|
|
Траектория движения точки и её перемещениеСтр 1 из 9Следующая ⇒ Основные понятия кинематики и кинематические характеристики Движение человека является механическим, то есть это изменение тела или его частей относительно других тел. Относительное перемещение описывает кинематика. Кинематика – раздел механики, в котором изучается механическое движение, но не рассматриваются причины, вызывающие это движение. Описание движения как тела человека (его частей) в различных видах спорта, так и различных спортивных снарядов являются неотъемлемой частью спортивной биомеханики и в частности кинематики. Какой бы материальный объект или явление мы не рассматривали, окажется что вне пространства и вне времени ничего не существует. Любой предмет имеет пространственные размеры и форму, находится в каком-то месте пространства по отношению к другому предмету. Любой процесс, в котором участвуют материальные объекты, имеет во времени начало и конец, сколько то длится во времени, может совершаться раньше или позже другого процесса. Именно по этому возникает необходимость измерять пространственную и временную протяжённости. Основные единицы измерения кинематических характеристик в международной системе измерений СИ. Пространство. Одна сорокамиллионная часть длины земного меридиана, проходящего через Париж, была названа метром. Поэтому длина измеряется в метрах (м) и кратных ему единицах измерения: километрах (км), сантиметрах (см) и т. д. Время – одно из фундаментальных понятий. Можно сказать, что это то, что отделяет два последовательных события. Один из способов измерить время – это использовать любой регулярно повторяющийся процесс. Одна восьмидесяти шести тысячная часть земных суток была выбрана за единицу времени и была названа секундой (с) и кратных ей единицах (минутах, часах и т. д.). В спорте используются специальные временные характеристики: Момент времени (t) - это временная мера положения материальной точки, звеньев тела или системы тел. Моментами времени обозначают начало и окончание движения или какой либо его части или фазы. Длительность движения (∆t) – это его временная мера, которая измеряется разностью моментов окончания и начала движения ∆t = tкон. – tнач. Темп движения (N) – это временная мера повторности движений, повторяющихся в единицу времени. N = 1/∆t; (1/c) или (цикл/c). Ритм движений – это временная мера соотношения частей (фаз) движений. Он определяется по соотношению длительности частей движения. Положение тела в пространстве определяют относительно некоторой системы отсчёта, которая включает в себя тело отсчёта (то есть относительно чего рассматривается движение) и систему координат, необходимую для описания на качественном уровне положение тела в той или иной части пространства. С телом отсчёта связывают начало и направление измерения. Например, в целом ряде соревнований началом координат можно выбрать положение старта. От него уже рассчитывают различные соревновательные дистанции во всех циклических видах спорта. Тем самым в выбранной системе координат «старт – финиш» определяют расстояние в пространстве, на которое переместится спортсмен при движении. Любое промежуточное положение тела спортсмена во время движения характеризуется текущей координатой внутри выбранного дистанционного интервала. Для точного определения спортивного результата правилами соревнований предусматривается по какой точке (пункт отсчёта) ведётся отсчёт: по носку конька конькобежца, по выступающей точке грудной клетки бегуна-спринтера, или по заднему краю следа приземляющегося прыгуна в длину. В некоторых случаях для точного описания движения законов биомеханики вводится понятие материальная точка. Материальная точка – это тело, размерами и внутренней структурой которого в данных условиях можно пренебречь. Движение тел по характеру и интенсивности могут быть различными. Чтобы охарактеризовать эти различия, в кинематике вводят ряд терминов, представленных ниже. Траектория – линия, описываемая в пространстве движущейся точкой тела. При биомеханическом анализе движений прежде всего рассматривают траектории движений характерных точек человека. Как правило, такими точками являются суставы тела. По виду траектории движений делят на прямолинейные (прямая линия) и криволинейные (любая линия, отличная от прямой). Перемещение – это векторная разность конечного и начального положения тела. Следовательно, перемещение характеризует окончательный результат движения. Путь – это длина участка траектории, пройденной телом или точкой тела за выбранный промежуток времени. КИНЕМАТИКА ТОЧКИ Введение в кинематику
