
|
|
Структурный анализ механизмов (техническая механика)Стр 1 из 17Следующая ⇒ КОНСПЕКТ ЛЕКЦИЙ По дисциплине «Техническая механика» для студентов направления подготовки 6.070101 «Транспортные технологии» специальностей: «Организация перевозок и управление на транспорте» «Транспортные системы» «Организация перевозок и управление на автомобильном транспорте» специализаций: «Организация международных перевозок» «Организация таможенного контроля» дневной, заочной и дистанционной форм обучения Составил доцент, канд. техн. Наук Пирч Игорь Иванович
Мариуполь, 2016г. Содержание Часть первая………………………………………………………………………………….1 1. Структурный анализ механизмов (техническая механика)………………………...1 1.1. Кинематическая пара……………………………………………………….....1 1.2. Кинематическая цепь…………………………………………………………4 1.3. Механизмы…………………………………………………………………….6 2. Кинематические характеристики механизмов……………………………………..10 2.1. Способы задания движения точки………………………………………….10 2.2. Вращательное движение твердого тела…………………………………….14 3. ОСНОВЫ РАСЧЕТОВ НА ПРОЧНОСТЬ………………………………………….19 3.1. Основные понятия сопротивления материалов……………………………19 3.2. Деформация растяжения (сжатия).Расчеты на прочность и жесткость при растяжении……………………………………………………………...22 3.3 Механические свойства материалов……………………………………........23 Часть вторая……………………………………………………………………………….....28 1. Материалы для металлических конструкций и деталей машин…………………..28 1.1. Химический состав стали……………………………………………………28 1.2. Характеристики механических свойств стали……………………………..29 1.3. Материал соединений………………………………………………………..33 Часть третья…………..………………………………………………………………...…...34 1. ОСНОВНЫЕ ПОЛОЖЕНИЯ………………………………………………………..34 1.1. Общие сведения……………………………………………………………...34 1.2. Современные направления в развитии машиностроения…………………39 1.3. Требования к машинам и деталям…………………………………………..36 1.4. Надежность машин…………………………………………………………..37 1.5. Циклы напряжений в деталях машин………………………………………38 1.6. Усталость материалов деталей машин……………………………………..39 1.7. Предел выносливости материалов………………………………………….40 1.8. Местные напряжения в деталях машин…………………………………….41 1.9. Коэффициенты запаса прочности…………………………………………..44 1.10. Контактная прочность деталей машин…………………………………....46 ЧАСТЬ ЧЕТВЕРТАЯ……………..………………………………………………………...51 МЕХАНИЧЕСКИЕ ПЕРЕДАЧИ……………………………..……………………………51 ГЛАВА 1. ОБЩИЕ СВЕДЕНИЯ О ПЕРЕДАЧАХ…………………………………...51 1.1. Назначения передач и их классификация………………………………….51 1.2. Основные кинематические и силовые соотношения в передачах………..52 ГЛАВА 2. ФРИКЦИОННЫЕ ПЕРЕДАЧИ……………………………………………55 2.1. Общие сведения……………………………………………………………...55 2.2. Материалы катков……………………………………………………………56 2.3. Виды разрушения рабочих поверхностей фрикционных катков…………57 2.4. Цилиндрическая фрикционная передача…………………………………...58 2.5. Вариаторы…………………………………………………………………….59 2.6. Расчет на прочность и к.п.д. фрикционных передач………………………61 ГЛАВА 3. ОСНОВНЫЕ ПОНЯТИЯ О ЗУБЧАТЫХ ПЕРЕДАЧАХ………………..62 3.1. Общие сведения……………………………………………………………...62 3.2. Основы теории зубчатого зацепления……………………………………...66 3.3. Образование цилиндрического зубчатого колеса…………………………67 3.4. Изготовление зубчатых колес………………………………………………68 3.5. Основные элементы и характеристики эвольвентного зацепления………70 3.6. Влияние числа зубьев на форму и прочность зуба………………………...71 3.7. Точность зубчатых передач…………………………………………………73 3.8. Смазывание и к.п.