
|
|
Принцип построения радиосистем управления движением, декартовая, полярная и комбинированная системы управления. Структурная схема наземного и бортового оборудования радиосистем управления.Принцип построения радиосистем управления движение
Радиоуправления – это отрасль радиотехники, включающая методы и средства автоматического управления объектами. Технические средства радиоуправления образуют систему радиоуправления (РУ). В системах РУ различаются системы телеуправления (ТУ) и системы самонаведения (СН). Телеуправление – это радиоуправление объектами (в основном, летательными аппаратами – ЛА) с пункта управления (или с командного пункта). Самонаведение – это радиоуправление с помощью бортовой радиоаппаратуры. Самонаведение обычно используется в сочетании с телеуправлением и упрощает аппаратуру пункта управления или позволяет управлять одновременно несколькими объектами. Системы радиоуправления движением, в основном, получили развитие в технике управления летательными аппаратами, как гражданского, так и военного назначения: космическими аппаратами, самолётами, ракетами ближнего и дальнего действия, зенитными снарядами и пр. Современный управляемый летательный аппарат (ЛА) состоит из следующих основных частей, участвующих в системе управления: корпуса с полезной нагрузкой, крыльев, двигателя, рулевых органов, аппаратуры управления. Корпус несёт полезную нагрузку и связывает в единое целое все другие части ЛА. Основные геометрические характеристики корпуса: длина, диаметр, площадь наибольшего поперечного сечения. Крылья имеют ЛА, совершающие полёты в атмосфере, крылья обеспечивают более высокую манёвренность ЛА. Рулевые органы могут быть аэродинамическими на крыльях ЛА или в виде специальных рулевых двигателей, позволяющих изменить направление силы тяги для создания поперечного ускорения изменения в нужном направлении первоначальной траектории. По способу создания ускорения существующие системы рулевого управления разделяются на декартовы, полярные и комбинированные. Декартово рулевое управления имеют два органа: руль поворота, создающий составляющую Полярное управление состоит из руля глубины, который управляет модулем поперечного ускорения
Рисунок 3.1- Системы рулевого управления
При отсутствии крыльев для полярного управления используется один маршевый двигатель, изменение направления вектора тяги Входящие в систему управления бортовые приборы обеспечивают движения ЛА по траектории. В состав бортовой аппаратуры входят системы самонаведения и стабилизации движения относительно центра массы. Для описания движения ЛА в качестве модели управляемого объекта берётся абсолютно твёрдое тело данной конфигурации, которое под действием сил, приложенных к центру масс, движется вдоль траектории, а под действием моментов сил, линии которых через центр масс не проходят, вращается (рисунок 3.2).
Рисунок 3.2 - Модель управляемого объекта Аэродинамическая сила прикладывается к точке, называемой центром давления, в результате чего образуется момент вращения
При удалении от Земли сила тяжести не может оставаться постоянной
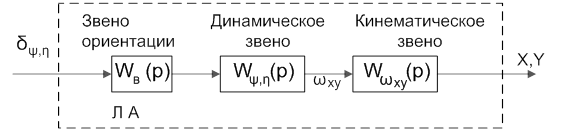
где Для управления полётом, то есть изменения траектории объекта, необходимо, чтобы к центру масс была приложена составляющая равнодействующей силы, нормальная к траектории. Таким образом, управление ЛА сводится к управлению его рулевыми органами, а сам ЛА представляет собой звено контура автоматического управления, на вход которого поступает управляющего воздействия в виде поворота рулевых аэродинамических плоскостей, лопастей газовых рулей, поворота реактивной струи двигателя ориентации или включения корректирующих двигателей. Входными величинами звена управления является приращение координат центра масс при движении по траектории. Поскольку твёрдое тело, каким является ЛА, обладает в общем случае шестью степенями свободы, то система управления, которая описывает его движения, должна содержать шесть независимых уравнений в виде проекций на оси координат. Приближенно структурная схема ЛА может быть представлена тремя последовательными звеньями (рисунок 3.3), на вход которых поступает угол отклонения руля
Рисунок 3.3- Структурная схема системы управления ЛА Звено ориентации определяет связь входного воздействия с изменением координат объекта в горизонтальной и вертикальной плоскостях (
где параметры функции передачи выражаются через силы и моменты
где
Практически, вследствие статической неустойчивости ЛА, управление возможно только при условии соответствующей коррекции передаточной функции за счёт охвата звена ориентации цепью обратной связи. Физической реализацией корректирующей цепи обратной связи может служить устройство, имеющее выходную переменную звена ориентации
для горизонтальной плоскости можно аналогично записать Для получения текущих координат ЛА на траектории необходимо дополнить уравнения аэродинамики (3.3, 3.4) кинематическими соотношениями
где Кинематическое звено не реализуется в виде какой–либо конструкции, а математически моделирует существующие в природе связи между перемещением и ускорением. Передаточная функция этого звена имеет вид операторного предоставления двоичного интеграла:
и соответственно в горизонтальной плоскости
где Движение ЛА по траектории сопровождается возмущающими воздействиями (например, турбулентностью атмосферы), изменяющими случайным образом его ориентацию. Почти всегда управление движением ЛА в атмосфере осуществляется путём воздействия на рули через систему стабилизации ориентации («автопилот»), который охватывает звено ориентации обратной связью. «Автопилот» представляет собой устройство с тремя выходами по системе координат: Из теории полёта ЛА известно, что сохранение в полете нулевого крена устраняет взаимную связь между углами поворота по тангажу и рысканью. Отсутствие связи между углами позволяет строить замкнутый контур автоматической стабилизации каждого из углов отдельно путём раздельного измерения отклонения угла по каждой координате и воздействия полученным сигналом ошибки на соответствующий руль, то есть в этом случае автопилот распадается на три отдельных устройства. На рисунке 3.4 показана структурная схема автопилота по одной угловой координате, которая содержит звенья, отображающие корпус ЛА, датчик отклонения для измерения отклонения и рулевой тракт.
