
|
|
Модуль 1. Общие сведения о ГПМСтр 1 из 16Следующая ⇒ Грузопоъемные машины Модуль 1. Общие сведения о ГПМ Раздел 1.1. Назначение, классификация, основные характеристики ГПМ Классификация, принципы проектирования ГПМ Грузоподъёмные машины (сокр. ГПМ) — класс подъёмно-транспортных машин (ПТМ) циклического действия, предназначенных для подъёма грузов и/или людей в вертикальной или близким к ней наклонных плоскостях. ГПМ - являются средствами комплексной механизации нефтегазового производства, и предназначены для сокращения или исключения тяжелого ручного и малоквалифицированного труда при грузоподъёмных, грузоподъёмно - транспортных и транспортных операциях.
По виду ПТМ делятся:
Транспортирующие машины 1.1 Транспортирующие машины непрерывного действия 1.1.1 Конвейеры а) с гибким тяговым органом -ленточные -пластинчатые -скребковые -подвесные -тележечные -ковшевые б) без гибкого тягового органа -гравитационные - винтовые -инерционные -роликовые -шагающие 1.1.2 Установки гидравлического транспортирования 1.1.3 Установки пневматического транспортирования 1.2 Транспортирующие машины циклического действия 1.2.1 Железнодорожный транспорт 1.2.2 Автомобильный транспорт 1.2.3 Водный транспорт
Грузоподъемные машины 2.1 Грузоподъемные устройства (домкраты, лебедки, тали и др.) 2.2.Грузоподъемные краны (несколько механ 2.2.1 Краны мостового типа -мостовые -козловые -кабельные Виды мостовых кранов Мостовые краны по типу конструкции разделяются на три вида: Опорный мостовой кран - его мост опирается на надземные верхние рельсы; Подвесной мостовой кран, мост которого подвешивается к нижним полкам рельсов; Кран мостовой козловой, мост которого установлен на наземные рельсы на опорах.
2.2.2 Краны стрелового типа -автомобильные -пневмоколесные -гусеничные -башенные -тракторные 2.3 Подъемники а) скиповые (наклонные, вертикальные) Скип — подъёмный, саморазгружающийся короб (клеть), служащий для подъёма сыпучих и мелкокусковых грузов, движущийся с помощью канатов по направляющим приспособлениям скипового подъёмника. Скипы служат для подъёма на поверхность угля, руды и других полезных ископаемых в горно-рудной промышленности. Их также применяют для загрузки шихты в доменные печи. б) лифты (грузовые, пассажирские)
Дополнительной характеристикой крупности является гранулометрический состав, описывающий распределение по крупности. Гранулометрический состав определяется просеиванием материала на ситах с установленной шириной ячейки. Пример графика гранулометрического состава приведен на рисунке 1.
Рис. 1.1.1 диаграмма гранулометрического состава
б) Насыпная плотность – масса частиц в 1м3 объема Коэффициент уплотнения груза:
плотность свободно насыпанного груза – плотность динамически уплотненного – в ) Сыпучесть – определяется сцеплением частиц груза между собой. Сыпучесть может характеризоваться по нескольким показателям: -коэффициент внутреннего трения – при трении частиц материала друг о друга -угол внутреннего трения (угол естественного откоса) –угол у основания призмы образованной при отсыпании материала. г) Липкость – способность насыпных грузов прилипать к поверхностям твердых тел д) Абразивность – способность грузов изнашивать элементы транспортирующих машин е) Хрупкость – свойство частиц грузов разрушаться при перемещении, погрузки, выгрузке) ж) Самовозгораемость – свойство материала возгораться под действием теплоты от внутренних хим. процессов. з) Г игроскопичность – свойство грузов впитывать влагу и) С леживаемость - свойство грузов терять подвижность при длительном хранением к) С мерзаемость – потеря подвижности при низких температурах л) Коэффициент внешнего трения – коэффициент пропорциональности между силой трения и нормальной силой при движении груза по другому материалу 3) Жидкие грузы [расплавленные металлы, шлаки] Основные свойства: плотность, температура, хим. состав и др. Длительность рабочего цикла Рабочий цикл начинается когда груз