д. зубчатых передач……………………………………..73 3.9. Материалы зубчатых колес………………………………………………….74 3.10. Виды разрушения зубьев и критерии работоспособности зубчатых передач………………………………………………………………………78 ГЛАВА 4. ЦИЛИНДРИЧЕСКИЕ ПРЯМОЗУБЫЕ ПЕРЕДАЧИ…………………….81 4.1. Общие сведения……………………………………………………………...81 4.2. Силы в зацеплении прямозубых передач…………………………………..82 ГЛАВА 5. ЦИЛИНДРИЧЕСКИЕ КОСОЗУБЫЕ ПЕРЕДАЧИ………………………84 5.1. Общие сведения……………………………………………………………...84 5.2. Силы в зацеплении…………………………………………………………..86 5.3. Шевронные цилиндрические передачи…………………………………….87 ГЛАВА 6. РЕДУКТОРЫ……………………………………………………………….88 6.1. ОБЩИЕ СВЕДЕНИЯ………………………………………………………..88 6.2. КЛАССИФИКАЦИЯ РЕДУКТОРОВ………………………………………89 6.3. ЗУБЧАСТЫЕ РЕДУКТОРЫ………………………………………………...91 6.4. ЧЕРВЯЧНЫЕ РЕДУКТОРЫ………………………………………………..92 Часть пятая…………..……………………………………………………………………...94 ГЛАВА 3. ШПОНОЧНЫЕ СОЕДИНЕНИЯ…………………………………………..94 3.1. Общие сведения……………………………………………………………...94 3.2. Разновидность шпоночных соединений……………………………………94 3.3. Расчет шпоночных соединений……………………………………………..98 3.4. Рекомендации по конструированию шпоночных соединений…………..101 ГЛАВА 4. ШЛИЦЕВЫЕ СОЕДИНЕНИЯ…………………………………………...102 4.1. Общие сведения…………………………………………………………….102 4.2. Разновидность шлицевых соединений……………………………………103 4.3. Расчет шлицевых соединений……………………………………………..105 Часть шестая…………………………………..…………………………………………...106 ГЛАВА 1. ВАЛЫ И ОСИ……………………………………………………………..106 1.1. Общие сведения…………………………………………………………….106 1.2. Конструктивные элементы. Материалы валов и осей …………………..107 1.3. Критерии работоспособности валов и осей………………………………109 1.4. Проектировочный расчет валов…………………………………………...109 1.5. Проверочный расчет валов………………………………………………...110 ГЛАВА 2. Подшипники скольжения………………………………………………...112 2.1. Общие сведения…………………………………………………………….112 2.2. Виды смазки………………………………………………………………...114 2.3. Материалы вкладышей……………………………………………………..116 2.4. Смазочные материалы……………………………………………………...117 2.5. Виды разрушения вкладышей……………………………………………..118 2.6. Условный расчет подшипников скольжения……………………………..119 2.7. Подвод смазочного материала. К.п.д……………………………………...120 2.8. Рекомендации по конструированию………………………………………122 ГЛАВА 3. Подшипники качения……………………………………………………..123 3.1. Общие сведения…………………………………………………………….123 3.2. Классификация и маркировка подшипников качения…………………...124 3.3. Основные типы подшипников качения и их материалы………………...126 3.4. Виды разрушения подшипников качения………………………………...130 3.5. Расчет (подбор) подшипников качения на долговечность………………130 ГЛАВА 4. Муфты……………………………………………………………………..132 4.1. Общие сведения…………………………………………………………….132 4.2. Глухие муфты……………………………………………………………….134 4.3. Жесткие компенсирующие муфты………………………………………...135 4.4. Упругие муфты……………………………………………………………..138 4.5. Сцепные муфты…………………………………………………………….141
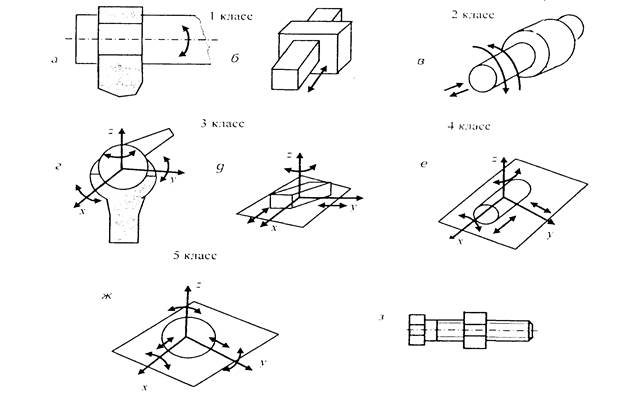
Часть первая Структурный анализ механизмов (техническая механика) Кинематическая пара Известно, что свободное тело в пространстве обладает шестью степенями свободы и может совершать шесть независимых движении: три поступательных движения вдоль трех осей координат и три вращательных движения вокруг этих осей. Но если это тело образует кинематическую пару с другим телом, то минимум на одно движение у него становится меньше – на движение в направлении обшей нормали к поверхностям звеньев в точке их соприкосновения. На это движение накладывается условие связи. Следовательно. Кинематическая пара может иметь максимум пять степеней свободы. Минимально – одну. Если количество степеней свободы будет равно нулю, то это уже будет не кинематическая пара, а неподвижно соединенные звенья. Таким образом, количество степеней свободы кинематической пары может принимать значения от одного до пяти. В соответствии с количеством степеней свободы кинематические пары делятся на классы. Класс кинематической пары определяется количеством ее степеней свободы. На рис. 1.1 представлены примеры кинематических пар.
