|
|
Крановые электроприводы с тиристорными преобразователямиВ настоящее время подавляющее большинство крановых электроприводов базируется на применении асинхронных двигателей с фазным ротором и обеспечивает регулирование скорости в пределах (3: 1) — (4: 1), что часто бывает недостаточно. Стремление повысить производительность кранового оборудования путем увеличения скорости, мощности электроприводов, диапазона регулирования, улучшения динамических характеристик потребовало использования тиристорных электроприводов. В крановом оборудовании используются тиристорный электропривод постоянного тока — тиристорный преобразователь — двигатель (ТП—Д) и две системы тиристорного привода переменного тока: тиристорный преобразователь частоты — двигатель (ТПЧ—Д) и тиристорный регулятор напряжения — двигатель (ТРН—Д). Тиристорный привод постоянного тока (система ТП—Д ) для кранов имеет три исполнения: С реверсивным выпрямителем в цепи якоря. Система является наибо С нереверсивным выпрямителем, где для реверсирования двигателя ис Система с нереверсивным выпрямителем в главной цепи и реверсом в цепи обмотки возбуждения — используется в основном для мощных электроприводов (выше 300 кВт), имеющих малую частоту включения, напримерпривод крупных разливочных кранов с двигателем мощностью до 1000 кВт. Для механизма подъема используются тиристорные электроприводы постоянного тока мощностью до 630 кВт. Диапазон регулирования скорости электроприводов с обратной связью по напряжению составляет от 10:1 до 12:1, а с учетом возможного ослабления поля двигателя — до 25: 1. При использовании обратной связи по скорости и многоконтурных структур управления электроприводом можно получить диапазон регулирования скорости до 25: 1, а с учетом ослабления поля —до 50:1, т. е. получить скорость подъема — спуска груза до 200 мм/с. На рис. 3.1.33 представлена схема кранового электропривода постоянного тока, выполненная по системе ТП—Д. Привод — реверсивный с двумя преобразователями UZ1,UZ2 в цепи якоря двигателя М и одним нереверсивным преобразователем UZ3 в цепи обмотки возбуждения двигателя ОВМ. Управление приводом осуществляется с помощью командоаппарата SA. В схеме используется обратная связь по скорости и по току.
Рис. 3.1.33. Схема тиристорного электропривода постоянного тока кранового механизма: БЯ— блок питания; БУ — блок управления; БТО — блок токового ограничения;
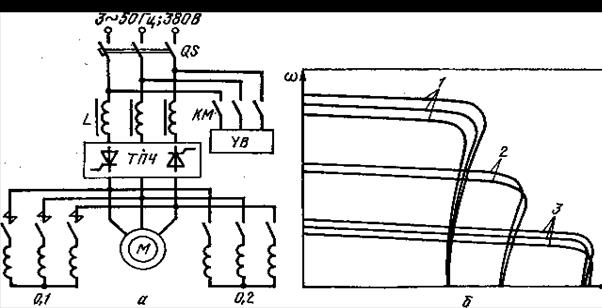
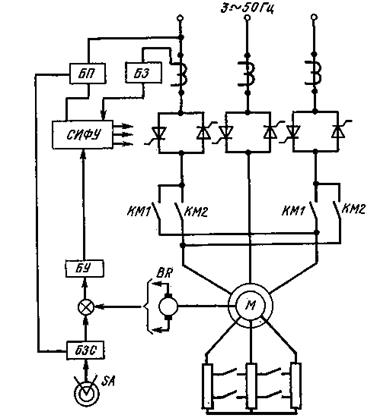
Использование в крановых электроприводах системы тиристорный преобразователь частоты — двигатель позволяет применять надежный, короткозамкнутый асинхронный электродвигатель при широком диапазоне регулирования скорости. Наибольшее применение нашли тиристорные преобразователи частоты с непосредственной связью, как более простые по схеме. Однако регулирование частоты здесь осуществляется в диапазоне 5—20 Гц, что позволяет регулировать скорость в диапазоне не выше 4:1. Для расширения диапазона регулирования используются двухскоростные асинхронные двигатели, обмотки которых имеют смешанное питание от сети 50 Гц и от преобразователя частоты. Применение преобразователя частоты в системе с полюсно-переключаемыми двигателями, позволяет значительно увеличить плавность, диапазон регулирования (до 60: 1). На рис. 3.1.34, а представлена схема, а на рис. 3.1.34, б — механические характеристики комбинированного электропривода с двухскоростным двигателем. Для расширения диапазона регулирования скорости в схеме выполняется поочередное подключение преобразователя частоты ТПЧ к тихоходной (семейство характеристик 3) и быстроходной (семейство характеристик 1) обмоткам. Семейство характеристик 2 обеспечивается при подключении к сети тихоходной и быстроходной обмоток. Реверс двигателя осуществляется изменением порядка коммутаций тиристоров ТПЧ последний одновременно выполняет функции бестокового коммутатора. Регулирование скорости по системе ТРН — Д осуществляется в большинстве случаев изменением подводимого к статору напряжения по схемам, изображенным на рис. 3.1.34. На рис. 3.1.35 представлена типовая схема кранового электропривода переменного тока по системе ТРН—Д с двигателем мощностью 125 кВт. Реверсирование осуществляется контакторами КМ1, КМ2 в цепи статора. Однако для мощных крановых приводов используются вместо контакторных тиристорные реверсоры. Регулирование скорости осуществляется совмещением двух способов — в цепи статора и в цепи ротора, причем коммутация ступеней реостата в цепи ротора может также осуществляться тиристорным устройством. Недостатком электропривода по системе ТРН—Д является повышенный удельный расход электроэнергии.
