|
|
Корректирующие устройства и их применениеКачество процессов регулирования может быть улучшено путем применения более сложного закона регулирования (например, ПИ- вместо И- закона, ПИД- вместо ПИ-закона) и расчета настроек регулятора, обеспечивающих заданные или оптимальные характеристики переходного процесса. В статических системах стабилизации с П- и ПД- регуляторами точность может быть повышена путем увеличения коэффициента передачи регулятора. Введение в закон регулирования интегральной составляющей позволяет получить регулирование без статической ошибки. Качество переходного процесса в динамике может быть дополнительно улучшено введением в закон регулирования дифференциальной составляющей. Однако в некоторых случаях усложнением закона регулирования по основному контуру и расчетам соответствующих коэффициентов закона регулирования невозможно добиться требуемого качества переходных процессов. Тогда приходится применять дополнительные меры улучшения процесса, одним из которых является введение корректирующих звеньев. Рассмотрим этот способ на конкретном примере. Ко многим автомобильным и тракторным приводам (привод сцепления, тормозной привод и др.) наряду с общими требованиями предъявляются два специфических требования: быстродействие и следящее действие. Быстродействие (быстрота протекания переходного процесса) характеризуется временем нарастания давления в исполнительном органе до 0,9ртк,отсчитываемым от момента начала резкого перемещения органа управления. Под следящим действием понимается способность привода или системы обеспечивать в установившемся режиме пропорциональное изменение выходного сигнала при произвольном изменении входного. Быстродействие является одним из показателей качества переходного процесса в системе и сильно влияет на эффективность работы многих систем. Основными способами повышения быстродействия и синхронности работы следящих приводов являются: 1) выбор оптимальных проходных сечений трубопроводов, аппаратов привода и их рациональное расположение; 2) использование в цели дополнительных ускорительных клапанов (каскадов усиления); 3) применение различного вида корректирующих устройств; 4) применение электропневматических или электрогидравлических приводов, в которых командные сигналы передаются с помощью электрических цепей, а силовые функции выполняются пневматическими или гидравлическими устройствами. Применение корректирующих устройств (КУ) является перспективным способом повышения быстродействия следящих приводов. Достоинством большинства КУ является то, что они не требуют значительных усложнений конструкции привода и позволяют существенно повысить быстродействие существующей системы без ухудшения ее статических характеристик и, следовательно, следящего действия. В теории следящих систем под коррекцией понимается замена исходной передаточной функции разомкнутой цепи другой передаточной функцией, соответствующей лучшему качеству системы управления. В применении к пневматическим и гидравлическим системам управления под коррекцией будем понимать использование дополнительных устройств, изменяющих структуру и улучшающих динамические качества (быстродействие) системы. В реальных приводах обычно получается существенное отставание изменяющегося во времени выходного сигнала у от сигнала на входе х. Если tex - время изменения входного сигнала и tвыx - время изменения выходного сигнала на 0,9 уmax, то разность Δt = tвx ― tвыx, при положительном Δt называется временем предварения. Если же эта разность отрицательна, (tвых > tвx), Δt называют временем отставания (запаздывания) выходного сигнала у от входного х. На графике (рис. 8.1, а) сплошная кривая изображает запаздывание сигнала, что имеет место в обычных приводах. Штриховая линия показывает предварение выходного сигнала после форсирования привода применением КУ. Из графика видно, что значительное опережение получается при быстром изменении воздействий на входе, т.е. при малых значениях tвx, а при медленном изменении входного сигнала эффект опережения исчезает - штриховая линия по мере увеличения tex приближается к сплошной кривой По способу включения в систему КУ подразделяются на устройства последовательного типа (рис. 8.1, б), параллельного (рис. 8.1, в) типа местной. обработки связи (рис. 8.1, г).
