формирования шкалы высокой точности (∆DT=14,7км). Для создания грубой шкалы (устранение неоднозначности измерения фазы частоты 10,2кГц) используются биения частот 13,6 и 10,2кГц и сврехгрубой – биения 11,33 и 10,2 кГц (предполагается, что с точностью до сверхгрубой шкалы местоположение потребителя известно): F2,0 = f2 – f0 = 13.6 – 10.2 = 3.4кГц (грубая шкала ∆DГ = 44км); (2.42) F1,0 = f1 – f0 = 11.33 – 10.2 = 1.13кГц (сверхгрубая шкала ∆DГ = 132км).
Рис.2.19 Временная диаграмма работы маяков ФРНС "Омега"
Результат измерения РНП уточняется последовательно: сверхгрубая оценка, грубая, точная, для чего используется многоступенчатый алгоритм обработки сигналов. При этом определяется либо РНП (например, дальность), а затем по карте линий положения определяются координаты, либо результаты измерений вводятся в бортовую ЭВМ и рассчитываются координаты и другие характеристики положения объекта (рис.2.20).
Рис.2.20 Бортовой комплекс ФРНС «Омега»
БСА – блок согласования с антенной (А); ЦАП – цифровая АРУ для согласования динамического диапазона сигнала с АУП; ПЗУ – постоянное запоминающее устройство для хранения данных об условиях распространения радиоволн, координат и характеристик радиомаяков и других констант. Бортовая ЭВМ выполняет операции над числами, поступающими в АЦП в соответствии с алгоритмами обработки сигналов во всех режимах измерения: идентификация сигналов, приходящих от различных РМ, синхронизация измерителя с диаграммой излучения (рис.2.19), слежение за фазой сигналов и измерение фаз, устранение многозначности, оценка отношения сигнал/шум и отбраковка ненадежных измерений, преобразование РНП в географические координаты с учетом поправок распространения радиоволн. Пульт управления и индикации служит для ввода исходных данных и отображения данных параметрах движения и координатах объекта. ИФРНС типа "Лоран-С" получили широкое распространение в длинноволнового диапазона (f0 ~ 100кГц). Дальность действия этих систем достигает 2000км. Опорные РМ объединены в группы по 3÷6 наземных станций, одна из которых является ведущей. Измерение дальности производится импульсно-фазовым методом: грубое измерение разности дальностей производится по оценке времени запаздывания огибающей импульсов ведущей и ведомых станций, а точное - по оценке разности фаз несущих колебаний этих же импульсов. Поэтому в ИФРНС сочетаются положительные качества фазовых и импульсных методов измерения: высокая точность и однозначность измерения. Ведущая станция излучает восьмиимпульсные качки радиоимпульсов с дискретной фазовой модуляцией (рис.2.21).
Рис.2.21 Временные диаграммы излучения ведущей и ведомой станций T u=1000мкс, T n=(40÷100)мс, T k=2 T n.
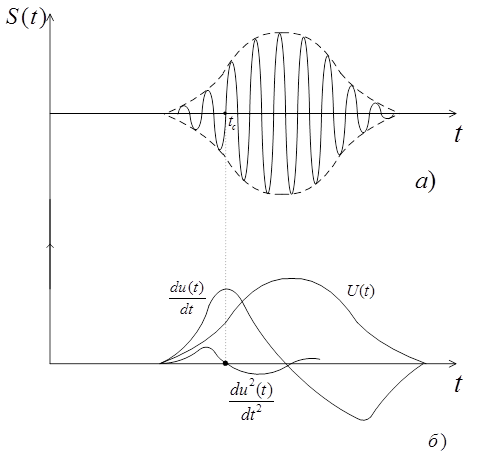
Период повторения пачек импульсов Tn одинаковый для станций одной группы и отличается от других групп, что позволяет приемника идентифицировать конкретную группу станций. Ведомые станции группы синхронизируются от ведущей и излучают импульсы такой же последовательности, но сдвинутые по времени на фиксированный интервал, ведомые станции имеют отличный от ведущих закон модуляции импульсов внутри пачек. На временной диаграмме фазы импульсов, отмечен ные знаками «+» и «-» отличаются на 180°. Каждый радиоимпульс пачки имеет длительность 80мкс, его огибающая имеет медленно нарастающий передний фронт с изменением крутизны в средней части высоты импульса (рис.2.22а). Для измерений используется только поверхностная радиоволна используемого длинноволнового диапазона, возможный в точке приема сигнал от пространственного распространения радиоволн является помехой и имеет задержку на 35+50мкс, что позволяет отделить его от основного сигнала и не учитывать в процессе измерений. Форма огибающей радиоимпульсов используется приемником для определения рабочей точки t0, в которой производится измерение фазы и благодаря которой устраняется неоднозначность измерения. Положение рабочей точки, должно быть одинаковым для всех станций, поиск этого положения, захват сигнала и сопровождение по фазе осуществляется аналогично показному на рис.2. 15. Дискриминатор следящего измерителя фазы в качестве сигнального напряжения обычно использует вторую производную огибающей радиоимпульса (рис.2.226), которая изменяет знак в рабочей точке. После определения рабочей точки и устранения неоднозначности вырабатывается команда на разрешение отсчета РНП в виде разности временных положений рабочих точек следящих измерителей.