готов к подъему, и заканчивается, когда кран готов к подъему следующего груза Группа классификации крана Предназначена для определения рациональных параметров кранов крановых механизмов, с целью обеспечения режимов необходимого уровня безопасности и долговечности. Группа классификации позволяет судить о режимах работы крана в период эксплуатации и предусматривать при проектировании принятия дополнительных мер для соответствующего изменения конструкции. Группа классификации устанавливается как для крана в целом, так и для отдельных механизмов. А) Группа классификации крана (A1-A8) принимается по двум показателям: - класс использования крана (U0-U9) (определяет интенсивность работы крана) Для определения класса использования необходимо установить общее количество рабочих циклов за срок службы крана Таблица 3.1.1
- режим нагружения крана (Q1-Q4) (определяет уровень нагрузок) определяется числом подъемов груза определенной массы по значению коэффициента распределения нагрузок:
где P i- массы отдельных грузов; Pmax - номинальная масса груза; Сi – кол-во циклов с грузом Pi; С T-общее количество циклов нагружения
Таблица 3.1.2
Группа классификации крана Таблица 3.1.3
Б) Группа классификации механизмов (М1-М8) принимается по двум показателям: - класс использования механизмов (T0-T9) Таблица 3.1.4
4) режим нагружения механизмов определяется длительностью с которой механизм подвергается действию максимальной нагрузки. Принимается по значению коэффициента распределения нагрузок:
где Pi – отдельные уровни нагрузки механизма; Pmax – наибольший уровень нагрузки; ti – продолжительность работы с нагрузкой Рi; tT – общая продолжительность работы. Графическое изображение уровня загрузки механизмов кранов представлено на рис. 3.1.1. Таблица 3.1.5
Грузозахватные органы Устройства для закрепления груза к тяговому элементу грузоподъемного механизма. По назначению различают: а) универсальные (крюки, петли, магниты и др.) б) специальные По виду груза: для штучных, для насыпных По способу захвата груза: - стропами - зажимные (клещевые) - подхватывающие - притягивающие (магниты, вакуумные захваты) - зачерпывающие (грейферы) По способу привода: - механичесие - ручные По способу управления: - ручные - дистанционные - полуавтоматические - автоматические
а. Крюковые подвески
Применяют для: - непосредственного закрепления грузов (при наличие у груза специальных приспособлений (петель, проушин, рым-болтов и т.д.)) - крепления при помощи канатных и цепных стропов - для крепления навесного грузозахватного оборудования (грейферы, магниты, и т.д.) По конструкции различают: а) однорогие крюки (ГОСТ 6627-74) 0,4-100т (26 типоразмеров) б) двурогие крюки (ГОСТ 6628-79) 5-100т (14 типоразмеров)
Рис. 3.1.3. Крюки а – однорогие; б – двурогие; в – пластинчатые однорогие; г – пластнчатые двурогие
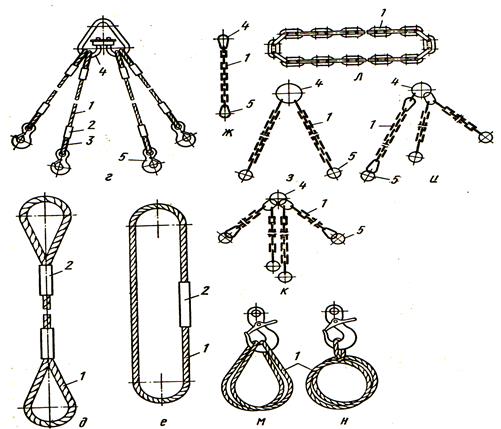
в) грузовые петли - разъемные - неразъемные По способу изготовления крюки различают: - литые - кованые - штампованные - пластинчатые (для большой грузоподъемности 40-320т) По конструкции крюковой подвески: - короткие крюковые подвески (блоки и крюк на одной траверсе) - длинные крюковые подвески Чалочные устройства (стропы) различают: а) по количеству ветвей - одноветвевые (1СК (канатные), 1СЦ (цепные)) [0.32-20т] 1-СК-32 (одноветвевой канатный строп грузоподъемностью 32т) - двухветвевые (2СК, 2СЦ) [0.4-25т] - трехветвевые (3СК, 3СЦ) [0.63- 20т] - четырехветвевые “пауки” (4СК, 4СЦ) [0.63-32т] - универсальные (УСК1, УСК2, УСЦ1, УСЦ2) [0.63-32т] - многоветвевые (полотенчатые) обозначение стропового захвата 4 СК-25 -1200 (четырехветвевой строп канатный грузоподъемность 25т, длина 1,2м)
Рис.3.1.4. Устройства с дистанционной и механизированной расстроповкой
б) по способу строповки - за захватные устройства - за края - в обхват в) по способу строповки
- с непосредственной ручной строповкой (стропальщик) - с дистанционной строповкой (Рис.3.3.) - с автоматической строповкой -