Рис. 3.1.34. Схема (а) и механические характеристики (б) комбинированного электропривода крана: QS — автомат; ТПЧ — преобразователь частоты; КМ — контактор тормозного электромагнита; О1 — быстроходная обмотка; О2 — тихоходная обмотка
Рис. 3.1.35 Схема кранового электропривода по системе ТРН-Д: БП — блок питания; БЗ —. блок защиты; СИФУ — система импульсно-фазового управления; БУ —блок управления; БЗС — блок задания скорости; SА — командоаппарат; КМ1, КМ2 — реверсивные контакторы.; ВR — тахогенератор
Гидравлический привод. В настоящее время гидравлический привод механизмов грузоподъемных машин находит все более широкое применение благодаря наличию ряда преимуществ этого типа привода, к которым относятся: 1) большая перегрузочная способность по мощности и по моменту; возможность передавать большие моменты и мощности при малых размерах и весах гидропередачи; 2) возможность бесступенчатого регулирования скоростей в широких пределах; 3) возможность плавного реверсирования и частых быстрых переключений скорости движения; 4) легко осуществимое автоматическое предохранение машины и гидропередачи от перегрузок; 5) возможность дистанционного управления работой машины, регулирование и автоматизация рабочего процесса, достигаемая простыми средствами; 6) малый момент инерции вращающихся масс с большими ускорениями и замедлениями; 7) возможность одновременного подвода энергии к нескольким рабочим механизмам; 8) устойчивая работа при любых скоростных режимах; 9) высокая износоустойчивость элементов гидропривода. В настоящее время с гидравлическим приводом выпускаются стреловые самоходные краны на безрельсовом и железнодорожном ходу, а в отдельных случаях плавучие, портальные и мостовые краны. Применение гидравлических приводов механизмов подъема, поворота и изменения вылета портальных кранов позволило существенно увеличить производительность крана, так как скорость поворота и подъема может автоматически регулироваться в зависимости от величины транспортируемого груза, предельная величина которого также устанавливается автоматически в зависимости от вылета стрелы. Так как гидрофицированные механизмы кранов могут работать при постоянном включении и постоянной скорости вращения электродвигателей, это дает возможность применять наиболее надежные и дешевые электродвигатели с короткозамкнутым ротором. Гидравлический привод грузоподъемных машин имеет приводной двигатель, насос, подающий рабочую жидкость, используемую как средство преобразования и передачи энергии в рабочий цилиндр или гидродвигатель, исполнительный механизм и систему трубопроводов клапанов управления. Давление жидкости в приводах современных грузоподъемных крана достигает 250 ат. Увеличение давления способствует уменьшению габаритов передачи и потерь на трение, но одновременно увеличивает подъемные потери и требует повышения надежности уплотнений. Гидродвигатели, преобразующие энергию потока жидкости в механическую энергию, так же как и насосы, подразделяются на роторные неротационные. К числу неротационных гидродвигателей относятся силовые цилиндры, которые значительно проще конструктивно, дешевле и более надежны в работе, чем роторные гидродвигатели. Поэтому они получили широкое применение в различных подъемно - транспортных машинах. В этих приводах жидкость, нагнетаемая насосом в силовой цилиндр, перемещает в нужном направлении поршень со штоком и части машины, соединенные со штоком. При этом наиболее просто осуществляется прямолинейное возвратно-поступательное движение, но движение штока может быть использовано и для получения вращательного движения. В случае необходимости совершения работы на большом пути перемещения, когда применение силовых цилиндров становится нецелесообразным, в качестве