Рисунок 3.4- Структурная схема автопилота Кратко рассмотрим каждое звено. 1. Звено «корпуса ЛА» описывается передаточной функцией 2. Рулевой тракт представляет собой силовой следящий привод с обратной связью, управляющий рулевыми машинами, которые обрабатывают измеренный угол поворота корпуса ЛА, воздействуя на соответствующие элементы рулевого устройства. Угол поворота руля Каждый такой датчик представляет собой свободный гироскоп (гироскоп с тремя степенями свободы). Обычно это электромотор, ротор которого обладает по возможности большим моментом количества движения
где Для увеличения момента инерции ротор гироскопа выполняется возможно большого диаметра при данной массе, угловые скорости достигают сотен тысяч оборотов в минуту. Статор свободного гироскопа (рисунок 3.5) подвешивается в корпусе ЛА с помощью двойного карданова подвеса, обеспечивающего свободный его поворот вокруг двух взаимно перпендикулярных осей, что вместе с вращением ротора «1» вокруг главной оси «а» образует три степени свободы. Для измерения трёх углов
Рисунок 3.5- Функциональная схема гироскопа
Двойной карданов подвес состоит из двух рамок «2» и «3», поворачивающихся вокруг взаимно–перпендикулярных осей. Ось внешней рамки «3» укреплена в подшипниках, установленных в корпусе неподвижно относительно корпуса ЛА; ось внутренней рамки «2» - в подшипниках, укреплённых во внешней рамке; ось ротора «а» - в подшипниках внутренней рамки. Все оси пересекаются в одной точке, совпадающей с центром масс гироскопа. Углы поворота рамок измеряются с помощью потенциометров «4» и «5», движки которых жестко связаны с поворачивающейся осью, а обмотки с основанием подшипника, внутри которого вращается ось. Измерение углов основано на известном в механике свойстве вращающегося тела, сохранять положение своей главной оси вращения неизменным в пространстве. Неизменность положения главной оси «а» приводит к образованию измеряемого потенциометром угла поворота корпуса относительно плоскости внешней рамки, а при повороте ЛА вокруг оси внутренней рамки - к измеряемому вторым потенциометром повороту плоскости внешней рамки относительно плоскости внутренней. Для измерения углов тангажа и рысканья ось гироскопа может совпадать с продольной осью ЛА (ось OZ), для измерения крена ось гироскопа может располагаться вдоль оси OY или оси OX. Измерение углов с помощью свободных гироскопов производиться практически безинерционно, то есть передаточная функция потенциометрических датчиков гироскопа имеет вид
Безинерционность гироскопического датчика объясняется тем, что его масса не участвует в движении при измерении угла; гироскоп в первом приближении остаётся неподвижным, а корпус ЛА поворачивается вокруг него, создавая угол положения движка потенциометра относительно корпуса.
  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 поперечного ускорения, обеспечивает разворот ЛА в горизонтальной плоскости (по курсу
поперечного ускорения, обеспечивает разворот ЛА в горизонтальной плоскости (по курсу  ) и руль высоты, создающий составляющую
) и руль высоты, создающий составляющую  поперечного ускорения, обеспечивает разворот ЛА в вертикальной плоскости по тангажу (
поперечного ускорения, обеспечивает разворот ЛА в вертикальной плоскости по тангажу ( ) при условии, что в момент поворота угол крена
) при условии, что в момент поворота угол крена  (угол поворота вокруг продольной оси) равен нулю (рисунок 3.1)
(угол поворота вокруг продольной оси) равен нулю (рисунок 3.1)
 производится путём изменения ориентации всего ЛА или поворотом (в небольших приделах) только двигателя.
производится путём изменения ориентации всего ЛА или поворотом (в небольших приделах) только двигателя.
 и равнодействующий момент вращения относительно центра масс
и равнодействующий момент вращения относительно центра масс . (3.1)
. (3.1) (3.2)
(3.2) - ускорение силы тяжести, равное у поверхности Земли
- ускорение силы тяжести, равное у поверхности Земли  и уменьшается по мере увеличения высоты
и уменьшается по мере увеличения высоты  , всегда направлено к центру Земли.