Рис. 2.22 Формирование рабочей точки в ИФРНС типа "Лоран-С"
Таким образом приемоиндикаторы (ПИ) ИФРНС производят: прием и усиление сигналов, грубый поиск и распознавание сигналов ведущей и ведомых станций, точный поиск, слежение за фазой сигналов, устранение неоднозначности измерений фазы, измерение РНП и определение координат потребителя. При построении ИМ используются последние достижения микроэлектроники и вычислительной техники для обработки, сигналов. На рис. 2.23 показана структурная схема ПИ в части, относящейся к обработке выходного сигнала до ввода в ЭВМ. На рис. 2.23 БСА - блок согласования с антенной, ПУ - полосовой усилитель с регулируемой полосой пропускания и АРУ(∆F в режиме поиска в 5кГц, в режиме слежения и формирования рабочей точки 20-30кГц), ОУ - двухсторонние усилители ограничители, ФРТ - блок формирования рабочей точки по огибающей и устранения неоднозначности (работает в комплексе с временным дискриминатором ВД3 и ЗБМ).
Рис. 2.23 Структурная схема приёмоиндикатора ИФРНС
После включения приемника начинается поочередно (или одновременно в зависимости от производительности ЭВМ) поиск сигналов ведущей и ведомых станций с помощью временного дискриминатора ВД1. Последующие операции слежения (временной дискриминатор ВД2).и устранения неоднозначности осуществляется одновременное для ведущей и ведомых станций (на рис.2.23 показан только один канал для одной станции). В ЭВМ производится накопление бинарно-квантованных значений сигнала и сравнение с порогами в соответствии с алгоритмом устранения неоднозначности. Для обеспечения линейности частотно-избирательного тракта во всем диапазоне рабочих напряжений в ПУ используется АРУ, которая в режиме поиска увеличивает коэффициент усиления до максимума, а в других режимах поддерживает ого на уровне, обеспечивающем линейность прохождения сигналов для измерения PHП. Применение жесткого ограничителя сигналов в ОУ приводит к ухудшению отношения сигнал/шум в 1,4 раз, но позволяет минимизировать затраты на согласование выходных сигналов блоков ПУ и ФРТ и вычислительные затраты в бортовой ЭВМ. Дальнейшее совершенствование бортовых ПИ направлено на применение АЦП после ПУ и последующую обработку оцифрованного сигнала на бортовой ЭВМ, в том числе формирование рабочей точки. Если позволяет вычислительная мощность бортовой ЭВМ, вместо ПУ также может использоваться цифровой фильтр, что позволяет унифицировать бортовые ПИ всех радионавигационных систем. Их различие проявляется только на уровне программного обеспечения.
  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 . (2.37)
. (2.37) ,
, .
. , то k = n и
, то k = n и  .
. . (2.39)
. (2.39) . (2.40)
. (2.40)
 , (2.41)
, (2.41) - среднеквадратическая погрешность измерения фазы;
- среднеквадратическая погрешность измерения фазы; ,тем в большей степени увеличивается неопределенность вычисления дальности из-за неоднозначности измерения фазы.
,тем в большей степени увеличивается неопределенность вычисления дальности из-за неоднозначности измерения фазы.