Кинематическими парами 1-го класса могут быть как вращательные (рис. 1.1 а), так и поступательные (рис. 1.1, б) пары. Кинематическая пара типа «цилиндр в цилиндре» (рис. 1.1 в) является парой 2-го класса. Соединение, допускающее три независимых вращательных движения звеньев (сферический шарнир), образует кинематическую пару 3-го класса (рис. 1.1. г). Примером кинематической пары 4-го класса является цилиндр на плоскости (рис. 1.1 е). А пары 5-го класса – шар на плоскости (рис. 1.1 ж). Кроме указанных кинематических пар имеются пары, относительные движения звеньев которых являются зависимыми. Рассмотрим часто применяемую на практике винтовую кинематические пару винт - гайка (рис. 1.1 З.) Гайка относительно винта совершает два вида движения: вращательное вокруг оси винта и поступательное вдоль оси. Эти движения не являются независимыми, они связаны между собой: величина перемещения гайки вдоль винта зависит от угла поворота гайки. Следовательно, независимое относительное движение здесь одно (вращательное или поступательное), другое – зависимое и поэтому винтовая кинематическая пара является парой первого класса. Кинематические пары делятся на пространственные и плоские. Пространственными называются кинематические пары, точки звеньев которых в относительном движении описывают пространственные кривые. Плоскими называются кинематические пары, точки звеньев которых в относительном движении перемещаются в параллельных плоскостях, т. е. их траектории являются плоскими кривыми. Плоские кинематические пары могут быть только парами 1-го или 2-го классов. Действительно, свободное тело, совершающее плоскопараллельное движение обладает тремя степенями свободы: двумя поступательными движениями вдоль двух взаимно перпендикулярных осей координат х., у и одним вращательным движением вокруг оси г. перпендикулярной плоскости хоу. Но если звено образует с другим звеном кинематическую пару, то минимум на одно из этих трех движений накладывается условие связи (на движение в направлении общей нормали к профилям в точке контакта звеньев), и, следовательно, плоская кинематическая пара может иметь не более двух степеней свободы (рис. 1.2). Плоскими кинематическими парами 1-го класса являются вращательная (см. рис. 1.1. а) и поступательная (см. рис. 1.1. б) пары. Звенья плоской кинематической пары 2-го класса могут совершать поступательное и вращательное движения (рис. 1.2. а). Примером плоской кинематической пары 2-го класса могут быть соприкасающиеся зубья двух зацепляющихся зубчатых колес (рис. 1.2 б), а также кулачок и толкатель кулачкового механизма (рис. 1.2, в).