Вакуумные захваты
Принцип действия захватов заключается в том, что в установленной на поверхности груза в вакуумной камере создается разрежение воздуха (вакуум). С помощью вакуумных захватов перемещают изделия из различных материалов (металла, камня, бетона, дерева, пластмассы, стекла), а также листы с рифленой, волнистой, сильно корродированной поверхностью. Наиболее распространены насосные захваты, которые включают (рис. 16, а) насос с двигателем 1, ресивер 3, коллекторы 4; трехходовые электромагнитные клапаны 2и вакуумные камеры 5. Корпус ресивера часто используют в качестве элемента рамы захвата. Камеры выполнены в виде выпуклой тарелки или по форме перемещаемого изделия. По краям камер закреплены уплотнения из губчатой или мягкой резины (рис. 16, б). Насос создает необходимый вакуум в ресивере (при этом клапан закрыт), камеры опускаются на изделие, включают электромагнитный клапан, который соединяет магистраль ресивера с камерами, в результате изделие за 3... 5 с притягивается к захвату. При неработающем насосе можно удержать изделие в течение 20 — 30 мин благодаря наличию в ресивере вакуума с определенным запасом. Для освобождения изделия камеры соединяют с атмосферой. Управление захватами может быть ручным или дистанционным.
Рис.3.1.13 Вакуумные захваты
Сила притяжения вакуумной камеры
F=A*kp(P a -P в ),
А –площадь камеры (А=0,2-0,4 м2), Кр=0,8-0,9-коэффициент возможного изменения давления, Ра -атмосферное давление Р=105Па, Рв –минимальное давление в камере Рв=(0,15-0,2)*105Па. Условие удержания груза F ³ k*G/n
где k-коэффициент запаса k=2; G –вес груза; n –число захватов
Э лектромагниты Электромагниты предназначены для захвата и транспортирования грузов из ферромагнитных материалов (проката черных металлов, чугунных чушек, стального металлолома и стружки). Номинальная грузоподъемность электромагнита соответствует поднимаемой наибольшей массе груза в виде сплошной плиты. При других видах груза грузоподъемность составляет: 40 % номинальной грузоподъемности при подъеме рельсов и труб; 15 % — при подъеме стальных листов; 2,5 % — при подъеме размельченной стальной стружки; 1,5 % — при подъеме обычной стальной стружки. Допускается работа электромагнитов с грузами, имеющими температуру до 500 °С, так как при более высокой температуре у стали и чугуна уменьшаются магнитные свойства. Достоинства электромагнитов: удобство работы и простота управления, быстрая смена на крюке крана. К недостаткам относятся переменная грузоподъемность, невозможность подъема грузов, нагретых до температуры более 800 °С. Выпускают две серии электромагнитов по ГОСТ 10130—79: М — круглой формы (грузоподъемность 6... 20 т) и ПМ — прямоугольной формы (грузоподъемность 7... 17 т) с питанием постоянным током напряжением 220 и 110 В от двигатель-генераторной или выпрямительной установоки. Удерживающая сила электромагнита:
где
Рис.3.1.14 Магнитные захваты В металлургических цехах при помощи электромагнитов транспортируют стальные болванки, чугунные чушки, стальные листы и плиты, трубы, болванки, рельсы стальной и чугунный лом, стружку и другие грузы. Механизация погрузочно-разгрузочных работ при помощи электромагнитов имеет преимущества: исключается операция по зачаливанию грузов канатными или цепными стропами; захват и освобождение грузов происходят автоматически; штабеля грузов для захвата электромагнитом могут располагаться с небольшими промежутками. Все это обусловливает соответствующую экономию времени, рабочей силы и площади. Грузоподъемность электромагнитов зависит от формы и размеров поднимаемых грузов и промежутков между ними, от химического состава материала грузов и температуры. Грузоподъемность или подъемная сила электромагнитов не постоянна и изменяется при работе с чугунным литьем, листовым прокатом, мелкими стальными изделиями, скрапом и стружками, у которых неровная поверхность и относительно малые линейные размеры частиц.
