
|
|
ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ И УСИЛИЙ ПО ПРИБЛИЖЕННЫМ УРАВНЕНИЯМ РАВНОВЕСИЯ И ПЛАСТИЧНОСТИСтр 1 из 12Следующая ⇒ ДЕФОРМАЦИИ ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ И УСИЛИЙ ПО ПРИБЛИЖЕННЫМ УРАВНЕНИЯМ РАВНОВЕСИЯ И ПЛАСТИЧНОСТИ ОБОСНОВАНИЕ МЕТОДИКИ Для вычисления усилий деформирования при том или ином технологическом процессе обработки металлов давлением необходимо найти закон распределения нормальных и касательных напряжений на поверхностях контакта деформирующего инструмента и металла. Основным методом решения такой задачи является решение дифференциальных уравнений равновесия совместно с условием пластичности. При этом считают, как указывалось в предыдущей главе: а) температуру металла в каждый момент деформации одинаковой по всему объему металла (включая контактные поверхности); б) деформируемый металл однородным и изотропным с усредненными по объему свойствами. Однако для объемного напряженного состояния в общем виде система дифференциальных уравнений равновесия не имеет решений в замкнутом виде. Это обстоятельство вынуждает осуществлять приведение механической схемы деформации либо к плоской, либо к осесимметричной. При многих технологических процессах, как например, при прокатке широких листов, ковке под прессом и молотом узкими бойками широких плит, некоторых видах ковки и прокатки в ручьях (калибрах), уширение металла в процессе деформации мало в сравнении с удлинением, и им можно пренебречь. Тогда считают, что процесс деформирования параллельных сечений в некотором удалении от свободных концов полосы протекает идентично. Такие технологические процессы можно рассматривать как случаи плоского деформированного состояния. С другой стороны, некоторые случаи нагружения, например, растяжение толстостенной трубы под действием внутреннего равномерного давления при отсутствии осевых сил, растяжение вращающегося диска центробежными силами, отбортовка листового металла и т. д., могут быть приведены к плоскому напряженному состоянию. Примерами осесимметричных задач являются: осадка в торец цилиндрической поковки, выдавливание металла из цилиндрической или конической матрицы, прошивка (открытая и закрытая) цилиндрических поковок, волочение круглых прутков и проволоки и т. п. Таким образом, большинство технологических процессов можно привести к плоской или осесимметричной задаче. Исключение составляют, например, такие процессы: а) ковка и "прокатка толстых плит, ширина которых соизмерима с толщиной, а ширина бойка (или дуга захвата при прокатке) мало отличается от ширины плиты; б) выдавливание сложных несимметричных профилей; в) широкий класс несимметричных поковок сложной формы и некоторые другие. Однако иногда представляется возможным рассматривать деформируемое тело как состоящее из ряда объемов, деформируемых в условиях либо плоской, либо осесимметричной задачи. Разумеется, чем ближе технологический процесс к тому или иному типу задачи, тем ближе к действительности будут получаемые решения. Несмотря на то, что дифференциальные уравнения равновесия и условие пластичности для плоской задачи и осесимметричной задачи значительно проще уравнений объемной задачи, они все же при полной пластичности решаются в замкнутом виде лишь для частных случаев, когда касательные напряжения на контактных плоскостях либо равны нулю (случай деформации при отсутствии контактного трения), либо постоянны. Такие решения для случая отсутствия трения, например, получены для деформации толстостенной трубы под действием внутреннего и внешнего давления В. В. Соколовским [34], [35 ], А. Надаи [27], волочения через коническую матрицу и прокатки — К. Н. Шевченко [57]. Для случая постоянства трения на контактных поверхностях имеются решения для плоской осадки призматического бруска шероховатыми плитами (Л. Прандтль) [30], пластического равновесия плоского клина (А. Надаи, В. В. Соколовский), пластического равновесия металла в области, ограниченной конической поверхностью (В. В. Соколовский), и т. д. Для случая произвольного изменения касательных напряжений, вызванных силами трения на контактных поверхностях, система уравнения равновесия для плоской и осесимметричной задачи, совместно с условием пластичности, решений в замкнутом виде не. имеет. Однако, как это указано в предыдущей главе, для инженерных расчетов в ряде случаев представляется возможным путем использования дополнительных допущений привести задачу к решению