гидродвигателя используют роторные двигатели с вращательным выходным движением, подразделяемые на гидродвигатели малого момента и гидродвигатели высокого момента. Применение в гидроприводах грузоподъемных машин высокомоментных гидродвигателей, позволяющих приводить механизмы в движение непосредственно от вала гидродвигателя без использования редукторов, является весьма перспективным. Однако низкомоментные гидродвигатели имеют меньшие колебания угловой скорости выходных валов и в несколько раз большую глубину регулирования, чем высокомоментные гидродвигатели. Плавное, бесступенчатое регулирование числа оборотов вала гидродвигателя достигается или изменением расхода жидкости (использование насосов регулируемой производительности), или путем изменения рабочего объема двигателя, или дросселированием (изменением величины потока рабочей жидкости, подводимой к гидродвигателю). Каждый механизм грузоподъемной машины с гидравлическим приводом может выполняться как с индивидуальным приводом, так и с групповым приводом при питании нескольких гидродвигателей от одного насоса. Групповой привод находит применение в машинах малой грузоподъемности, а также в тех случаях, когда приводы нескольких механизмов вместе с гидродвигателями перемещаются относительно других приводов. При групповом приводе возможна как поочередная работа механизмов, так и одновременная работа механизмов, в зависимости от выбранной производительности насоса и мощности привода. Существенным отличием гидравлического привода от механического является отсутствие жесткой связи между приводным двигателем и рабочим органом механизма. Это свойство гидропривода обеспечивает предохранение привода и рабочего органа от перегрузок, но в то, же время неизбежное наличие утечек уменьшает скорость вращения вала гидродвигателя или скорость перемещения поршня гидроцилиндра и приводит к тому, что невозможно остановить вал гидродвигателя затормаживанием приводного электродвигателя, если на вал гидродвигателя действует статическая нагрузка. Так как для большинства механизмов грузоподъемных машин по перемещению рабочего органа при выключенном приводе является нежелательным, то основным критерием пригодности гидропривода для механизмов грузоподъемных машин является возможность работы со статической нагрузкой и величина допускаемого перемёщения от нее при остановленном приводе. В двигателях вращения поршневого типа утечки составляют 2 - 3%, а в лопастных двигателях могут даже превысить 10%. Поэтому если опускание максимального груза со скоростью от 2до 10% от номинальной скорости является недопустимым, то для удержания поднятого груза в неподвижном состоянии следует установить тормоз на валу барабана. В механизмах передвижения и поворота, где нет постоянной статической нагрузки, нет необходимости в установке тормоза и полную остановку механизма можно производить путем затормаживания ведущего вала. В механизмах подъема применение гидропривода обеспечивает плавное регулирование скоростей подъема и спуска в весьма широком диапазоне. Так, при применении гидромашин лопастного типа диапазон регулирования можно получить порядка от 8 до 15, для гидромашин поршневого типа — от 20 до 25. Минимальная величина скорости опускания груза ограничивается величиной утечек в гидродвигателе и при малых нагрузках существенно снижается. В механизмах изменения вылета передвижных кранов и кранов экскаваторов обычно применяется гидропривод поступательного движения как в случае качающейся, так и в случае телескопической выдвижной стрелы. Эта система обеспечивает существенное упрощение конструкции механизма. Очень часто совмещают качание стрелы с телескопическим выдвижением части ее, что повышает маневренность крана и позволяет совместить большой вылет с малыми габаритами механизма. В мостовых кранах гидропривод находит также все большее применение. Так, для механизмов передвижения мостовых кранов создан гидропривод с использованием высокомоментных гидродвигателей. Механизм выполнен по схеме раздельного привода с системой синхронизации движения концевых балок. Приводы размещены непосредственно около концевых балок (рис.3.1.36)
Рис. 3.1.36 Гидравлический механизм с высокомоментным двигателем.