Гибкие тяговые элементы
Стальные проволочные канаты Назначение – преобразование вращательного движения барабана ГПМ в поступательное движение груза. Достоинства – низкая трудоемкость изготовление и стоимость (в 6-10 раз чем цепей); высокая гибкость, несущая способность, бесшумность в работе; сглаживание (демпфирование) динамических нагрузок. Недостатки – небольшой срок службы (из-за износа), вытяжку при нагрузках, большие диметры барабанов и блоков; большая масса механизмов; возможность раскручивания; коррозия. Канат состоит из проволок (круглых) dп=0,1-2мм полученных волочением (материал сталь 60, сталь 80) сопротивление разрыву 1300…2300 МПа (130-230 Н/мм2) Круглые стальные канаты (ГОСТ 3241-80) различают: По конструкции: - одинарной свивки (без сердечника) (Рис.3.1.15, а) - двойной (с сердечником) (Рис.3.1.15, б – д) а) однослойные б) двухслойные По направлению свивки прядей: -односторонний (проволоки в пряди и сами пряди закручиваются в одну сторону -крестовой (в противоположном направлении)
Рис.3.1.15 Стальные канаты
Выбор канатов Значения внутренних напряжений зависит от многих факторов: нагрузки, конструкции, диаметра проволок, числа прядей и направления их свивки, материала сердечника и др.
Основные факторы: рабочая нагрузка, условия работы Выбор каната производится по условию:
F0>=S*kз
где F0 –суммарное разрывное усилие каната в целом (агрегатная прочность), S-наибольшее натяжение ветви каната, kз- коэффициент запаса прочности Таблица 3.1.8
Для опасных условий (транспортировка расплавленого металла, шлака, ядовитых и взрывчатых веществ) (kз не менее 4,5), при людском подьеме (kз =9) [6]. Цепи Круглозвенные цепи По типу: -короткозвенные (А) -длиннозвенные (В) По исполнению: -калиброванные (1) (тяговое усилие создается звездочками) -некалиброванные (2)) (тяговое усилие создается барабанами) Калибр определяет диаметр прутка из которого изготавливают звенья ЦЕПЬ А1 10х28 ГОСТ 2319-81 (Короткозвенная, калиброванная цепь, калибр 10 мм, шаг 28 мм). Материал изготовления: Ст2, Ст3. Браковка цепи осуществляется при удлинении звена более 3%, при уменьшении диаметра звена более 10%.
Рис.3.1.17. Тяговые звездочки
Полиспасты
Полиспастом называют механизм, состоящий из двух обойм с блоками, которые охватываются канатом или цепью. Одна обойма закреплена неподвижно на какой-либо конструкции, а вторая — подвижная и снабжена крюком или петлей. Один конец каната закреплен на обойме, а свободный соединен с приводом. Полиспасты могут быть использованы как самостоятельный механизм или они являются элементом механизма подъема груза или стрелы. В механизмах подъема неподвижную обойму закрепляют на раме крановой тележки или головке стрелы, а подвижную обойму снабжают крюком (крюковая подвеска). По назначению различают: - силовые полиспасты - скоростные (мультипликаторы) Силовые полиспасты
Предназначены для получения выигрыша в силе, уменьшения крутящего момента на барабане и передаточного числа передаточного механизма, что позволяет получить механизм подъема груза или стрелы меньших размеров, массы и стоимости. Различают полиспасты одинарные (рис. 34, а) и сдвоенные (рис. 34, б), в последних совместно работают два одинарных полиспаста, в которых, как правило, запасован один отрезок каната. У сдвоенных полиспастов в месте перехода каната с одного одинарного полиспаста на другой установлен уравнительный блок, который служит для выравнивания натяжений и длины канатов. При работе уравнительный блок не вращается, поэтому, как уже отмечалось, допускается уменьшать его диаметр. Натяжение в канате одинарного полиспаста (Рис.3.1.10)