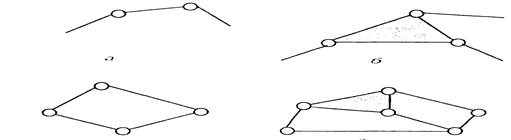
Рис. 1.2 Кинематические пары различают также по характеру соприкосновения звеньев. Поверхности, линии или точки соприкосновения звеньев, называются цементами кинематических пар. Если элементами соприкосновения звеньев являются поверхности, то кинематические пары называются низшими. Если элементами соприкосновения звеньев являются линии или точки, то кинематические пары называются высшими. Так как в низших кинематических парах элементами соприкосновения звеньев являются площадки (поверхности), то удельное давление в них невелико, вследствие чего износ в низших кинематических парах сравнительно невелик. В высших парах элементами соприкосновения звеньев являются линии или точки, поэтому удельное давление в них очень велико, что вызывает повышенный износ звеньев. Это большой недостаток высших кинематических пар по сравнению с низшими. Однако они имеют и значительное преимущество: если количество видов низших пар ограничено, то высших — имеет большое разнообразие и практически не ограничено (профили поверхностей соприкосновения звеньев высших кинематических пар могут быть различными). Поэтому при помощи высших кинематических пар значительно проще создавать механизмы, обеспечивающие заданный закон движения. Кинематическая цепь Связанная система звеньев, образующих между собой кинематические пары, называется кинематической цепью. Кинематические цепи по характеру относительного движения звеньев разделяются на плоские и пространственные. Кинематическая цепь называется тоской, если точки звеньев описывают траектории, лежащие в параллельных плоскостях. Кинематическая цепь называется пространственной, если точки ее звеньев описывают неплоские траектории или траектории, лежащие в пересекающихся плоскостях. Наибольшее распространение на практике имеют плоские кинематические цепи. По виду звеньев, входящих в кинематические цепи, последние разделяются на простые и сложные. Простой кинематической цепью называется такая цепь, в которой каждое звено участвует в образовании не более двух кинематических пар (рис. 1.3, а). Сложной кинематической цепью называется цепь, в которой имеется хотя бы одно звено, входящее более чем в две кинематические пары (рис. 1.3, б). Все кинематические цепи, кроме того, подразделяются на незамкнутые и замкнутые. Незамкнутыми кинематическими цепями называют такие цепи, в которых имеются звенья, образующие только одну кинематическую пару (см. рис. 1.3, а, б).
Рис. 1.3 Замкнутыми называются кинематические цепи, в которых каждое звенообразует не менее чем две кинематические пары (рис. 1.3, в, г). H = 3k – 2p1 – p2 (1.1) В технике обычно интересует движение звеньев кинематической цепи относительно одного из звеньев, которое является неподвижным и называется стойкой. Если одно звено кинематической цепи сделать неподвижным, то число степеней свободы уменьшится еще на три и относительно неподвижного звена (стойки) будет равно W = H – 3 = 3(k–1) – 2p1 – p2 (1.2) где W – число степеней свободы кинематической цени относительно неподвижного звена. Обозначив к- 1 = п (количество подвижных звеньев кинематической цепи), окончательно получим выражение для числа степеней свободы кинематической пени относительно неподвижного звена W = 3n – 2p1 – p2 (1.3) Число степеней свободы кинематической цепи IV относительно неподвижного звена (стойки) называется степенью подвижности кинематической цепи. Формула (1.3) впервые была получена русским ученым П. Л. Чебышевым и носит его имя. Следует отметить, что эта формула пригодна только для определения степени подвижности плоских кинематических цепей.
