
|
|
Соединения динамических звеньевДля упрощения математического описания, сложные автоматические системы обычно разделяют на простейшие звенья, которые могут быть соединены между собой по - разному. Различают три вида соединения динамических звеньев: - последовательное; - параллельное; - встречно – параллельное Последовательным называется такое соединение типовых динамических звеньев (см. риc. 15.9), когда выходная величина одного из них является входной величиной для последующего. При этом передаточная функция всей системы определяется уравнением:
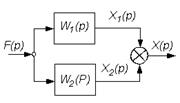
Рисунок 15.9 Последовательное соединение динамических звеньев При параллельном соединении типовых динамических звеньев (см.рис.15.10) входная величина является общей для всех звеньев, а выходные величины суммируются. Передаточная функция всей системы имеет вид:
Рисунок 15.10 Параллельное соединение динамических звеньев При встречно – параллельном соединении типовых динамических звеньев (см.рис.15.11) выходная величина первого звена подается на вход второго, а его выходная величина суммируется с общей входной величиной и подается на вход первого звена. Передаточная функция этого соединения звеньев имеет вид:
Рисунок 15.11 Встречно- параллельное соединение динамических звеньев где «+» – принимается отрицательная обратная связь; «-» – при положительной обратной связи
Устойчивость системы автоматики. Необходимым условием работоспособности любой системы автоматики является ее устойчивость. Устойчивой называется система автоматики, которая после прекращения действия возмущающих факторов стремиться к исходному или новому устойчивому состоянию, т.е. переходные процессы в ней являются затухающими. Важным показателем АСР является устойчивость, поскольку основное ее назначение заключается в поддержании заданного постоянного значения регулируемого параметра или изменение его по определенному закону. При отклонении регулируемого параметра от заданной величины (например, под действием возмущения или изменения задания) регулятор воздействует на систему таким образом, чтобы ликвидировать это отклонение. Если система в результате этого воздействия возвращается в исходное состояние или переходит в другое равновесное состояние, то такая система называется устойчивой. Если же возникают колебания со все возрастающей амплитудой или происходит монотонное увеличение ошибки е, то система называется неустойчивой. Критерии устойчивости. Для определения устойчивости системы автоматики необходимо решить дифференциальное уравнение, описывающее эту систему. Имеются также упрощенные, но достаточно точные методы, которые называются критериями (условиями) устойчивости. Можно определить, устойчива ли система автоматики и по ее логарифмическим частотным характеристикам. Для того, чтобы определить, устойчива система или нет, используются критерии устойчивости: 1) корневой критерий, 2) критерий Стодолы, 3) критерий Гурвица, 4) критерий Найквиста, 5) критерий Михайлова и др. Первые два критерия являются необходимыми критериями устойчивости отдельных звеньев и разомкнутых систем. Критерий Гурвица является алгебраическим и разработан для определения устойчивости замкнутых систем без запаздывания. Последние два критерия относятся к группе частотных критериев, поскольку определяют устойчивость замкнутых систем по их частотным характеристикам. Их особенностью является возможность применения к замкнутым системам с запаздыванием, которыми является подавляющее большинство систем управления.
Корневой критерий. Корневой критерий определяет устойчивость системы по виду передаточной функции. Динамической характеристикой системы, описывающей основные поведенческие свойства, является характеристический полином, находящийся в знаменателе передаточной функции. Путем приравнивания знаменателя к нулю можно получить характеристическое уравнение, по корням которого определить устойчивость. Корни характеристического уравнения могут быть как действительные, так и комплексные и для определения устойчивости откладываются на комплексной плоскости (см. рис. 15.12).