Рис. 8.1- Подключение корректирующих устройств: А-график эффективности; Б, В, Г - структурные схемы
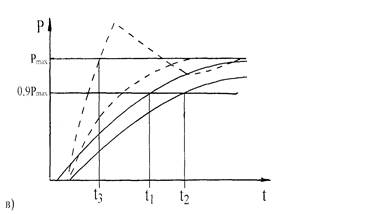
Где Wk(P) означает передаточную функцию основной цепи, W(P) передаточную функцию корректирующего звена. Целесообразность того или иного способа включения КУ в систему определяется удобством технического осуществления и эффективностью действия устройства. Последовательные КУ. Пусть имеется простейшая цепь, представляющая собой апериодическое звено 1-го порядка. Для повышения быстродействия этой цепи включается последовательно дифференцирующее звено. Результирующая передаточная функция W рез =WWк =k/ (1+ Тр)· Ткр kкр = kТбр/(Тр+ 1 ) Члены знаменателя, содержащие р характеризуют запаздывание сигнала на выходе по отношению к выходному сигналу, а члены числителя с р, наоборот— опережение. Следовательно, по виду передаточной функции можно судить о структуре исследуемой цели. Если в числителе и знаменателе результирующей передаточной функции, полученной в результате подключения КУ по одной из схем показанных на рис. 5.12, имеются члены с р, то подбором kк и ТкР можно достигнуть эффекта опережения, так и запаздывания в цепи. Если же в результирующей передаточной функции члены с р имеются только в знаменателе, цепь во всех случаях работает с отставанием. Сущность последовательного включения КУ рассмотрим на схеме рис. 8.2. Воздух под давлением поступает от следящего крана управления 1 по магистрали 2 к исполнительному органу 3 (рис. 8.2, а). При этом давление р ] на выходе крана управления 1 нарастает по кривой 10, а в исполнительном органе 3- по кривой 11 (рис. 8.2, в). В результате последовательного включения КУ (дифференцирующего звена 7) существенно повышается скорость наполнения воздухом исполнительного органа 3, так как цилиндр 3 соединен с близко расположенным к нему ресивером 4 (рис. 8.2, б). Такое соединение осуществляется с помощью поршня 6. Когда оказывается воздействие на кран управления 1, сжатый воздух поступает в магистраль 2, а так же по магистрали 5- в полость А. Полости А и Б соединяются дросселем, вследствие чего создается разница давлений в полостях А и Б и поршень 6 перемещается вниз, открывая полностью клапан 8. С течением времени давление в надпоршневой А и подпоршневой Б полостях выравнивается и под действием пружины поршень 6 и клапан 8 перемещаются вверх, а исполнительный орган 3 соединяется с магистралью 2. Далее управление давлением в исполнительном органе 3 осуществляется с помощью крана 1, как в обычном приводе без КУ (см. рис. 5.13, а). Таким образом, переходная характеристика привода с КУ (штриховая кривая 9, см. рис. 5.13, в) существенно улучшается- повышается быстродействие привода при той же характеристике 10 нарастания давления на выходе из крана 1 (см. рис. 8.2, б).
Рис.8.2 - Схемы цепей управления: а- без КУ; б- с последовательным КУ; в- динамические характеристики
Чем меньше проходное сечение дросселя в канале, соединяющем А и Б, и чем больше объем полости Б, тем позже возвращается клапан 8 в исходное положения и, следовательно, тем больший эффект действия КУ. Очевидно, что время опережения Δ t = t1 – t2 различно при разных темпах воздействия на кран 1, при более медленных воздействиях Δt уменьшается и динамическая характеристика привода с КУ приближается к характеристике исходного привода (кривые 10 и 11). При медленных процессах управления КУ не срабатывает вследствие равенства давлений в полостях А и Б дифференцирующего устройства и действие КУ на проявляется. Таким образом, КУ не влияет на следящее и на работу привода при медленных процессах управления, корректирует (улучшает) лишь динамическую характеристику. Параллельные КУ. Это дополнительная корректирующая цепь, включаемая параллельно основной рабочей цепи привода. НА вход основной и корректирующей цепей поступает сигнал от крана управления, Выходные сигналы обеих цепей складываются или же осуществляется действие лишь той цепи, у которой сигнал на выходе больше. Параллельная корректирующая цепь не форсирует сигнала основной цепи, а в отличие от последовательных КУ вырабатывает дополнительный сигнал в соответствии с законом изменения входного сигнала. Поскольку целью применения рассматриваемых КУ является повышение быстродействия и синхронности работы следящих приводов, действие параллельной корректирующей цепи, подобно последовательным КУ, проявляется только в переходном режиме. В результате изменяется структура (динамические качества) следящей системы. На рис. 8.3 приведены схемы отдельного контура следящего привода с параллельными корректирующими цепями. Привод состоит из следящего крана управления 1, основной магистрали 3 и исполнительного органа 4 с поршнем 5. Пневматическая корректирующая цепь состоит из дифференцирующего устройства 8 с подключенной к нему питающей магистралью 9 и дополнительного цилиндра с поршнем 6. Полость А дифференцирующего устройства подключается трубкой 2 к основной магистрали 3 (место подключения выбирается расчетным или экспериментальным путем).