где G –вес груза; i-кратность полиспаста; Основным параметром полиспаста является кратность. Кратность полиспаста –показатель преобразования силы:
где nв –количество ветвей полиспаста; j –количество ветвей набегающих на барабан Рекомендуемые значения кратности полиспастов подъемных механизмов приведено в табл. Таблица 3.1.10
Наибольшее натяжение подъемного каната сдвоенного полиспаста
где
где
Скоростные полиспасты
Предназначены для выигрыша в скорости (Рис. 3.1.21):
где Vкр –скорость подъема крюка, Vп –скорость поршня; i –кратность полиспаста Усилие на поршне
где Gгр –нагрузка на крюке; i –кратность полиспаста;
Рис.3.1.21 Силовые полиспасты
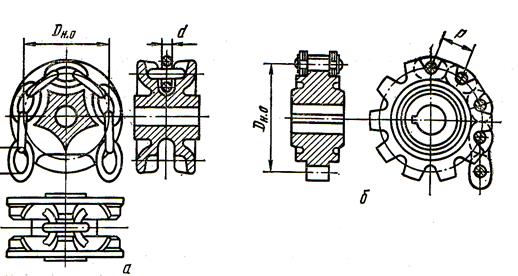
Канатные барабаны
Барабаны предназначены для преобразования вращательного движения привода лебедки в поступательное движение каната или цепи. Барабан представляет собой полый цилиндр с двумя стенками и цапфами, которые установлены на оси или валу в зависимости от направления передачи крутящего момента. Барабаны изготовляют литыми из чугуна СЧ 15 и СЧ 18 при группе режима работы механизмов М1... М4 или стали Л25 и Л35 или сварными из листовой стали Ст3 и стальных толстостенных труб при группе режима работы механизма М5…М8. Поверхность барабана может быть гладкой (рис.) или с нарезанными по винтовой линии канавками. Барабаны с гладкой поверхностью применяют в лебедках с ручным приводом и при многослойной навивке каната. При одинарных полиспастах, барабан имеет одну нарезку — левую или правую. Для сдвоенного полиспаста необходимы барабаны с двумя нарезками — левой и правой и гладкой частью между ними (рис. ). Нарезка улучшает работу каната на барабане, так как канат не расплющивается и укладывается без отклонений в канавки. Канатоемкость барабана должна быть такой, чтобы при низшем возможном положении грузозахватного органа на барабане оставались навитыми не менее 1,5 витков каната или цепи, не считая витков, находящихся под креплением каната к барабану. Барабаны с односторонней нарезкой и гладкие должны иметь по бокам фланцы-реборды, предохраняющие канат от соскакивания с барабана в случае ослабления его натяжения (канат образует петли). Со стороны крепления каната прижимными накладками можно не выполнять реборду, так как канат предохраняет от соскакивания его крепление. Барабаны различают: По способу изготовления: сварные, литые По виду материала: чугунные, стальные По виду поверхности: гладкие, нарезные (с канавками) По количеству слоев каната: с однослойной, с многослойной навивкой По способу навивки: с непосредственной навивкой, с канатоукладчиком. Основные параметры: Диаметр, шаг навивки, длина, высота реборд щина стенки.
Рис.3.1.21 Силовые полиспасты а – нарезные безребордные, б – гладкие ребордные
Диаметр барабана подъемного механизма
Таблица 3.1.11
Диаметры барабанов и блоков принимают, округляя до стандартных значений: 100; 125; 140; 160; 180; 200; 225; 250; 280; 320; 360; 400; 450; 500; 560; 630; 710; 800; 900; 1000; 1120; 1250 мм Диаметр реборд барабана
где m-число слоев навивки каната на барабан Длина каната, наматываемого на барабан
где Н – высота подъема груза. Число витков каната на барабане
где m – число слоев навивки каната Длина нарезной части барабана
где b- шаг навивки, мм (для гладких барабанов: b=dk, для барабанов с нарезкой b=dk+(1-2мм); j-количество концов каната, набегающих на барабан. Угловая скорость вращения барабана, рад/c
где V-скорость подъема груза; Rб –радиус барабана Частота вращения барабана, об/мин
Крутящий момент на барабане
Канатоукладчики Для правильной укладки каната на барабан применяют специальные устройства –канатоукладчики.