одного обыкновенного дифференциального уравнения взамен системы дифференциальных уравнений равновесия в частных производных, а также и придать условию пластичности линейную форму. Таким образом, для плоской и осесимметричной задач можно получить приближенные уравнения равновесия и пластичности и осуществить точное решение этих приближенных уравнений. Преимущество такого метода заключается в возможности предварительно оценить ошибку, вносимую принимаемыми допущениями, а также в возможности анализа влияния различных параметров процесса на величину деформирующего усилия. Ниже будет подробно рассмотрена методика получения приближенных уравнений и будут даны примеры их практического использования для решения конкретных задач по определению усилий деформирования при различных операциях обработки металлов давлением. Рассматривая основные технологические процессы горячей обработки металлов давлением, можно прийти к убеждению, что подавляющее большинство из них (может быть, лишь кроме гибки и закручивания) протекает в условиях значительного влияния сил трения на контактных поверхностях. Экспериментально установлено также, что чем больше отношение контактной поверхности Fk к свободной поверхности деформируемого металла Fc, тем больше необходимое усилие и удельное давление деформирования. Естественно поэтому, что наибольший для практики (с точки зрения расчета деформирующего усилия); интерес представляют именно процессы деформи-рования со значительной величиной отношения Касательные напряжения, вызванные силами трения на контактных поверхностях, вообще говоря, не постоянны и могут изменяться по тому или иному закону. Однако можно утверждать, что по одному из сечений деформируемого тела они распределены таким образом, что имеют максимальное значение на контактной поверхности и равны нулю на нейтральной оси сечения. Далее, замечая, что в дифференциальных уравнениях равновесия для плоской и осесимметричной задач напряжения зависят от двух координат, в поисках дальнейшего упрощения, поставим перед собой более простую задачу — определить нормальные напряжения не в каждой точке объема тела, а лишь в каждой точке контактной поверхности. Решение этой задачи является достаточным для целей практики, так как интеграл нормальных напряжений по проекции контактной поверхности на плоскость, перпендикулярную к направлению действия равнодействующей усилия деформирования, сразу же даст величину усилия деформирования, вычисление которого и является нашей главной задачей. Частное от деления полученной величины на площадь проекции контактной поверхности представляет собой среднее удельное давление деформирования. При решении задачи определения нормальных напряжений только на контактной поверхности, т. е. при определенных значениях одной из координат естественно допустить, что нормальные напряжения не зависят от этой координаты. Последнее даст возможность использовать только одно из двух уравнений равновесия и свести систему уравнений в частных производных к одному уравнению уже в обычных производных. Физический смысл этих упрощений сводится к усреднению напряжений по одной из координат. На основании изложенного выведем приближенные уравнения равновесия для плоской и осесимметричной задачи применительно к наиболее распространенным технологическим процессам обработки металлов давлением. Рис.8.1. Схема напряжений при осадке призматического Рис. 8.2.Схема напряжений при осадке клиновидной поковки под Плоскими плитами мальные напряжения зависят только от Для вывода приближенного уравнения равновесия из системы уравнений равновесия для плоской задачи в полярных координатах
воспользуемся первым уравнением и проинтегрируем его по
откуда, выполняя интегрирование и подставляя пределы интеграции, находим следующее приближенное уравнение для плоской задачи в полярных координатах:
Так же, как и в предыдущем случае, это уравнение может быть получено из первого уравнения (8. 3) подстановкой значения
вытекающего из допущения о линейном распределении касательных напряжений по толщине поковки. Рис.8.3. Схема напряжений при осадке цилиндрической поковки Под плоскими плитами от нуля на горизонтальной плоскости сечения поковки, проходящей через ее центр, до максимального значения
и интегрируем его по z в пределах от 0 до
Выполняя интегрирование, подставляя значения пределов и произведя необходимые преобразования, имеем следующее приближенное уравнение равновесия для осесимметричной задачи в цилиндрических координатах:
Этот же результат можно получить, подставив в первое из уравнений (8.5) значение Необходимо отметить, что относительно нормальных напряжений на «активной» контактной поверхности (в данном случае плоскости, через которую передается деформирующее усилие) уравнения (8. 2), (8. 4) и (8. 6) по существу являются не приближенными, а лишь ограниченными (поскольку определяются напряжения только на контактных плоскостях, т. е. при постоянном значении одной из координат) [40]. Как мы покажем в дальнейшем, решение этих уравнений для частных случаев закономерностей касательных напряжений весьма точно сходится с решениями уравнений (8. 1), (8. 3) и (8. 5), которые в дальнейшем в целях противопоставления уравнениям (8. 2), (8. 4) и (8. 6) мы будем называть «точными». Рис.8.4. Схема напряжений при выдавливании металла Из цилиндрической матрицы Комбинируя первый и третий члены, замечая, что
и выполняя необходимые преобразования, находим приближенное уравнение равновесия для случая цилиндрической контактной поверхности:
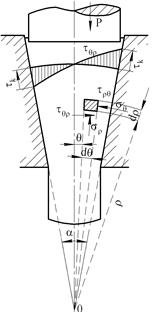
Тот же результат можно получить, допустив линейное распределение касательных напряжении по радиусу поковки, т. е. приняв Д. Выдавливание и волочение металла через коническую матрицу (рис.8.5) Для вывода приближенного уравнения равновесия применительно к рассматриваемому случаю уже не достаточно принятых в предыдущем случае допущений. В целях получения уравнения, достаточно простого для дальнейшего интегрирования, для случая осесимметричной задачи в сферических координатах примем еще два дополнительных допущения:
Рис. 8.5. Схема напряжений при выдавливании или волочении Через коническую матрицу 1. Следуя В. В. Соколовскому, полагаем 2. Допускаем, что угол при вершине конуса настолько мал, что можно положить Дифференциальные уравнения равновесия в сферических координатах для осесимметричной задачи будут
Тогда, интегрируя первое уравнение (8.8) по
откуда, проводя необходимые преобразования, находим следующее приближенное уравнение равновесия в сферических координатах:
Отметим, что к такому же результату можно прийти непосредственной подстановкой в уравнение (8.8) значения
Легко заметить, что при решении уравнений (8.7) и (8.9) (последнего для малых углов при вершине конуса) можно получить для распределения напряжений на цилиндрической и конической поверхностях матрицы точность результатов, аналогичную точности решений уравнений (8. 2), (8. 4) и (8. 6). Однако при определении осевых напряжений, что, в частности, для расчета усилия выдавливания или волочения представляет наибольший интерес, точность уравнений (8. 7) и (8. 9), которая, естественно, будет ниже [48].Это легко объяснить тем, что допущение о независимости нормальных напряжений в сечении, перпендикулярном к продольной оси матрицы, от координаты Таким образом, в результате упрощений мы имеем пять достаточно простых дифференциальных уравнений равновесия, удобных для решения практических задач определения напряжений на контактных поверхностях при различных схемах деформирования. МЕТОД РАБОТ
Метод работ основан на положении, что при пластической деформации работа внешних сил равна сумме работ внутренних сопротивлений [6]. При деформации нужно затратить работу на преодоление внутренних сопротивлений, определяемых прочностными свойствами тела, и на преодоление сил внешнего трения. Работа внешних сил равна разности работ активных сил, развиваемых машиной, и сил внешнего трения, т. е..
или
где
Определим приращение работы внутренних сил При пластической деформации начальные напряжения отличны от нуля и при незначительном изменении формы тела их можно принять постоянными. Поэтому приращение работы при пластической деформации можно определить выражением
но без коэффициента 1/2:
Подставим в это выражение значения деформаций из уравнений (5.10):
Выражение в квадратных скобках равно удвоенному квадрату интенсивности напряжений Модуль пластичности второго рода
Подставив в выражение (8.17) вместо квадратных скобок
Отсюда
Работу внешних (поверхностных) сил, включая работу контактных сил трения, можно выразить так:
где X, У, Z — проекции сил на оси координат; и, v, w— соответствующие координатам перемещения. Работу сил контактного трения в общем случае можно представить так:
где
Во многих случаях работу активных сил можно определить как произведение полного усилия на перемещение инструмента (обжатие), т. е.
