|
|
Исследование боковых столкновений
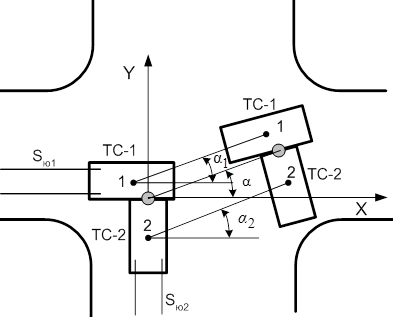
Боковые столкновения происходят главным образом на перекрестках, в зонах выездов из дворов и прилегающих территорий. Проще всего и с достаточной точностью рассчитываются боковые столкновения, когда ТС примерно одной массы подходят под углом 90° и затем перемещаются практически без расхождения друг с другом (рис. 16). В самом простом случае после определения положений ТС в момент столкновения через зону контакта проводятся линии координатных осей, на которые можно проектировать векторы скоростей и количества движения [7]: ¾ в проекции на ось Х ¾ в проекции на ось Y
где V 1С и V 2С – скорости ТС в момент столкновения (первого контакта); V х и V у – проекции скорости совместного перемещения ТС от места столкновения на оси X и Y.
Рис. 16. Схема расположения ТС при боковом столкновении
Скорость совместного движения ТС после столкновения определяется по пути перемещения S зоны контактирования:
а проекции на оси:
Тогда скорости в момент столкновения соответственно получают в следующем виде:
Если ТС после столкновения расходятся центрами масс по направлениям с углами a1 и a2, то вначале находятся значения скоростей V 1 и V 2 каждого ТС после столкновения по перемещению центра масс (соответственно по S 1 и S 2), а затем скорости ТС в момент столкновения:
По размерам следов юза до столкновения находятся начальные скорости ТС и затем их взаимное расположение в единые моменты времени на подходе к перекрестку. Следует отметить, что по материалам исследований при боковых столкновениях до 20% энергии может затрачиваться на деформацию кузова легковых автомобилей. Но при ударном воздействии шины автомобилей не сразу от места столкновения реализуют полное сцепление с дорогой. Поскольку в расчете перемещения берут от места столкновения с полной реализацией сцепления, то таким образом существенно компенсируются потери скорости на деформации. Но чаще все же имеют место косые боковые столкновения ТС, когда водители успевают немного изменить траекторию для ухода от столкновения, либо одно из ТС совершает на перекрестке поворот. В этих случаях, когда ТС взаимодействуют всей своей массой, уже нельзя пренебрегать затратами энергии на разворот ТС после столкновения, поэтому рационально использовать графоаналитический метод с построением диаграммы векторов количества движения в момент расхождения, а затем в момент столкновения на базе одной равнодействующей (на основе закона сохранения количества движения) [6]. Последовательность определения скоростей ТС в момент столкновения следующая. Вначале определяется положение ТС в момент первого контакта с учетом информации с места ДТП (следы, осыпь, повреждения ТС, траектории подхода, перемещения и др.) и строится масштабная схема. По ней находят пути перемещения центров масс ТС и углы их разворота после столкновения при переходе от места столкновения в конечное положение. По данным перемещений S и разворотов g определяются значения остаточных скоростей ТС после столкновения:
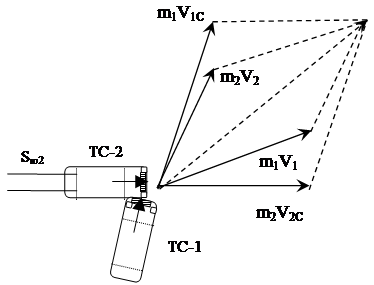
Затем находится значение вектора количества движения mV каждого ТС, и из начала координат эти векторы в определенном масштабе откладываются по направлениям перемещения соответствующих центров масс от места столкновения. Строится параллелограмм и находится вектор равнодействующей количества движения (рис. 17). На векторе равнодействующей вектора количества движения строится новый параллелограмм по направлениям уже подхода ТС к месту столкновения. Если одно из ТС двигалось на повороте, то берется направление касательной к траектории центра масс в момент столкновения. По такому построению находятся векторы количества движения ТС в момент столкновения, а по ним с учетом масштаба построения диаграммы определяются уже значения скоростей ТС в момент столкновения.
Рис. 17. Построение диаграмм векторов количества движения
Значение скорости поворачивающего ТС проверяется по боковой перегрузке на повороте данной кривизны. Если значение скорости получается близкой к предельной по условиям сцепления, а явный занос этого ТС при ударе не возник, то уточняются условия сцепления и место первого контакта, при котором ТС должно было располагаться на траектории меньшей кривизны. Затем по имеющимся следам торможения до столкновения находятся начальные скорости ТС и время их движения до места столкновения от границы проезжей части, от стоп-линии и от положения взаимного обнаружения на подходе к перекрестку. На регулируемых перекрестках необходима надежная информация о режиме работы светофорного объекта и о сигнале светофора в момент столкновения. О последнем наиболее надежными могут быть показания водителей нестолкнувшихся ТС, которые стояли в ожидании разрешающего сигнала или только начинали движение на него. Именно таких свидетелей необходимо фиксировать сразу после столкновения. Распространенным является конфликт между продолжающим движение ТС-1 на желтый сигнал светофора в соответствии с п. 6.14 ПДД, разрешающим продолжить движение, если водитель при включении желтого сигнала не может остановиться перед стоп-линией, перед пересекаемой проезжей частью (с учетом п. 13.7 ПДД, обязывающего выехать с перекрестка), не прибегая к экстренному торможению –конфликт с начинающим движение ТС-2 на зеленый сигнал или въезжающим ТС-3 на перекресток с ходу на этот сигнал. Столкновение может произойти при загорании для заканчивающего проезд уже красного сигнала светофора. По сумме времени горения красного (зеленого для пересекаемого направления) и желтого сигналов светофора находится удаление ТС-1 в момент загорания для него желтого сигнала
SУ = V 0(tк + tж) – (V 0 – V 1с)2 / 2 jT – при торможении или SУ = V 1с (tк + tж) – без торможения.