Механизмы Дадим определение механизма на основании понятия о кинематической цепи. Предварительно отметим, что звенья кинематической цепи, законы движения которых являются заданными, называются ведущими, остальные звенья называются ведомыми. Механизмом называется кинематическая цепь с одним неподвижным звеном (стопкой), в которой при заданном законе движения одного или нескольких ведущих звеньев все остальные (ведомые) звенья движутся вполне определенным образом. Рассмотрим условия, при которых кинематическая цепь будет механизмом. Известно, что точка на плоскости имеет две степени свободы и для определения ее положения необходимо задать две координаты. В случае твердого тела, имеющего при плоском движении три степени свободы, для однозначного определения его положения необходимо знать три координаты: две координаты точки, выбранной за полюс, и угол поворота некоторого отрезка, соединяющего две точки тела. Аналогично и для кинематической цепи. Чтобы положения всех звеньев кинематической цепи относительно стойки были вполне определенными, необходимо задать столько параметров, сколько степеней подвижности (степеней свободы относительно стойки) имеет кинематическая цепь. Параметры, которые задаются кинематической цепи, определяются заданным законом движения ведущего звена (или ведущих звеньев). Поэтому, чтобы движения ведомых звеньев кинематической цепи были вполне определенными, необходимо, чтобы количество ведущих звеньев цепи было равно степени подвижности этой цепи. Только в этом случае кинематическая цепь является механизмом. На рис. 1.4 изображены замкнутые кинематические цепи разной степени подвижности. Кинематическая цепь на рис. 1.4, а представляет собой неподвижное соединение звеньев (W = 0) и не может быть механизмом. Остальные кинематические цепи (рис. 1.4. б - ж) при определенных условиях могут быть механизмами. Так кинематическая цепь на рис. 1.4. д. станет механизмом, если будет задан закон движения двух ведущих звеньев (W = 2 ). Остальные кинематические цепи являются механизмами, если известен закон движения одного из звеньев цепи (W = 1). Для механизма, представленного на рис. 1.4..ж, степень подвижности на единицу больше по сравнению с аналогичным механизмом, представленным на рис. 1.4, е. Увеличение степени подвижности механизма вызвано введением дополнительно подвижного звена – ролика с целью замены трения скольжения на трение качения. В 1916 г. профессором Петербургского политехнического института Л. В. Ассуром был предложен следующий принцип образования механизмов: любой механизм может быть образован путем непосредственного присоединения («наслоения») сначала к ведущему звену и стойке, а затем и к любым другим звеньям кинематических цепей с нулевой степенью подвижности. В самом деле, присоединение к ведущему звену кинематических цепей с путевой степенью подвижности (W = 0) не изменит общей степени подвижности механизма. Кинематические цепи, обладающие нулевой степенью подвижности (степенью свободы относительно стойки), называются группами Аcсура. Все разнообразие групп Аcсура можно получить из формулы Чебышева. Будем полагать, что кинематическая цепь состоит лишь из пар 1-го класса. Тогда для группы Аcсура с нулевой степенью подвижности (W = 0) получим W = 3n – 2p1 = 0 (1.4) или P1 = (3/2)*n (1.5) Так как количество звеньев и кинематических пар может быть только целым числом, то количество звеньев группы Ассура может быть только четным числом. Следовательно, равенству (1.5) могут удовлетворять следующие числа подвижных звеньев п и кинематических пар 1-го класса р1. n = 2,4,6…… p1 = 3,6,9 …..
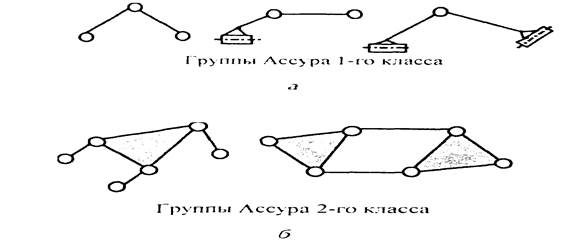
Рис. 1.4 В зависимости от количества звеньев и числа кинематических пар определяется класс группы Ассура. Так, кинематическая цепь с количеством звеньев п = 2 и количеством кинематических пар р1 = 3 является группой Ассура 1-го класса. При п = 2 и р1 = 3 будем иметь группу Ассура 2-го класса и т. д. Примеры групп Ассура 1-го и 2-го классов представлены на рис. 1.5, а, 6. Если присоединить любую группу Ассура к стойке, то получим кинематическую цепь с нулевой степенью подвижности, т. е. ферму (рис. 1.6, а), а если присоединить ее внешними кинематическими парами к ведущему звену и к стойке или к новым звеньям первоначального механизма, то получим новый механизм, степень подвижности которого не изменится (рис. 1.6, б).