Тогда полное усилие
8.3. М ЕТОД ЛИНИЙ СКОЛЬЖЕНИЯ 8.3.1.: Основные понятия о линиях скольжения Метод линий скольжения, применяемый для решений плоских (и отчасти осесимметричных) задач, сущность которого будет изложена в этом параграфе, ведет свое начало от работ М. Леви (1871 г.), Г. Генки и Л. Прандтля (20-е годы) [30]. Дальнейшее развитие он получил в работах советских ученых А. А. Ильюшина, А. Ю. Ишлинского, С. Г. Михлина, В. В. Соколовского, С. А. Христиановича и др., а также ряда иностранных ученых, как, например, Г. Гейрингер, В. Джонсона, Е. Ли, В. Прагера, Э. Томсена, Ф. Г. Ходжа, Р. Хилла. В теории процессов ковки и штамповки этим методом с успехом пользовались А. Д. Томленов, К. Н. Шевченко, Л. А. Шофман, а также Е. М. Макушок, И. П. Ренне и др. Метод в конечном итоге выражается в построении сетки (поля) линий скольжения и использовании их свойств [41]. Возьмем на плоскости xz в теле, находящемся в плоском деформированном состоянии, какую-нибудь точку Так как от взятой точки
проходящих через точку а
В точке При неограниченном увеличении числа точек а и точек а' ломаные линии превратятся в плавные кривые ос и р (рис.8.8), представляющие собой траектории главных касательных напряжений или линий скольжения. Из каждой точки а и а' (рис.8.7) данной пары линий скольжения можно начать построение других линий скольжения. В результате получим ортогональную сетку (поле) линий скольжения (рис.8.8), в общем случае криволинейную из двух семейств линий Из рассуждений, на основании которых показана возможность построения поля линий скольжения, явствует, что для разных напряженных состояний поля линий скольжения различны и каждому определенному напряженному состоянию соответствует определенное поле линий скольжения. Касательные к каждой из двух линий скольжения в любой точке совпадают с направлением главных касательных напряжений и пересекают ось х под какими-то углами Так же как сетку линий скольжения, можно построить ортогональную сетку траекторий главных напряжений. Эти траектории пересекают линии скольжения под углом Из рис. 8.9 следует, что для линий скольжения соответственно семейств
где
Рис. 8.9. Линии скольжения
Уравнения (8.24) представляют собой дифференциальные уравнения линий скольжения. Линии скольжения реально отображаются в деформируемом теле в виде линий Людерса—Чернова. Выпишем теперь формулы (3.48), выражающие компоненты напряжений при плоском деформированном состоянии в функции угла
Заменим в этих выражениях угол В результате получим
Заметим, что выражения (8.25) обладают тем свойством, что они тождественно удовлетворяют условию пластичности (6.17):
Действительно, подставляя уравнения (8.25) в (6.17), получим
Следовательно, в дальнейшем при оперировании выражениями (8.25) можно не обращаться к условию пластичности, поскольку последнее будет удовлетворяться при любом значении
получим
.Перейдем в уравнениях (8.26) к криволинейной системе координат Поскольку сетка линий скольжения является вполне закономерной, постольку можно рассматривать, например, линии О'
Рис. 8.10. Схема для перехода к криволинейной системе координат
Как во всякой системе координат, в рассматриваемом случае при перемещении точки а вдоль одной из координатных линий, например, вдоль линии Поместим теперь начало координат О системы В бесконечно малой окрестности точки а элементы дуг системы
Угол же
Поскольку точка а при выводе (8.27) являлась произвольной, постольку эти уравнения будут действительны для любой точки. Таким образом, от координат х, z в (8.26) мы перешли к новым координатам Интегрируя уравнения (8.27), первое по
. В приведенное выше решение следует внести корректив, поскольку мы интегрировали уравнения в частных производных. Дело в том, что при дифференцировании по одной переменной функция другой принимается за постоянную и производная ее обращается в нуль. Следовательно, уравнение (а) может содержать какую-то функцию от В качестве произвольных функций от