Из этого удаления вычитают расстояние от стоп-линии (линии пересечения проезжей части) до места столкновения. Это удаление сравнивается со значением остановочного пути ТС-1 при экстренном торможении и не прибегая к экстренному, т.е. при служебном торможении, интенсивность которого принимается обычно 0,4-0,45 (не более 0,5) от предельного по возможностям ТС или по условиям сцепления. Если удаление получается меньше пути служебного торможения, то следует указать на возможность этому водителю продолжить движение через перекресток. А водителю ТС-2 или ТС-3 указывается на несоответствие их действий требованию п. 13.8 ПДД, обязывающему водителей при включении для них разрешающего сигнала светофора уступить дорогу ТС, завершающим движение через перекресток. В условиях низкого сцепления путь служебного торможения из-за высокой скорости подхода ТС-1 может быть большим и по формулировке п.13.8 ПДД ТС-1 формально не относится к «завершающему движение через перекресток». В этой связи объективно с технической стороны имеются основания для указаний несоответствия действий водителя ТС-1 требованию п.10.1 ПДД по уровню скорости, а водителю ТС-2 – несоответствия п.10.1 по скорости и п.13.8 ПДД. Эксперту также приходится определять техническую возможность предотвращения ДТП обоими водителями с момента обнаружения опасности. Экспертам часто предлагают проверить расчетом противоречивые показания участников о скорости движения и о положении ТС относительно перекрестка в момент смены сигналов светофора. Рационально по результатам расчетов на масштабной схеме показать взаимные положения участников в характерные единые для обоих участников моменты времени. Если скорость в момент столкновения ТС, водитель которого утверждает о начале своего движения с места, окажется выше скорости по возможностям интенсивного разгона этого ТС с места, то эксперт делает вывод о том, что водитель данного ТС не начинал движение с места, а выезжал на перекресток с ходу, что и могло быть главной причиной столкновения:
tp = 2 Sp / Vc ; Vc > tp jp.
Значение ускорения jp при разгоне с места определяется расчетом с учетом степени использования мощности двигателя при высоком сцеплении или по условиям реализации низкого сцепления без буксования на данном участке ДТП. Такое обычно бывает при движении ТС-3 с ходу мимо начинающих движение ТС-2, водители которых пропускают подходящий к перекрестку на высокой скорости автомобиль под конец разрешающего для него сигнала, а также на начало даже красного для него сигнала светофора. В условиях низкого сцепления и при большой плотности транспортных потоков на перекрестках с большой шириной проезжей части время горения желтого сигнала светофора в течение 3 секунд оказывается недостаточным, и водители часто начинают движение уже на желтый сигнал, особенно когда по их направлению разрешающий сигнал светофора горит короткое время. Водители ТС, которым при скорости подхода к перекрестку 50 км/ч желтый сигнал светофора загорится на расстоянии более 40 м, должны представлять, что на перекресток они въедут уже на красный для них сигнал светофора, когда с примыкаемого направления при многорядном движении не видящие его подход водители ТС могут начать движение. Ситуации часто осложняются плохой видимостью светофоров и сложной конфигурацией перекрестков. На нерегулируемых перекрестках водители ТС со второстепенной дороги часто ошибаются в расстоянии до ТС на главной дороге из-за явного превышения последним разрешенного уровня скорости. И только анализом ситуации с определением скоростных параметров ТС по расчету столкновения эксперт может выявить несоответствия действий водителя на главной дороге требованию пп. 10.1 и 10.2 ПДД. Конфликты на нерегулируемых перекрестках со столкновением часто бывают из-за недостаточной видимости подходов и отсутствия знаков приоритета, которые обязательно должны устанавливаться при видимости подходов менее 50 м. На это следует указать эксперту в заключении. В зимнее время возможны конфликты с местными водителями, которые знают, что они движутся по дороге, на которой под снегом имеется асфальтобетонное покрытие, отсутствующее на пересекаемой дороге. Но при отсутствии знаков приоритета это не дает им преимущества. Поэтому при таких ДТП необходимо у водителей брать подробные объяснения их действий с обоснованием своего приоритета в последовательности выполнения требований пп. 13.13, 13.9, 13.11 и 13.12 ПДД. По расчету столкновений с определением скоростей и взаимного положения ТС эксперт может определить техническую возможность предотвращения ДТП и выявить несоответствие уровня скорости подхода к пересечению выполнению требования уступить дорогу.
  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ;
; ,
,
 ,
, ,
,  .
. ;
; .
. ;
; .
. .
.