Каждый гидропривод состоит из радиально-поршневого регулируемого насоса 5 типа НДП, 1; приводимого в движение от асинхронного короткозамкнутого двигателя и высокомоментного гидродвигателя типа ВГД-400, соединенного валом-вставкой с ходовым колесом. Кроме того, в состав привода входит узел управления, монтируемый в кабине крановщика, и система трубопроводов. Насос 5 при увеличении объема рабочей камеры создает вакуум, вследствие чего под действием атмосферного давления рабочая жидкость засасывается из бака и затем нагнетается через реверсивный золотник 3 в высокомоментный гидродвигатель 1, вращающий ходовое колесо. Из сливного канала гидродвигателя жидкость через реверсивный золотник 3 поступает к всасывающей полости насоса 5. Реверсивное устройство 3 золотникового типа с электрогидравлическим управлением предназначено для реверсирования вращения гидродвигателя и перекрытия трубопроводов. Крайние положения золотника 3 используются для получения реверса, а средние — для перекрытия потоков жидкости и торможения механизма. При торможении крана или при аварийном выключении тока золотник перемещается в среднее положение и перекрывает потоки жидкости. Мостовой кран, двигаясь по инерции, вращает ротор гидродвигателя, и жидкость перемещается из одной ветви трубопровода в другую и действует на один из клапанов тормозного устройства 2. Меняя степень сжатия пружины клапана, можно получить различные тормозные характеристики. Пиковые нагрузки при пуске и торможении ограничиваются предохранительным клапаном, расположенным в насосе, дроссельным устройством 4 и тормозными клапанами гидродвигателя. Дроссели 4 служат также для автоматической синхронизации движения концевых балок моста крана при различных сопротивлениях движению каждой из них. Принцип действия дросселя 4 основан на отводе определенного количества жидкости, пропорционального разности нагрузок, от нагнетающей полости насоса. Пружина дросселя настраивается на преодоление давления жидкости, соответствующего 125% номинального момента гидродвигателя. При дальнейшем увеличении давления поршень дросселя перемещается, сжимая пружину и открывая отверстие соответствующего размера, и определенное количество жидкости отводится в бак от насоса забежавшей стороны. Регулирование скорости вращения вала гидродвигателя осуществляется посредством изменения производительности регулируемого гидронасоса. Производительность насоса, регулируемая величиной эксцентриситета насоса, зависит от давления на выходе редукционного клапана 6. Узел управления с редукционным клапаном 6 монтируется в кабине крановщика и для удобства выполнен педального типа. Исследования показали, что гидропривод с высокомоментным гидродвигателем в механизмах передвижения мостовых кранов имеет следующие преимущества перед электромеханическим приводом: 1. Значительно упрощается механическая часть и электрическая схема: отсутствуют редукторы, муфты, трансмиссия, тормоза, нет необходимости в применении регулируемых электродвигателей и сложной электрической аппаратуры, что приводит к снижению на 20% веса и стоимости механизма. 2. Обеспечивается бесступенчатое и плавное регулирование скорости при постоянном моменте на валу гидродвигателя, плавный пуск и торможение. Процесс пуска и торможения происходит без колебательных нагрузок в упругих звеньях механизма, что благоприятно влияет на работу крана, подкрановых путей и зданий цехов.
  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|