Тогда уравнения (а) и (б) можно написать в окончательной форме
Уравнения (8.28) носят название интегралов Генки. Произвольные функции Если бы линии скольжения Пусть в какой-либо точке М данной линии скольжения напряжение Подставляя эти данные, например, в первое уравнение системы (8.28), получим
Но так как при перемещении точки вдоль одной и той же линии скольжения произвольная функция не изменяется, то
соответственно другое уравнение даст
Объединяя и несколько преобразовывая последние уравнения, получим
а обозначая
Уравнение (8.30) показывает, что изменение Выражения (8.28)—(8.30) имеют существенное значение. Действительно, если дана линия скольжения, а также известно напряжение Если некоторый отрезок линии скольжения прямой, то напряженное состояние не изменяется при движении вдоль этого отрезка. Если в некоторой области прямолинейны оба семейства линий скольжения, то напряженное состояние в этой области будет однородным, и, наоборот, при однородном напряженном состоянии поле линий скольжения представляет собой сетку ортогональных прямых. Свойства линий скольжения Выделим в поле линий скольжения произвольный криволинейный четырехугольник MNQP (рис.8.11), ограниченный двумя линиями скольжения MN и PQ системы
Рис. 8.11.Произвольный криволинейный четырех- Рис. 8.12.Схема семейства линий угольник, ограниченный системами
а также
Из этих двух уравнений получим
где Таким образом, угол между касательными к двум линиям скольжения одного семейства   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 .
. и не зависят от
и не зависят от  . Замечаем также, что и в этом случае касательные напряжения
. Замечаем также, что и в этом случае касательные напряжения  , имея на контактных плоскостях максимальные значения
, имея на контактных плоскостях максимальные значения  , переходят через нулевое значение на продольной геометрической оси поковки.
, переходят через нулевое значение на продольной геометрической оси поковки. (8.3)
(8.3) с учетом сделанных предположений:
с учетом сделанных предположений:
 (8.4)
(8.4)
 на контактных плоскостях. Тогда, делая допущение о независимости нормальных напряжений от координаты
на контактных плоскостях. Тогда, делая допущение о независимости нормальных напряжений от координаты  , берем первое уравнение из системы дифференциальных уравнений равновесия для осесимметричной задачи
, берем первое уравнение из системы дифференциальных уравнений равновесия для осесимметричной задачи , (8.5)
, (8.5) ; имеем
; имеем
 (8.6)
(8.6) , т.е. допустив линейный закон изменения касательных напряжений по высоте поковки.
, т.е. допустив линейный закон изменения касательных напряжений по высоте поковки.
 (8.7)
(8.7)
 т. е. что две из трех компонент нормальных напряжений равны между собой (случай «полной» пластичности — по терминологии А. Хаара и Т. Кармана [49]).
т. е. что две из трех компонент нормальных напряжений равны между собой (случай «полной» пластичности — по терминологии А. Хаара и Т. Кармана [49]).
 (8.8)
(8.8) в пределах от 0 до
в пределах от 0 до  по углу
по углу  , и приравнивая
, и приравнивая  , имеем
, имеем
 (8.9)
(8.9)
 и
и 
 , (8.15)
, (8.15) ,
, — работа внешних сил;
— работа внешних сил; — работа активных сил;
— работа активных сил; —работа сил трения;
—работа сил трения; —работа внутренних сопротивлений, работа деформации.
—работа внутренних сопротивлений, работа деформации.
 (8.16)
(8.16) . (8.17)
. (8.17) , согласно уравнению (3.16 а).
, согласно уравнению (3.16 а). выразим через модуль пластичности первого рода Е' согласно уравнению
выразим через модуль пластичности первого рода Е' согласно уравнению  , а последний — через интенсивность напряжений и деформаций, согласно выражению
, а последний — через интенсивность напряжений и деформаций, согласно выражению  . Тогда
. Тогда
 и значение
и значение  , получаем
, получаем (8.18)
(8.18) (8.19)
(8.19) , (8.20)
, (8.20) (8.21)
(8.21)
 . (8.22)
. (8.22)
 .