Кинематикой называют раздел теоретической механики, в котором изучается движение материальных тел с геометрической точки зрения независимо от приложенных сил. Положение движущегося тела в пространстве всегда определяется по отношению к любому другому неизменяемому телу, называемому телом отсчета. Система координат, неизменно связанная с телом отсчета, называется системой отсчета. В механике Ньютона время считается абсолютным и не связанным с движущейся материей. В соответствии с этим оно протекает одинаково во всех системах отсчета независимо от их движения. Основной единицей измерения времени является секунда (с). Если положение тела по отношению к выбранной системе отсчета с течением времени не изменяется, то говорят, что тело относительно данной системы отсчета находится в покое. Если же тело изменяет свое положение относительно выбранной системы отсчета, то говорят, что оно движется по отношению к этой системе. Тело может находиться в состоянии покоя по отношению к одной системе отсчета, но двигаться (и притом совершенно различным образом) по отношению к другим системам отсчета. Например, пассажир, неподвижно сидящий на скамье движущегося поезда, покоится относительно системы отсчета, связанной с вагоном, но движется по отношению к системе отсчета, связанной с Землей. Точка, лежащая на поверхности катания колеса, движется по отношению к системе отсчета, связанной с вагоном, по окружности, а по отношению к системе отсчета, связанной с Землей, по циклоиде; та же точка покоится по отношению к системе координат, связанной с колесной парой. Таким образом, движение или покой тела могут рассматриваться лишь по отношению к какой-либо выбранной системе отсчета. Задать движение тела относительно какой-либо системы отсчета - значит дать функциональные зависимости, с помощью которых можно определить положение тела в любой момент времени относительно этой системы. Различные точки одного и того же тела по отношению к выбранной системе отсчета движутся по-разному. Например, по отношению к системе, связанной с Землей, точка поверхности катания колеса движется по циклоиде, а центр колеса - по прямой. Поэтому изучение кинематики начинают с кинематики точки.
§ 2. Способы задания движения точки
Движение точки может быть задано тремя способами: естественным, векторным и координатным. При естественном способе задания движения дается траектория, т. е. линия, по которой движется точка (рис.2.1).
Это равенство называется уравнением движения точки по данной траектории. Итак, движение точки в рассматриваемом случае определяется совокупностью следующих данных: траектории точки, положения начала отсчета дуговой координаты, положительного и отрицательного направлений отсчета и функции
Это равенство называется векторным уравнением движения точки.
Эти равенства называются уравнениями движения точки в прямоугольных декартовых координатах. Движение точки в плоскости определяется двумя уравнениями системы (2.3), прямолинейное движение — одним. Между тремя описанными способами задания движения существует взаимная связь, что позволяет от одного способа задания движения перейти к другому. В этом легко убедиться, например, при рассмотрении перехода от координатного способа задания движения к векторному. Положим, что движение точки задано в виде уравнений (2.3). Имея в виду, что
и
можно записать
А это и есть уравнение вида (2.2). Задача 2.1. Найти уравнение движения и траекторию средней точки
Тогда из
Подставляя значения
или
Чтобы найти уравнение траектории точки в явной форме, надо исключить из уравнений движения время
Возводя в квадрат и складывая левые и правые части этих уравнений, получим уравнение траектории в виде
Следовательно, траектория точки Ползун
или
Скорость и ускорение
Скорость точки В предыдущей статье движение тела или точки определено, как изменение положения в пространстве с течением времени. Для того чтобы более полно охарактеризовать качественные и количественные стороны движения введены понятия скорости и ускорения. Скорость – это кинематическая мера движения точки, характеризующая быстроту изменения ее положения в пространстве.
Как известно из физики, при равномерном движении скорость может быть определена длиной пути, пройденного за единицу времени: v = s/t = const (предполагается, что начало отсчета пути и времени совпадают). Единица скорости в системе СИ определяется соотношением длина/время, т. е. м/с. Очевидно, что при криволинейном движении скорость точки будет меняться по направлению. При неравномерном движении точки модуль ее скорости с течением времени меняется.