- Действительные: - положительные (корень № 1); - отрицательные (2); - нулевые (3); - Комплексные: - комплексные сопряженные (4); - чисто мнимые (5); По кратности корни бывают: - одиночные (1, 2, 3); - сопряженные (4, 5): si = a ± jw; - кратные (6) si = si+1 = …
Корневой критерий формулируется следующим образом: Линейная АСР устойчива, если все корни характеристического уравнения лежат в левой полуплоскости. Если хотя бы один корень находится на мнимой оси, которая является границей устойчивости, то говорят, что система находится на границе устойчивости. Если хотя бы один корень находится в правой полуплоскости (не зависимо от числа корней в левой), то система является неустойчивой. Иными словами, все действительные корни и действительные части комплексных корней должны быть отрицательны. В противном случае система неустойчива. Пример: Передаточная функция системы имеет вид:
Характеристическое уравнение: s3 + 2s2 + 2.25s + 1.25 = 0. Корни: s1 = -1; s2 = -0,5 + j; s3 = -0,5 - j. Вывод: Следовательно, система устойчива.
Критерий Стодолы. Этот критерий является следствием из предыдущего и формулируется следующим образом: Линейная система устойчива, если все коэффициенты характеристического полинома положительны. То есть, передаточная функция из примера 15.4.1 по критерию Стодола соответствует устойчивой системе.
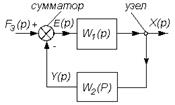
Критерий Гурвица. Критерий Гурвица работает с характеристическим полиномом замкнутой системы. Как известно, структурная схема АСР по ошибке имеет вид (см. рис.15.13) Wp - передаточная функция регулятора,
Определим передаточную функцию для прямой связи (передаточную функцию разомкнутой системы: W¥ = Wp Wy. Далее с учетом наличия отрицательной обратной связи получаем передаточную функцию замкнутой системы:
Как правило, передаточная функция разомкнутой системы имеет дробно-рациональный вид:
Тогда после подстановки и преобразования получаем:
Отсюда следует, что характеристический полином замкнутой системы (ХПЗС) можно определить как сумму числителя и знаменателя W¥: Dз(s) = A(s) + B(s). Для определения устойчивости по Гурвицу строится матрица таким образом, чтобы по главной диагонали были расположены коэффициенты ХПЗС с an-1 по a0. Справа и слева от нее записываются коэффициенты с индексами через 2 (a0, a2, a4… или a1, a3, a5 …). Тогда для устойчивой системы необходимо и достаточно, чтобы определитель и все главные диагональные миноры матрицы были больше нуля. Если хотя бы один определитель будет равен нулю, то система будет находится на границе устойчивости. Если хотя бы один определитель будет отрицателен, то система неустойчива не зависимо от числа положительных или нулевых определителей. Пример. Дана передаточная функция разомкнутой системы
Требуется определить устойчивость замкнутой системы по критерию Гурвица. Для этого определяется ХПЗС: D(s) = A(s) + B(s) = 2s4 + 3s3 + s2 + 2s3 + 9s2 + 6s + 1 = 2s4 + 5s3 + 10s2 + 6s + 1. Поскольку степень ХПЗС равна n = 4, то матрица будет иметь размер 4х4. Коэффициенты ХПЗС равны а4 = 2, а3 = 5, а2 = 10, а1 = 6, а0 = 1. Матрица имеет вид:
(обратите внимание на сходство строк матрицы: 1 с 3 и 2 с 4). Определители: Δ1 = 5 > 0,
Δ4 = 1× Δ3 = 1×209 > 0. Вывод: Поскольку все определители положительны, то АСР устойчива.
Достоинством критерия Гурвица является отсутствие необходимости отыскивать корни характеристического уравнения. Критерии удобно использовать для оценки устойчивости систем не выше 4-го, 5-го порядка. При более высоком порядке системы возникают вычислительные трудности, связанные с решением определителей высокого порядка. Кроме того при этом трудно проследить влияние какого-либо параметра системы на её устойчивость. Критерий Михайлова. Описанные выше критерии устойчивости не работают, если передаточная функция системы имеет запаздывание, то есть может быть записана в виде:
где t - запаздывание. В этом случае характеристическое выражение замкнутой системы полиномом не является и его корни определить невозможно. Для определения устойчивости в данном случае используются частотные критерии Михайлова и Найквиста. Порядок применения критерия Михайлова: 1) Записывается характеристическое выражение замкнутой системы: Dз(s) = A(s) + B(s).e-ts. 2) Подставляется s = jw: Dз(jw) =Re(w) + Im(w). 3) Записывается уравнение годографа Михайлова Dз(jw) и строится кривая на комплексной плоскости.