Рис.3.1.22 Типы канатоукладчиков а- канатоукладчик с направляющим блоком; б – канатоукладчик с направляющими роликами; в- винтовой канатоукладчик; г –канатоукладчик с направляющей обоймой; д – с прижимным роликом. Редукторы
В крановых механизмах применяют горизонтальные крановые редукторы типа РМ, Ц2 (рис. ) и редукторы общего назначения типа Ц2У, а также вертикальные типа ВК (рис.), ЦЗвк, ЦЗвкФ. В обозначении редукторов РМ, Ц2 и ВК указывают их тип и общее межосевое расстояние, например, РМ-650, ВК-475. У редукторов Ц2У и ЦЗвк в обозначении содержится тип редуктора и межосевое расстояние тихоходной ступени. Тихоходный вал редукторов ЦЗвк и ЦЗвкФ выполнен полым, со шлицами. При сборке он насаживается на вал приводного колеса. Такой редуктор называют навесным, от поворота его фиксируют специальным упором, который также воспринимает реактивный момент приводного колеса. Находят применение и другие типы редукторов — червячные и коническо-цилиндрические. Возможны также комбинации исполнений редукторов с открытыми передачами.
Рис.3.1.23 Типы редукторов
Таблица 3.1.12
Характеристики редукторов марки Ц2, РК
Таблица 3.1.13 Характеристики вертикальных крановых редукторов ВК
Тормозные устройства Тормоз состоит из опорной конструкции с тормозными колодками, устройства для затормаживания и для растормаживания тормоза. Торможение механизма происходит в результате создания сил трения между тормозным шкивом, закрепленным на валу механизма, и тормозной колодкой. Тормоза классифицируют по следующим признакам: 1) форме тормозных колодок: -колодочные -ленточные -дисковые -конусные 2) по назначению: -стопорные (затормаживают механизм и удерживают его в неподвижном состоянии после остановки) -спускные подтормаживают механизм и уменьшают скорость движения, - регуляторы скорости (срабатывают в случае превышения скорости сверх допускаемой) 3) по положению колодок относительно тормозного шкива: -нормально закрытые (колодки прижаты к шкиву посредством затормаживающего устройства — пружины или груза с рычагом, растормаживание с помощью привода тормоза); -нормально открытые (колодки не прижимаются к шкиву, для затормаживания прикладывается внешнее усилие); 4) по конструкции устройства для затормаживания: -пружинные, грузовые (груз на рычаге), грузоупорные (с помощью силы тяжести поднятого груза); 5) по принципу действия: -автоматические (затормаживают и растормаживают шкив без участия человека); -управляемые с помощью каких-либо устройств; 6) по исполнению приводов: -короткоходовые (рабочий ход затормаживающего устройства привода равен или близок пути перемещения тормозных колодок), -длинноходовые (рабочий ход устройства в несколько раз больше пути перемещения колодок). Согласно Правилам по кранам в механизмах подъема груза и изменения вылета должны применяться автоматические нормально закрытые тормоза. Управляемые тормоза допускают в механизмах передвижения и поворота. Для получения большего тормозного момента колодки выполняют с обкладками из материалов с повышенным коэффициентом трения. Значения коэффициента трения для трущихся поверхностей из различных материалов следующие: Сталь по стали 0,15 Сталь по чугуну 0,17 Вальцованная лента 6КВ-10 по чугуну и стали 0,42 Широкое применение получил материал ЭМ-2 (ГОСТ 15960—79), хорошо работающий в паре с чугунными или стальными шкивами при твердости поверхности трения не менее НВ 250. Этот материал имеет высокую износостойкость, стабильный коэффициент трения при нагреве шкива до температуры 200 °С. К тормозным колодкам обкладки крепятся с помощью заклепок из мягких цветных металлов. Заклепки утоплены на половину толщины обкладки, поэтому допускается ее износ только на эту толщину. Касание заклепок со шкивом приводит к интенсивному изнашиванию поверхности шкива в виде кольцевых канавок. Расчетные крутящие тормозные моменты определяют на валу механизма, на котором установлен тормоз. Такими обычно являются быстроходный вал редуктора или вал двигателя, так как на них тормозной момент наименьший. Необходимый момент тормозного устройства:
где К ЗТ – коэффициент запаса торможения (Табл.16); М –крутящий момент на валу, где установлен тормоз
Таблица 3.1.14
По величине момента тормозного устройства Мт принимают соответствующий типоразмер тормоза. Для опасных грузов предусматривают установку 2-х независимых тормозных устройств.