Если за небольшой промежуток времени Δt точка прошла путь Δs, то ее средняя скорость равна: vср = Δs/Δt. Средняя скорость не дает представления об истинной скорости в каждый данный момент времени (истинную скорость иначе называют мгновенной). Очевидно, что чем меньше промежуток времени, за который определяется средняя скорость, тем ближе ее значение будет к мгновенной скорости. Истинная (мгновенная) скорость есть предел, к которому стремится средняя скорость при Δt, стремящемся к нулю: v = lim vср при t→0 или v = lim (Δs/Δt) = ds/dt. Таким образом, числовое значение истинной скорости равно v = ds/dt. При Δt стремящемся к нулю, Δs тоже стремится к нулю, и, как мы уже выяснили, вектор скорости будет направлен по касательной (т. е. совпадает с вектором истинной скорости v). Из этого следует, что предел вектора условной скорости vп, равный пределу отношения вектора перемещения точки к бесконечно малому промежутку времени, равен вектору истинной скорости точки. *** Рис.1
Рассмотрим пример. Если диск, не вращаясь, может скользить вдоль неподвижной в данной системе отсчета оси (рис.1, а), то в данной системе отсчета он, очевидно, обладает только одной степенью свободы - положение диска однозначно определяется, скажем, координатой x его центра, отсчитываемой вдоль оси. Но если диск, кроме того, может еще и вращаться (рис.1, б), то он приобретает еще одну степень свободы - к координате x добавляется угол поворота φ диска вокруг оси. Если ось с диском зажата в рамке, которая может поворачиваться вокруг вертикальной оси (рис.1, в), то число степеней свободы становится равным трем – к x и φ добавляется угол поворота рамки ϕ. Свободная материальная точка в пространстве имеет три степени свободы: например декартовы координаты x, y и z. Координаты точки могут определяться также в цилиндрической (r, 𝜑, z) и сферической (r, 𝜑, 𝜙) системах отсчета, но число параметров, однозначно определяющих положение точки в пространстве всегда три. Материальная точка на плоскости имеет две степени свободы. Если в плоскости выбрать систему координат xОy, то координаты x и y определяют положение точки на плоскости, акоордината z тождественно равна нулю. Свободная материальная точка на поверхности любого вида имеет две степени свободы. Например: положение точки на поверхности Земли определяется двумя параметрами: широтой и долготой. Материальная точка на кривой любого вида имеет одну степень свободы. Параметром, определяющим положение точки на кривой, может быть, например, расстояние вдоль кривой от начала отсчета. Рассмотрим две материальные точки в пространстве, соединенные жестким стержнем длины l (рис.2). Положение каждой точки определяется тремя параметрами, но на них наложена связь.
Рис.2
Уравнение l 2=(x2-x1)2+(y2-y1)2+(z2-z1)2 является уравнением связи. Из этого уравнения любая одна координата может быть выражена через остальные пять координат (пять независимых параметров). Поэтому эти две точки имеют (2∙3-1=5) пять степеней свободы. Рассмотрим три материальные точки в пространстве, не лежащие на одной прямой, соединенные тремя жесткими стержнями. Число степеней свободы этих точек равно (3∙3-3=6) шести. Свободное твёрдое тело в общем случае имеет 6 степеней свободы. Действительно, положение тела в пространстве относительно какой-либо системы отсчета, определяется заданием трех его точек, не лежащие на одной прямой, и расстояния между точками в твердом теле остаются неизменными при любых его движениях. Согласно выше сказанному, число степеней свободы должно быть равно шести. Поступательное движение В кинематике, как и в статистике, будем рассматривать все твердые тела как абсолютно твердые. Абсолютно твердым телом называется материальное тело, геометрическая форма которого и размеры не изменяются ни при каких механических воздействиях со стороны других тел, а расстояние между любыми двумя его точками остается постоянным. Кинематика твердого тела, также как и динамика твердого тела, является одним из наиболее трудных разделов курса теоретической механики. Задачи кинематики твердого тела распадаются на две части: 1) задание движения и определение кинематических характеристик движения тела в целом; 2) определение кинематических характеристик движения отдельных точек тела. Существует пять видов движения твердого тела: 1) поступательное движение; 2) вращение вокруг неподвижной оси; 3) плоское движение; 4) вращение вокруг неподвижной точки; 5) свободное движение. Первые два называются простейшими движениями твердого тела. Начнем с рассмотрения поступательного движения твердого тела. Поступательным называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему начальному направлению. Поступательное движение не следует смешивать с прямолинейным. При поступательном движении тела траектории его точек могут быть любыми кривыми линиями. Приведем примеры. 1. Кузов автомобиля на прямом горизонтальном участке дороги движется поступательно. При этом траектории его точек будут прямыми линиями. 2. Спарник АВ (рис.3) при вращении кривошипов O1A и O2B также движется поступательно (любая проведенная в нем прямая остается параллельной ее начальному направлению). Точки спарника движутся при этом по окружностям.