.  . (8.23)
. (8.23) (рис.8.7) и отложим от нее вектор
(рис.8.7) и отложим от нее вектор  главного касательного напряжения. Перейдем в направлении этого вектора к точке
главного касательного напряжения. Перейдем в направлении этого вектора к точке  , весьма близко отстоящей от точки
, весьма близко отстоящей от точки  главного касательного напряжения на этой точке. Вектор
главного касательного напряжения на этой точке. Вектор  и т. д.
и т. д. , перпендикулярный к ранее отложенному, то аналогичным способом от точки
, перпендикулярный к ранее отложенному, то аналогичным способом от точки  можно построить вторую ломаную линию
можно построить вторую ломаную линию  и т. д.
и т. д.

 и
и 
 линии пересекаются под прямым углом. Понятно, что эти линии можно продолжить и по другую сторону от точки
линии пересекаются под прямым углом. Понятно, что эти линии можно продолжить и по другую сторону от точки  и
и  (рис.8.9), плавно изменяющимися при переходе от одной точки к соседней.
(рис.8.9), плавно изменяющимися при переходе от одной точки к соседней. . Траектории главных напряжений
. Траектории главных напряжений  и
и  , проходящие через точку а, показаны на рис.8.9. Касательные к ним являются главными осями 1 и 3, которые пересекают ось х соответственно под углами
, проходящие через точку а, показаны на рис.8.9. Касательные к ним являются главными осями 1 и 3, которые пересекают ось х соответственно под углами  .
.
 , (8.24)
, (8.24) .
.
 и
и 
 ;
; .
. (8.25)
(8.25)
 .
.

 - (8.26)
- (8.26)
 и далее), ее координата
и далее), ее координата  и далее) постоянной останется координата
и далее) постоянной останется координата  в произвольную точку а пересечения двух линий скольжения и направим оси х и z по касательным х' и z' к паре линий скольжения, пересекающихся в данной точке. Уравнения (8.25), а следовательно, и (8.26) при этом останутся в силе, так как при выводе уравнения (8.25) направления осей принимались произвольными.
в произвольную точку а пересечения двух линий скольжения и направим оси х и z по касательным х' и z' к паре линий скольжения, пересекающихся в данной точке. Уравнения (8.25), а следовательно, и (8.26) при этом останутся в силе, так как при выводе уравнения (8.25) направления осей принимались произвольными.



 и
и  в нуль не обратятся, так как угол
в нуль не обратятся, так как угол 
 (8.27)
(8.27) (a)
(a) (б)
(б) произвольной функцией от
произвольной функцией от  и
и 
 (по линии
(по линии  (по линии
(по линии  и
и  имеют постоянные значения при перемещении точки вдоль одной и той же линии скольжения соответственно системы
имеют постоянные значения при перемещении точки вдоль одной и той же линии скольжения соответственно системы  и
и  , а в другой точке N той же линии
, а в другой точке N той же линии  и
и  .
.


 ;
; .
. (8.29)
(8.29) через
через  , где
, где  (8.30)
(8.30) ср пропорционально углу поворота линии скольжения, а коэффициентом пропорциональности является величина 2k.
ср пропорционально углу поворота линии скольжения, а коэффициентом пропорциональности является величина 2k. в одной ее точке (например, из граничных условий), то уравнения (8.28)—(8.30) позволяют легко определить среднее напряжение в любой другой ее точке. Если же известно поле линий скольжения и напряжение в какой-либо одной узловой точке, то, переходя от одной узловой точки к другой, нетрудно установить распределение средних напряжений по всему полю. Зная же средние напряжения
в одной ее точке (например, из граничных условий), то уравнения (8.28)—(8.30) позволяют легко определить среднее напряжение в любой другой ее точке. Если же известно поле линий скольжения и напряжение в какой-либо одной узловой точке, то, переходя от одной узловой точки к другой, нетрудно установить распределение средних напряжений по всему полю. Зная же средние напряжения  и углы
и углы  ,
,  и
и  , используя систему уравнений (8.25), что и будет показано дальше.
, используя систему уравнений (8.25), что и будет показано дальше.



 (8.31)
(8.31)