Колодочные тормоза
В современных ГПМ применяют различные конструкции колодочных тормозов, различающихся схемами рычажных систем. Колодочный тормоз обеспечивает торможение механизма за счет создания на шкиве тормозного момента (прижатия колодок к шкиву). Одноколодочные тормоза, создающие большой изгибающий момент, который возникает на валу шкива при торможении, практически не применяют. Широкое применение получили двухколодочные тормоза (с колодками, расположенными диаметрально в плоскости шкива), не создающие изгибающего момента. По принципу действия двухколодочные тормоза бывают нормально открытые, у которых колодки постоянно отведены от шкива (например у машины наземного транспорта), и нормально закрытые, у которых колодки постоянно прижаты к шкиву (например у механизмов ГПМ). По конструкции тормоза разделяют на замкнутые, у которых рычаги с колодками замкнуты вокруг тормозного шкива элементом тормоза (системой рычагов и тяг), и разомкнутые, не имеющие замыкающего элемента. По способу установки различают открытые (наружные) и встроенные тормоза. На современных ГПМ применяют нормально закрытые, замкнутые двухколодочные тормоза, как правило установленные снаружи (открытые). Тормоз состоит из двух кованых рычагов 2и 5 с шарнирно закрепленными на них тормозными колодками 1и 3(Рис 3.1.24, а). В свою очередь рычаги 2, 5шарнирно закреплены на основании 14. Закрывание тормоза (затормаживание шкива) производит силовая спиральная сжатая пружина 11, установленная на штоке 10в скобе 12и воздействующая на его рычажную систему. При этом левый конец пружины 11под действием внутренней силы сжатия давит на скобу 12, шарнирно связанную с рычагом 5, и прижимает колодку 3 кшкиву. Правый конец пружины 11через шайбу и гайки 9, 8тянет шток 10вправо. При этом правый конец штока свободно проходит через втулку 15, а левый его конец через гайку 18 воздействует на рычаг 2и прижимает колодку 1к шкиву. Рычаги тормоза соединены с основанием и замыкающим элементом шарнирно при помощи втулок 15, зафиксированных стопорными планками 16, и образуют шарнирный четырехзвенник. С целью исключения изнашивания верхних частей колодок при трении о вращающийся шкив (при раскрытом тормозе) на рычагах установлены штыревые пружинные фиксаторы 17. Очевидно, что закрывание такого тормоза механическим усилением сжатой силовой пружины обеспечивает простоту конструкции, удобство управления и, главное, надежную работу тормоза. Осуществление этой операции каким-либо видом привода (электрически, гидравлически и др.) невозможно, так как в случае перерыва подачи энергии (отключение, обрыв кабеля, нарушение герметичности и т.д.) тормоз будет открыт (механизм расторможен) и возникнет аварийная ситуация. Применявшееся ранее закрывание тормоза при помощи силы тяжести дополнительного груза требовало более сложной рычажной системы, ее частой регулировки, увеличивало размеры и массу тормоза, вызывало повышенный шум при работе и, вследствие значительной инерции груза, увеличивало время срабатывания тормоза. В настоящее время такие системы не применяют. Для раскрыва   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 измов на опорных металлоконструкциях)
измов на опорных металлоконструкциях)



 ,
,




 ,
, -магнитодвижущая сила; S-площадь контакта; Rв,Rм- магнитное сопротивление
-магнитодвижущая сила; S-площадь контакта; Rв,Rм- магнитное сопротивление

 ;
; -кпд полиспаста
-кпд полиспаста
 ,
, -кпд полиспаста
-кпд полиспаста

 -кпд блока (0,97-0,99)
-кпд блока (0,97-0,99) ,
,




 ,
,
 ,
, ,
,
 ,
, ,
, ,
,

 ,
,