Рис.3
Поступательно движутся педали велосипеда относительно его рамы во время движения, поршни в цилиндрах двигателя внутреннего сгорания относительно цилиндров, кабины колеса обозрения в парках (рис.4) относительно Земли.
Рис.4
Свойства поступательного движения определяются следующей теоремой: при поступательном движении все точки тела описывают одинаковые (при наложении совпадающие) траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения. Для доказательства рассмотрим твердое тело, совершающее поступательное движение относительно системы отсчета Oxyz. Возьмем в теле две произвольные точки А и В, положения которых в момент времени t определяются радиусами-векторами
Рис.5 Проведем вектор Тогда При этом длина АВ постоянна, как расстояние между точками твердого тела, а направление АВ остается неизменным, так как тело движется поступательно. Таким образом, вектор АВ во все время движения тела остается постоянным (AB =const). Вследствие этого, траектория точки В получается из траектории точки А параллельным смещением всех ее точек на постоянный вектор Для нахождения скоростей точек А и В продифференцируем обе части равенства по времени. Получим
Но производная от постоянного вектора АВ равна нулю. Производные же от векторов
т.е. что скорости точек А и В тела в любой момент времени одинаковы и по модулю, и по направлению. Беря от обеих частей полученного равенства производные по времени:
Следовательно, ускорения точек А и В тела в любой момент времени тоже одинаковы по модулю и направлению. Так как точки А и В были выбраны произвольно, то из найденных результатов следует, что у всех точек тела их траектории, а также скорости и ускорения в любой момент времени будут одинаковы. Таким образом, теорема доказана. Из теоремы следует, что поступательное движение твердого тела определяется движением какой-нибудь одной из его точки. Следовательно, изучение поступательного движения тела сводится к задаче кинематике точки, нами уже рассмотренной. При поступательном движении общую для всех точек тела скорость Заметим, что понятие о скорости и ускорении тела имеют смысл только при поступательном движении. Во всех остальных случаях точки тела, как мы увидим, движутся с разными скоростями и ускорениями, и термины <<скорость тела>> или <<ускорение тела>> для этих движений теряют смысл.
Рис.6
За время ∆t тело, двигаясь из точки А в точку В, совершает перемещение Радиус-вектор поворачивается на угол ∆φ. Угол выражают в радианах. Скорость
Скалярная физическая величина, численно равная отношению угла поворота радиуса-вектора к промежутку времени, за который этот поворот произошел, называется угловой скоростью:
В СИ единицей угловой скорости является радиан в секунду При равномерном движении по окружности угловая скорость и модуль линейной скорости — величины постоянные: ω=const; v=const. Положение тела можно определить, если известен модуль радиуса- вектора φ=φ0+ωt Оно позволяет определить положение тела в любой момент времени t. Учитывая, что
Промежуток времени Т, в течение которого тело совершает один полный оборот, называется периодом вращения:
За время ∆t=Т тело проходит путь l =2πR. Следовательно,
Величина ϑ, обратная периоду, показывающая, сколько оборотов совершает тело за единицу времени, называется частотой вращения:
Следовательно,
Рис.7
По определению среднего ускорения Из подобия Тогда Мгновенное ускорение
β — угол между
При ∆t→0 угол ∆φ→0 и, следовательно, β→90°. Перпендикуляром к касательной к окружности является радиус. Следовательно,
Модуль
Рис.8