Критерий Найквиста. Данный критерий аналогичен критерию Михайлова, но работает с АФХ системы, поэтому более сложен для расчетов. Последовательность: 1) Определяется передаточная функция разомкнутой системы: 2) Определяется число правых корней m. 3) Подставляется s = jw: W¥(jw). 4) Строится АФХ разомкнутой системы. Для устойчивости АСР необходимо и достаточно, чтобы при увеличении w от 0 до ¥ АФХ W¥(jw) m раз охватывала точку (-1; 0), где m - число правых корней разомкнутой системы.
В случае, если характеристическое уравнение разомкнутой системы A(s) = 0 корней не имеет (т.е. m = 0), то критерий, согласно критерию, замкнутая система является устойчивой, если АФХ разомкнутой системы W¥(jw) не охватывала точку (-1; 0), в противном случае система будет неустойчива (или на границе устойчивости).
Показатели качества. Пригодность системы автоматики также определяется и по критериям качества переходных процессов. Под качеством регулирования системы автоматики понимают свойство системы поддерживать с достаточной точностью и быстротой заданный закон изменения регулируемого параметра. Если исследуемая АСР устойчива, то может возникнуть вопрос о том, насколько качественно происходит регулирование в этой системе и удовлетворяет ли оно технологическим требованиям. На практике качество регулирования может быть определено визуально по графику переходной кривой, однако, имеются точные методы, решением дифференциального уравнения системы, дающие конкретные числовые значения. Показатели качества разбиты на 4 группы: 1) прямые - определяемые непосредственно по кривой переходного процесса, 2) корневые - определяемые по корням характеристического полинома, 3) частотные - по частотным характеристикам, 4) интегральные - получаемые путем интегрирования функций.
Прямые показатели качества. К ним относятся: степень затухания y, перерегулирование s, статическая ошибка ест, время регулирования tp и др.
Предположим, переходная кривая, снятая на объекте, имеет колебательный вид (см. рис. 15.16). Рис. 15.16 Переходная кривая
По ней определяется установившееся значение выходной величиныууст. 1) Степень затуханияy определяется по формуле:
где А1 и А3 – соответственно 1-я и 3-я амплитуды переходной кривой.
2) Перерегулирование – максимальное отклонение регулируемого параметра (y макс) от установившегося значения после окончания переходного процесса. :
где ymax – максимум переходной кривой. yуст – установившееся значение регулируемого параметра после окончания переходного процесса. Большое перерегулирование вызывает чрезмерные усилия в механических узлах системы автоматики и перенапряжения в электрических узлах САУ. Для работы системы автоматики без нарушений разрешается перерегулирование в пределах 10 – 30%. 3) Статическая ошибка – отклонение регулируемого параметра от заданного значения после окончания переходного процесса:
δст = ((х - ууст) 100%) / х,
где х – входная величина. Система автоматики считается качественной если δ не более 5%. 4) Время достижения первого максимумаtм определяется по графику. 5) Время регулированияtp определяется следующим образом: Находится допустимое отклонение D = 5% ууст и строится «трубка» толщиной 2D. Время tp соответствует последней точке пересечения y(t) с данной границей. То есть время, когда колебания регулируемой величины перестают превышать 5 % от установившегося значения. 6) Число колебанийυ – регулируемого параметра в течение времени переходного процесса. Хорошая система может иметь 1 – 2 колебания.   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|




 (Символом обозначены корни уравнения).
(Символом обозначены корни уравнения). Виды корней характеристического уравнения:
Виды корней характеристического уравнения: .
. Wy - передаточная функция объекта управления.
Wy - передаточная функция объекта управления. .
. .
. .
. .
.
 ,
,
 ,
,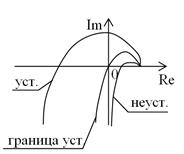 Рисунок 15.14 годографа Михайлова Dз(jw)
Рисунок 15.14 годографа Михайлова Dз(jw)
 .
. Если АФХ проходит через точку (-1; 0), то замкнутая система находится на границе устойчивости.
Если АФХ проходит через точку (-1; 0), то замкнутая система находится на границе устойчивости.
 ,
, ,
,