Рис 1.5 В соответствии со строением механизмы делятся на классы. Класс механизма зависит от классов групп Ассура, входящих в его состав. Если в состав механизма входят группы Ассура различных классов, то номер класса механизма определяется номером класса наивысшей группы Ассура. На рис. 1.6. б изображен механизм, в состав которого входят группы Ассура 1-го и 2-го классов. Исходя из сказанного выше, данный механизм является механизмом 2-го класса. Механизмы, не содержащие групп Ассура, а состоящие только из ведущего звена, относятся к механизмам нулевого класса. Такие механизмы встречаются на практике довольно часто. К ним, например, относятся механизмы электродвигателей, генераторов и так далее. Рассмотренная классификация механизмов не является единственной. Существуют также другие виды классификаций. Широко используется практическая классификация механизмов, которая в общих чертах учитывает основные кинематические свойства и конструктивные особенности механизмов, а в отдельных случаях и функциональное назначение. В соответствии с практической классификацией механизмы делятся на следующие виды: а) зубчатые передачи; б) фрикционные передачи; в) передачи с гибкой связью; г) винтовые механизмы; д) кулачковые механизмы; е) рычажные механизмы; ж)механизмы прерывистого действия; з)электромагнитный механизмы и др. На рис. 1.7 представлены кинематические схемы механизмов в соответствии с практической классификацией: фрикционные механизмы: цилиндрический (а) и конический с постоянным передаточным отношением (б), с переменным передаточным отношением (в): кулачковые механизмы: с поступательно движущимся (г) и качающимся (д) толка гелем; механизм с гибкой связью (е)
Рис 1.6
Рис 2.1 Непрерывная кривая АМВ. описываемая с течением времени движущейся точкой /V/. называется траекторией. В зависимости от траектории движение может быть прямолинейным или криволинейным. Геометрическое место концов любого переменного вектора при неизменном положении его начала называется годографом. Следовательно, траектория точки совпадает с годографом ее радиус-вектора. При движении точки М вектор rизменяется как по модулю, так и по направлению, другими словами, он является переменным вектором, зависящим от аргумента t г = r (t). (2.1) Это и есть уравнение движения точки в векторной форме. Если в момент времени t точка находится в положении М, то в момент времени t1 = t +D t она будет находиться в положении М1Соответственно, положение точки определяется радиус-векторами rи r 1,. Вектор MM1, является вектором перемещения точки М за данный промежуток времени D t
MM1 = D r = r1 – r (2.2) Отношение вектора перемещения точки к соответствующему промежутку времени определяет среднюю скорость точки уср:
Чтобы получить характеристику движения, не зависящую от выбора промежутка времени, вводится понятие скорости точки в данный момент времени:
Следовательно,
Вектор скорости точки (см. рис. 2.1) будет направлен по касательной к траектории движения точки. Если выбрать в пространстве точку и туда перенести все векторы скоростей в моменты времени, близко отстоящие один от другого, то получим кривую, являющуюся годографом вектора скорости (рис. 2.2). Годограф скорости представляет собой геометрическое место концов вектора скорости движущейся точки. Если за время D t скорость изменилась на величину D v, то отношение изменения скорости к промежутку времени, за который произошло это изменение, будет средним ускорением. Для нахождения значения ускорения в данный момент времени необходимо найти предел отношения приращения скорости к промежутку времени, в течение которого оно произошло, при стремлении последнего к нулю:
Таким образом,
Рис. 2.2 Координатный способ задания движения точки. Координатный метод изучения движения точки используется в основном при решении технических задач. При движении точки ее координаты изменяются с течением времени. Следовательно:
Это и есть уравнения движения точки в прямоугольных координатах. Одновременно эти уравнения являются уравнениями траектории точки в параметрической форме. Исключив из них параметр /, получим уравнение траектории, характеризующее пространственную кривую в координатной форме.
