
|
|
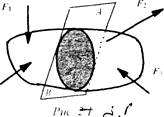
ОСНОВЫ РАСЧЕТОВ НА ПРОЧНОСТЬОсновные понятия сопротивления материалов Усилия, действующие на детали механизмов, делят на внешние нагрузки и внутренние силы упругости. Внешние нагрузки, в свою очередь, разделяют на объемные и поверхностные. К объемным относятся силы веса, силы инерции, электромагнитные силы. Поверхностные нагрузки могут быть распределенные и сосредоточенные. Сосредоточенно!! называется нагрузка, приложенная на весьма малой по сравнению с общими размерами детали площадке. Распределенная нагрузка может быть приложена по поверхности или по линии. Распределенные нагрузки измеряются в единицах интенсивности нагрузки (Н/м2, Н/м). Кроме этого, внешние нагрузки делят на заданные и реакции опор. Внутренние силы упругости представляют собой силы межмолекулярного взаимодействия. В результате действия внешних сил возникают упругие и пластические (остаточные) деформации. Детали машин и приборов работают, главным образом, в области упругих деформаций. Упругостью называется свойство тела восстанавливать свои первоначальные размеры и форму после снятия нагрузки. Исследование деформированного состояния упругих тел производится с использованием нескольких основных гипотез: - однородности (свойства тела в любой точке одинаковы); - изотропности (свойства тела одинаковы во всех направлениях); - сплошности (тело сплошным образом заполняет пространство, ограниченное его поверхностью). Очень важным является принцип независимости действия сил и деформаций (принцип суперпозиции), который сводится к следующему: деформации, возникающие в теле при действии на него данной системы уравновешенных сил, не зависят от деформаций, вызванных в этом же теле действием другой системы уравновешенных сил. Этот принцип справедлив при линейной зависимости между перемещениями точек деформированного тела и внешними силами, их вызывающими. Метод сечений. Нормальные и касательные напряжения. Одной из основных задач расчетов на прочность является выяснение характера и величины внутренних сил упругости, действующих в нагруженной детали. Для этого используется метол сечений, заключающийся в следующем. Мысленно выполним сечение тела, находящегося в равновесии под действием сил F1, F2 ….Fn. плоскостью АВ (рис. 3.1).
Рис. 3.1
Поскольку тело под действием указанных сил находится в равновесии, то в равновесии будет находиться и любая его часть. Отбросим мысленно правую часть и рассмотрим условие равновесия оставшейся левой части (рис. 3. 2). Для того чтобы оставшаяся часть тела находилась в равновесии, по поверхности сечения должны действовать силы, эквивалентные действию правой части на левую. Такими силами являются внутренние силы упругости, распределенные по сечению аб. Таким образом, с помощью метода сечений внутренние силы упругости переводятся в разряд внешних сил и для их определения оказывается возможным применять соответствующие теоремы статики. Распределенная система внутренних сил упругости может быть сведена к одной силе R — главному вектору внутренних сил упругости и к одному моменту M — главному моменту этих сил. Главный вектор R и главный момент М можно разложить на составляющие — проекции векторов на оси координат
Составляющая Nx. называемая нормальной силой, вызывает деформацию растяжения (стремится оторвать одну часть тела от другой). Составляющие Qx, Qz стремящиеся сдвинуть одну часть тела относительно другой, называют поперечными силами. Поперечные силы вызывают деформации сдвига. Составляющая Mх главного момента вызывает деформации кручения и называется крутящим моментом. Моменты Му, и Мzизгибают тело соответственно в плоскостях xoz и xoy и называются изгибающими моментами. Определение главного вектора R и главного момента M внутренних сил упругости (либо их составляющих) является одной из основных задач расчетов на прочность. Интенсивность внутренних сил упругости характеризуется напряжением, которое измеряется в единицах интенсивности нагрузки, Н/м2.
Напряжение в точке зависит от ориентации сечения, содержащего данную точку. Ориентация сечения может быть определена направлением внешней нормали к данному сечению. Рассмотрим в деформированном теле произвольное сечение с нормалью h; (рис. 3.3). Выделим около точки M данного сечения малую площадку площадью DS. Если равнодействующая сил упругости, действующих по этой площадке, будет DF, то полное напряжение pn в точке М определится как предел отношения:
Индекс п в обозначении напряжения свидетельствует о том, что нормалью к рассматриваемому сечению является нормаль п. Это напряжение принято раскладывать на две составляющие - нормальную sп и тангенциальную (касательную) tn,т. е.
Тогда модуль полного напряжения в точке M будет равен
В свою очередь вектор нормального напряжения sn можно разложить по осям координат на составляющие sxx sxy sxz. Аналогично можно получить составляющие вектора касательного напряжения tn: tnx tny tnz. Таким образом, полное напряжение, действующее по сечению, нормаль к которому n ориентирована произвольно по отношению к координатным осям, раскладывается на шесть составляющих. Если нормалью к сечению является некоторая координатная ось, то полное напряжение раскладывается не на шесть, а только на три составляющие. Так, например, для сечения, нормалью к которому является ось х полное напряжение рх раскладывается на три составляющие: sxx tny tnz при этом нормальную составляющую обычно* записывают с одним индексом: sx. В соответствии с этим составляющие напряжений, действующих по сечениям, нормалями к которым являются координатные оси y и z, будут обозначаться соответственно: sy tyx tyz и sz tzx tzy.
  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 (3.1)
(3.1)
 (3.2)
(3.2) (3.3)
(3.3) (3.4)
(3.4)