Рис.9 Тогда положение тела в любой момент времени однозначно определится взятым с соответствующим знаком углом φ между этими полуплоскостями, который назовем углом поворота тела. Будем считать угол φ положительным, если он отложен от неподвижной плоскости в направлении против хода часовой стрелки (для наблюдателя, смотрящего с положительного конца оси Az), и отрицательным, если по ходу часовой стрелки. Измерять угол φ будем всегда в радианах. Чтобы знать положение тела в любой момент времени, надо знать зависимость угла φ от времени t, т.е. φ=f(t). Уравнение выражает закон вращательного движения твердого тела вокруг неподвижной оси. При вращательном движении абсолютно твердого тела вокруг неподвижной оси углы поворота радиуса-вектора различных точек тела одинаковы. Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость ω и угловое ускорение ε. Если за промежуток времени ∆t=t1-t тело совершает поворот на угол ∆φ=φ1-φ, то численно средней угловой скоростью тела за этот промежуток времени будет
Таким образом, числовое значение угловой скорости тела в данный момент времени равно первой производной от угла поворота по времени. Знак ω определяет направление вращения тела. Легко видеть, что когда вращение происходит против хода часовой стрелки, ω>0, а когда по ходу часовой стрелки, то ω<0. Размерность угловой скорости 1/Т (т.е. 1/время); в качестве единицы измерения обычно применяют рад/с или, что тоже, 1/с (с-1), так как радиан - величина безразмерная. Угловую скорость тела можно изобразить в виде вектора
Рис.10
Угол поворота и угловая скорость характеризуют движение всего абсолютно твердого тела в целом. Линейная скорость какой-либо точки абсолютно твердого тела пропорциональна расстоянию точки от оси вращения:
При равномерном вращении абсолютно твердого тела углы поворота тела за любые равные промежутки времени одинаковы, тангенциальные ускорения у различных точек тела отсутствуют, а нормальное ускорение точки тела зависит от ее расстояния до оси вращения:
Вектор Угловое ускорение характеризует изменение с течением времени угловой скорости тела. Если за промежуток времени ∆t=t1-t угловая скорость тела изменяется на величину ∆ω=ω1-ω, то числовое значение среднего углового ускорения тела за этот промежуток времени будет
Таким образом, числовое значение углового ускорения, тела в данный момент времени равно первой производной от угловой скорости или второй производной от угла поворота тела по времени. Размерность углового ускорения 1/T2 (1/время2); в качестве единицы измерения обычно применяется рад/с2 или, что то же, 1/с2 (с-2). Если модуль угловой скорости со временем возрастает, вращение тела называется ускоренным, а если убывает, - замедленным. Легко видеть, что вращение будет ускоренным, когда величины ω и εимеют одинаковые знаки, и замедленным, - когда разные. Угловое ускорение тела (по аналогии с угловой скоростью) можно также изобразить в виде вектора ε, направленного вдоль оси вращения. При этом
Направление ε совпадает с направлением ω, когда тело вращается ускоренно и (рис.10,а), противоположно ω при замедленном вращении (рис.10,б).
Рис.11 Рис. 12 2. Ускорения точек тела. Для нахождения ускорения точки М воспользуемся формулами
В нашем случае ρ=h. Подставляя значение v в выражения aτ и an, получим:
или окончательно:
Касательная составляющая ускорения aτ направлена по касательной к траектории (в сторону движения при ускоренном вращении тела и в обратную сторону при, замедленном); нормальная составляющая an всегда направлена по радиусу МС к оси вращения (рис.12). Полное ускорение точки М будет
Отклонение вектора полного ускорения от радиуса описываемой точкой окружности определяется углом μ, который вычисляется по формуле
Подставляя сюда значения aτ и an, получаем
Так как ω и ε имеют в данный момент времени для всех точек тела одно и то же значение, то ускорения всех точек вращающегося твердого тела пропорциональны их расстояниям от оси вращения и образуют в данный момент времени один и тот же угол μ с радиусами описываемых ими окружностей. Поле ускорений точек вращающегося твердого тела имеет вид, показанный на рис.14.