Рис. 8.3 - Схема цепи параллельным корректирующим устройством. W(р) = k/ (1+ Тр ) + Тбкр/ 1 W(р) = k/ (1+ Тр)+ Тбр/Ткр +1= Т· Тбр2+ Тбр + k/ (Тр+1) Корректирующая цепь (рис. 8.3, а) работает следующим образом. При воздействии на кран управления повышается давление в магистрали 3 и в полости Г цилиндра 4, причем давление в полости Г изменяется с запаздыванием по сравнению с ростом давления на выходе из крана 1. Это запаздывание зависит от сопротивления магистрали 3, объема полости Г, темпа перемещения органа управления. Интенсивное возрастание давления в начале магистрали 3 и, следовательно, в полости А дифференцирующего устройства 8, вызывает его срабатывание, в результате чего сжатый воздух подается по магистрали 7 в полость В дополнительного цилиндра- силовое воздействие и перемещение исполнительного органа резко возрастают. Дополнительное воздействие КУ осуществляется до тех пор, пока не уравняются давления в полостях А и Б дифференцирующего устройства 8, после этого под действием пружины поршень и клапан возвращаются в исходное положение и магистраль 7 КУ сообщается с атмосферой. Время выдержки давления в трубопроводе 7 и в полости В зависит в основном от сопротивления дросселя, объема полости Б и силы пружины дифференцирующего устройства 8. Возможен вариант исполнительного органа с одним поршнем. В таком случае корректирующая параллельная цепь подключается к основной рабочей полости Г исполнительного органа, воздействия давлений в основной и корректирующей цепи не складываются, как в предыдущий схеме, а в исполнительном органе реализуется давление лишь той цепи, в которой оно больше. КУ в виде обратных связей. Эти КУ в отличие от рассмотренных ранее последовательных и параллельных обеспечивают повышение быстродействия следящего аппарата или цепи за счет полного открытия клапана следящих аппаратов и выдержки его в таком положении некоторое время, по истечении которого действие КУ прекращается. Таким образом, при применении КУ в обратной связи следящего аппарата улучшаются его динамические качества без нарушения следящего действия. Схема цепи с корректирующим устройством в линии обратной связи представлены на рисунке 8.4.
Рисунок КУ в виде гибкой положительной обратной связи. Гибкая обратная связь действует только в переходном процессе. При охвате периодического звена 1-го порядка гибкой безинерционной дифференцированной связью с передаточной функцией. W(р) = Тбр
W(р) =(k/ (1+ Тр)) / ( 1+k Тбр/Тр )= k /(Тр - k Тбр + 1)=k/((Тр- k Тбр) р + 1) Жесткая безинерционная связь действует как в переходном, так и в установившемся процессе. Она обеспечивает смещение выходного давления за давлением на входе, однако скорость применения выходного давления меньше скорости на входе. Если с целью повышения быстродействия привода требуется форсирование следящего аппарата можно использовать вместо безинерционной инерционную жесткую положительную обратную связь. Достоинства типа обратной связи корректирующего устройства наиболее эффективно проявляются лишь при правильном выборе места включения их в приводе.   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|