, всегда направлено к центру Земли. , а на выходе образуется приращение координат центра масс
, а на выходе образуется приращение координат центра масс 
 ). Динамические свойства объекта в этих плоскостях описывается системой из двух дифференциальных уравнений, коэффициенты которых можно считать постоянными только на коротких участках траектории. В операторной форме передаточную функцию угла тангажа
). Динамические свойства объекта в этих плоскостях описывается системой из двух дифференциальных уравнений, коэффициенты которых можно считать постоянными только на коротких участках траектории. В операторной форме передаточную функцию угла тангажа  (3.3)
(3.3)


 - коэффициент передачи угла тангажа
- коэффициент передачи угла тангажа  - характеризует величину поперечной перегрузки при отклонении руля;
- характеризует величину поперечной перегрузки при отклонении руля; - масса,
- масса,  - вектор скорости, который всегда направлен по касательной к траектории;
- вектор скорости, который всегда направлен по касательной к траектории; - момент инерции относительно оси
- момент инерции относительно оси  ;
; - аэродинамические коэффициенты, определяемые экспериментально для конкретного ЛА;
- аэродинамические коэффициенты, определяемые экспериментально для конкретного ЛА; - угол между вектором скорости и продольной осью ЛА (осью Z) – угол атаки;
- угол между вектором скорости и продольной осью ЛА (осью Z) – угол атаки; - подъёмная составляющая аэродинамической силы;
- подъёмная составляющая аэродинамической силы; - начальный момент вращения вокруг центра масс, зависящий от скорости, массы и размеров ЛА;
- начальный момент вращения вокруг центра масс, зависящий от скорости, массы и размеров ЛА; - относительный коэффициент демпфирования – определяет величину перерегулирования на переходной характеристики при скачкообразном отклонении руля;
- относительный коэффициент демпфирования – определяет величину перерегулирования на переходной характеристики при скачкообразном отклонении руля; - собственный период колебаний передаточной характеристики ЛА.
- собственный период колебаний передаточной характеристики ЛА. . В результате получаем передаточную функцию динамического звена (рис 3.3) для вертикальной плоскости
. В результате получаем передаточную функцию динамического звена (рис 3.3) для вертикальной плоскости (3.4)
(3.4)


 (3.5)
(3.5) и
и  - вертикальная и горизонтальная составляющие поперечного ускорения
- вертикальная и горизонтальная составляющие поперечного ускорения  .
. (3.6)
(3.6)
 и
и  - значения углов
- значения углов  в момент определения координат («замораживания» углов).
в момент определения координат («замораживания» углов). , связанными между собой.
, связанными между собой.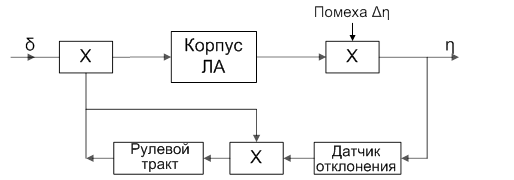
 по тангажу (3.3) или такой же по рысканью -
по тангажу (3.3) или такой же по рысканью -  вид передаточной функции по крену
вид передаточной функции по крену  отличается тем, что это звено стабилизации не входит в контур радиоуправления ЛА (в дальнейшем рассматриваться не будет).
отличается тем, что это звено стабилизации не входит в контур радиоуправления ЛА (в дальнейшем рассматриваться не будет). измеряется потенциометрическим датчиком, корпус которого крепится неподвижно на корпусе ЛА, а движок жёстко связывается с валом руля. При повороте руля, движок поворачивается, и снимаемое напряжения оказывается пропорциональным углу поворота. Датчик отклонения измеряет угловое отклонение ЛА от начальной ориентации.
измеряется потенциометрическим датчиком, корпус которого крепится неподвижно на корпусе ЛА, а движок жёстко связывается с валом руля. При повороте руля, движок поворачивается, и снимаемое напряжения оказывается пропорциональным углу поворота. Датчик отклонения измеряет угловое отклонение ЛА от начальной ориентации. (3.9)
(3.9) - главный момент инерции ротора,
- главный момент инерции ротора,  - угловая скорость вращения.
- угловая скорость вращения. характеризующий положение ЛА в пространстве, необходимо минимум два свободных гироскопа, причём их главные оси не должны совпадать с осями измеряемых поворотов.
характеризующий положение ЛА в пространстве, необходимо минимум два свободных гироскопа, причём их главные оси не должны совпадать с осями измеряемых поворотов.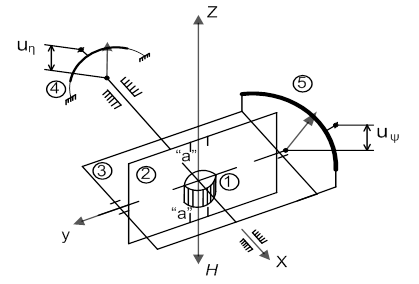
 (или аналогично для
(или аналогично для  и
и  ) (3.10)
) (3.10)