Рис. 2.3 Радиус-вектор г (рис. 2.3), определяющий положение точки М, можно представить в форме
где i, j, k — единичные векторы (орты). Система осей Охуz предполагается неподвижной, вследствие чего векторы (орты) i, j, k являются постоянными. Дифференцируя выражение (2.10) для радиус-вектора г, получим
Выражение (2.10) представим в виде
где vx, vy, vz- — проекции вектора скорости на соответствующие оси координат, определяемые из выражений
Модуль вектора скорости определяется выражением
а направляющие косинусы для вектора скорости записываются виде
Аналогично записываются выражения для вектора ускорения при координатном способе задания движения точки, модуля вектора и направляющих косинусов
Рис. 2.4 Будем считать j > 0. если вращение наблюдается с положительного направления оси z происходящим против часовой стрелки, и j < 0. если — по часовой. Измеряется угол j в радианах. При вращении тела угол поворота j изменяется в зависимости от времени, т. е. является функцией времени t:
Это уравнение называется уравнением вращательного движения твердого тела. Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость w угловое ускорение e. Если за время D t = t1 + t тело совершает поворот на Dj = j1 –j,то средняя угловая скорость тела за этот промежуток времени будет равна
Для определения значения угловой скорости тела в данный момент времени t найдем предел отношения приращения угла поворота Dj к промежутку времени D t при стремлении последнего к нулю:
Таким образом, угловая скорость тела в данный момент времени численно равна первой производной от угла поворота по времени. Знак угловой скорости w совпадает со знаком угла поворота тела j: w > 0 при j > 0, и наоборот, если j < 0. то и w < 0. Размерность угловой скорости обычно 1/с, так радиан величина безразмерная. Угловую скорость можно изобразить в виде вектора w, численная величина которого равна dj/dt который направлен вдоль оси вращения тела в ту строну, откуда вращение видно происходящим против часовой стрелки. Изменение угловой скорости тела с течением времени характеризует угловое ускорение e. По аналогии с нахождением среднего значения угловой скорости найдем выражение для определения значения среднего ускорения:
Тогда ускорение твердого тела в данный момент времени определится из выражения
т. е. угловое ускорение тела в данный момент времени равно первой производной от угловой скорости или второй производной от угла поворота тела по времени. Размерность углового ускорения 1/с2. Угловое ускорение твердого тела так же, как и угловая скорость, может быть представлено как вектор. Вектор углового ускорения совпадает по направлению с вектором угловой скорости при ускоренном движении твердого юла и направлен в противоположную сторону при замедленном движении. Установив характеристики движения твердого тела в целом, перейдем к изучению движения отдельных его точек. Рассмотрим некоторую точку М твердого тела, находящуюся на расстоянии h от оси вращения г (рис. 2.3). При вращении тела точка М будет описывать окружное п. радиусом h с центром на оси вращения и лежащую в плоскости, перпендикулярной этой оси. Если за время dtпроисходит элементарный попорот тела па угол dj, то точка М при этом совершает вдоль своей траектории элементарное перемещение dS = h*dj ,. Тогда скорость точки М определился из выражения
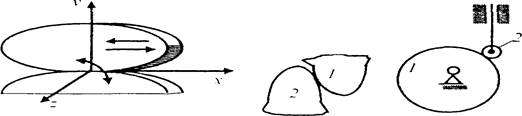
Скорость называют линейной или окружной скоростью точки М. Таким образом, линейная скорость точки вращающегося твердого тела численно равна произведению угловой скорости тела на расстояние от этой точки до оси вращения. Так как для всех точек тела угловая скорость w; имеет одинаковое значение, то из формулы для линейной скорости следует, что линейные скорости точек вращающегося тела пропорциональны их расстояниям от оси вращения. Линейная скорость точки твердого тела является вектором п направлена по касательной к окружности, описываемой точкой М. Бели расстояние от оси вращения твердого пела до некоторой точки М рассматривать как радиус-вектор h точки М, то вектор линейной скорости точки v можно представить как векторное произведение вектора угловой скорости w радиус-вектор h: V = w * h (2/21) Действительно, результатом векторного произведения (2.21) является вектор, равный по модулю произведению w*h и направленный (рис. 2.5) перпендикулярно плоскости, в которой лежат два сомножителя, в ту сторону, откуда ближайшее совмещение первого сомножителя со вторым наблюдается происходящим против часовой стрелки, т. е. по касательной к траектории движения точки M. Таким образом вектор, являющийся результатом векторного произведения (2.21), по модулю и по направлению соответствует вектору линейной скорости точки M.