Рис.13 Рис.14
3. Векторы скорости и ускорения точек тела. Чтобы найти выражения непосредственно для векторов v и a, проведем из произвольной точки О оси АВ радиус-вектор
 Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 На этой траектории выбирается некоторая точка
На этой траектории выбирается некоторая точка  , принимаемая за начало отсчета. Выбираются положительное и отрицательное направления отсчета дуговой координаты
, принимаемая за начало отсчета. Выбираются положительное и отрицательное направления отсчета дуговой координаты  , определяющей положение точки на траектории. При движении точки расстояние
, определяющей положение точки на траектории. При движении точки расстояние  . (2.1)
. (2.1) При векторном способе задания движения точки положение точки
При векторном способе задания движения точки положение точки  определяется величиной и направлением радиуса-вектора
определяется величиной и направлением радиуса-вектора  , проведенного из неподвижного центра
, проведенного из неподвижного центра  . (2.2)
. (2.2) При координатном способе задания движения положение точки по отношению к выбранной системе отсчета определяется при помощи прямоугольной системы декартовых координат (рис. 2.3). При движении точки ее координаты изменяются с течением времени. Поэтому, чтобы определить положение точки в любой момент времени, достаточно задать координаты
При координатном способе задания движения положение точки по отношению к выбранной системе отсчета определяется при помощи прямоугольной системы декартовых координат (рис. 2.3). При движении точки ее координаты изменяются с течением времени. Поэтому, чтобы определить положение точки в любой момент времени, достаточно задать координаты  ,
,  ,
,  как функции времени:
как функции времени: ;
;  ;
;  . (2.3)
. (2.3)
 ;
;  ;
;  ,
, .
. кривошипно-ползунного механизма (рис. 2.4), если
кривошипно-ползунного механизма (рис. 2.4), если  ;
;  .
. Решение. Положение точки
Решение. Положение точки  . Из рис. 2.4 видно, что
. Из рис. 2.4 видно, что ,
,  .
. и
и  :
: ;
;  ;
;  .
. ,
,  и
и  ;
; 
 ;
;  .
. . С этой целью проведем необходимые преобразования в полученных выше уравнениях движения:
. С этой целью проведем необходимые преобразования в полученных выше уравнениях движения: ;
;  .
. .
.
 .
.



 и
и  (рис.5).
(рис.5).
 , соединяющий эти точки.
, соединяющий эти точки.

 называют скоростью поступательного движения тела, а ускорение
называют скоростью поступательного движения тела, а ускорение  - ускорением поступательного движения тела. Векторы
- ускорением поступательного движения тела. Векторы  , равное хорде АВ, и проходит путь, равный длине дуги l.
, равное хорде АВ, и проходит путь, равный длине дуги l.

 .
. и угол φ, который он составляет с осью Ох (угловая координата). Если в начальный момент времени t0=0 угловая координата равна φ0, а в момент времени t она равна φ, то угол поворота ∆φ радиуса-вектора за время ∆t=t-t0 равен ∆φ=φ-φ0. Тогда из последней формулы можно получить кинематическое уравнение движения материальной точки по окружности:
и угол φ, который он составляет с осью Ох (угловая координата). Если в начальный момент времени t0=0 угловая координата равна φ0, а в момент времени t она равна φ, то угол поворота ∆φ радиуса-вектора за время ∆t=t-t0 равен ∆φ=φ-φ0. Тогда из последней формулы можно получить кинематическое уравнение движения материальной точки по окружности: , получаем:
, получаем:
 — формула связи между линейнойи угловой скоростью.
— формула связи между линейнойи угловой скоростью.

 .
. . Треугольники ОАВ и ВСD — равнобедренные (рис. 7). Углы при вершинах — одинаковые (как углы с соответственно перпендикулярными сторонами). Отсюда следует, что ∆ОАВ подобен ΔВСD.
. Треугольники ОАВ и ВСD — равнобедренные (рис. 7). Углы при вершинах — одинаковые (как углы с соответственно перпендикулярными сторонами). Отсюда следует, что ∆ОАВ подобен ΔВСD.


 и
и  —внешний по отношению к ΔВСD:
—внешний по отношению к ΔВСD:

 , направление
, направление 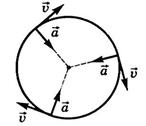
 . В пределе при ∆t→0 найдем, что
. В пределе при ∆t→0 найдем, что или ω=
или ω=  .
. , модуль которого равен |
, модуль которого равен | 

 направлен по радиусу траектории точки к оси вращения.
направлен по радиусу траектории точки к оси вращения. . В пределе при ∆t→0 найдем,
. В пределе при ∆t→0 найдем,