Рис. 2.5 Для нахождения выражения для ускорения а точки М выполним дифференцирование по времени выражения (2.21) для скорости точки
Учитывая, что dj/dt=e, a dh/dt = v, выражение (2.22) запишем в виде
где аг и аnсоответственно касательная и нормальная составляющие полного ускорения точки тела при вращательном движении, определяемые из выражений
Касательная составляющая полного ускорения точки тела (касательное ускорение) atхарактеризует изменение вектора скорости по модулю и направлена по касательной к траектории движения точки тела в направлении вектора скорости при ускоренном движении либо в противоположном направлении при замедленном движении. Модуль вектора касательного ускорения точки тела при вращательном движении твердого тела определяется выражением
Нормальная составляющая полного ускорения (нормальное ускорение) а„ возникает вследствие изменения направления вектора скорости точки при крашении твердого тела. Как следует из выражения (2.24) для нормального ускорения, это ускорение направлено по радиусу hк центру окружности, по которой перемещается точка. Модуль вектора нормального ускорения точки при вращательном движении твердого тела определяется с учетом (2.20) выражением
Основные понятия сопротивления материалов Усилия, действующие на детали механизмов, делят на внешние нагрузки и внутренние силы упругости. Внешние нагрузки, в свою очередь, разделяют на объемные и поверхностные. К объемным относятся силы веса, силы инерции, электромагнитные силы. Поверхностные нагрузки могут быть распределенные и сосредоточенные. Сосредоточенно!! называется нагрузка, приложенная на весьма малой по сравнению с общими размерами детали площадке. Распределенная нагрузка может быть приложена по поверхности или по линии. Распределенные нагрузки измеряются в единицах интенсивности нагрузки (Н/м2, Н/м). Кроме этого, внешние нагрузки делят на заданные и реакции опор. Внутренние силы упругости представляют собой силы межмолекулярного взаимодействия. В результате действия внешних сил возникают упругие и пластические (остаточные) деформации. Детали машин и приборов работают, главным образом, в области упругих деформаций. Упругостью называется свойство тела восстанавливать свои первоначальные размеры и форму после снятия нагрузки. Исследование деформированного состояния упругих тел производится с использованием нескольких основных гипотез: - однородности (свойства тела в любой точке одинаковы); - изотропности (свойства тела одинаковы во всех направлениях); - сплошности (тело сплошным образом заполняет пространство, ограниченное его поверхностью). Очень важным является принцип независимости действия сил и деформаций (принцип суперпозиции), который сводится к следующему: деформации, возникающие в теле при действии на него данной системы уравновешенных сил, не зависят от деформаций, вызванных в этом же теле действием другой системы уравновешенных сил. Этот принцип справедлив при линейной зависимости между перемещениями точек деформированного тела и внешними силами, их вызывающими. Метод сечений. Нормальные и касательные напряжения. Одной из основных задач расчетов на прочность является выяснение характера и величины внутренних сил упругости, действующих в нагруженной детали. Для этого используется метол сечений, заключающийся в следующем. Мысленно выполним сечение тела, находящегося в равновесии под действием сил F1, F2 ….Fn. плоскостью АВ (рис. 3.1).
Рис. 3.1
Поскольку тело под действием указанных сил находится в равновесии, то в равновесии будет находиться и любая его часть. Отбросим мысленно правую часть и рассмотрим условие равновесия оставшейся левой части (рис. 3. 2). Для того чтобы оставшаяся часть тела находилась в равновесии, по поверхности сечения должны действовать силы, эквивалентные действию правой части на левую. Такими силами являются внутренние силы упругости, распределенные по сечению аб. Таким образом, с помощью метода сечений внутренние силы упругости переводятся в разряд внешних сил и для их определения оказывается возможным применять соответствующие теоремы статики. Распределенная система внутренних сил упругости может быть сведена к одной силе R — главному вектору внутренних сил упругости и к одному моменту M — главному моменту этих сил. Главный вектор R и главный момент М можно разложить на составляющие — проекции векторов на оси координат
Составляющая Nx. называемая нормальной силой, вызывает деформацию растяжения (стремится оторвать одну часть тела от другой). Составляющие Qx, Qz стремящ   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


 (2.3)
(2.3) (2.4)
(2.4) (2.5)
(2.5) (2.6)
(2.6) (2.7)
(2.7)
 (2.8)
(2.8)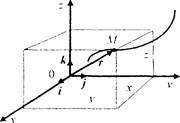
 (2.9)
(2.9) (2.10)
(2.10) (2.11)
(2.11) (2.12)
(2.12) (2.13)
(2.13) (2.14)
(2.14) (2.15)
(2.15) (1.16)
(1.16) (2.17)
(2.17) (2.18)
(2.18) (2.19)
(2.19) (2.20)
(2.20)
 (2.22)
(2.22) (2.23)
(2.23) (2,24)
(2,24) (2,25)
(2,25) (2.26)
(2.26)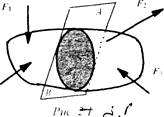

 (3.1)
(3.1)