|
|
Повышение точности путем усреднения результатов измеренийРассмотрим некоторое средство измерений, например, измерительный модуль аналогового ввода NL-8AI для измерения и ввода в компьютер значений напряжения
Указанные причины приводят к тому, что результат измерения становится случайной величиной, значение которой изменяется от измерения к измерению. Случайная величина Погрешность средства измерений определяется изготовителем и указывается в эксплуатационной документации. В величину погрешности входит как систематическая, так и случайная составляющая. Если случайная составляющая превышает 10% от систематической, то она указывается отдельно (ГОСТ 8.009 [ГОСТ]). В некоторых случаях случайная составляющая указывается с помощью автокорреляционной функции или спектральной плотности мощности. Случайная составляющая погрешности может быть снижена путем усреднения результатов многократных измерений. Если в составе погрешности преобладает систематическая компонента, то усреднение не приводит к повышению точности. О наличии случайной составляющей можно судить по рассеянию результатов однократных измерений. Предположим, что с помощью измерительного модуля выполнено
Однако Будем считать, что результаты измерений
откуда
поскольку В (4.40) использованы два свойства оператора дисперсии: а) дисперсия произведения случайной величины и константы равна дисперсии случайной величины, умноженной на квадрат константы и б) дисперсия суммы случайных величин равна сумме дисперсий каждой из них [Гмурман]. Кроме того, считается, что все измерения выполнены одним и тем же прибором, т.е. дисперсии всех измерений одинаковы и равны Докажем первое из использованных свойств. По определению дисперсии
Поэтому, умножая Докажем теперь, что дисперсия суммы случайных величин равна сумме их дисперсий. Для этого сначала докажем, что математическое ожидание суммы случайных величин равно сумме их математических ожиданий, т.е.
Сумма случайных величин
Выведем еще вспомогательное равенство, связывающее дисперсию случайной величины с математическим ожиданием. Пользуясь определением дисперсии (4.42), получим: Поскольку
Пользуясь соотношениями (4.43) и (4.44), получим дисперсию суммы двух случайных величин в виде Итак, усреднение Во-первых, усреднение дает эффект только для случайной составляющей погрешности. Погрешность измерений перестает уменьшаться, когда Во-вторых, результаты измерений должны быть статистически независимы, т.е. интервал времени между соседними измерениями должен быть много больше времени автокорреляции случайной погрешности. Посмотрим на рис. 4.5: если при белом шуме средние значения за интервал времени В частности, требование статистической независимости измерений не выполняется также в случае, когда действует искусственная помеха, делающая шум цветным (коррелированным), например, помеха от сотового передатчика на крыше здания, от радиотелефона, из сети 50 Гц, от сварочного аппарата, от молнии, от внутренних генераторов измерительного прибора, от электродрели и т. п. В этих случаях усреднение также ослабляет помеху, но уже не в Описанный эффект имеет место только для тех законов распределения случайной величины, для которых существует понятие среднего и среднеквадратического отклонения. Например, для распределения Коши интегралы, дающие названные определения, расходятся [Косарев]. Особо следует отметить, что как систематическая, так и случайная составляющая погрешности средств измерений являются случайными величинами. Однако между ними имеется принципиальное различие. Систематическая погрешность является случайной на множестве средств измерений, но детерминированной для каждого образца из множества. Поэтому систематическую погрешность невозможно уменьшить путем многократных измерений одним и тем же прибором, но можно уменьшить, усредняя результаты, полученные измерением с помощью множества средств измерений одного типа. Случайная же погрешность является случайной на множестве результатов измерений одним и тем средством измерений и поэтому ее можно уменьшить путем усреднения результатов многократных измерений. В отличие от погрешности, разрешающая способность не зависит от величины систематической погрешности и поэтому может быть увеличена существенно. Она может стать даже меньше величины младшего значащего разряда АЦП при условии, если стабильность его уровней позволяет это сделать. На этом эффекте основан принцип действия дельта-сигма АЦП. Если в паспорте на средство измерения не указана величина случайной составляющей погрешности, ее можно оценить по результатам измерений [Орнатский]:
где коэффициент
Масштабирование – преобразование двоичного кода на выходе АЦП в число, соответствующее текущему значению физической величины. Значение выходного сигнала датчика y связано с измеряемой величиной х в общем случае монотонной зависимостью y=f (х). Для задач управления необходимо знать истинное значение измеряемой величины х, поэтому возникает необходимость вычислить х по значению показателя датчика у, т.е. нахождение функциональной зависимости x=f (у) = F -1 (y) (5.3.1.) Задача решается просто, если указанная зависимость линейная. Для большинства датчиков механических и электрических величин, датчиков уровня и некоторых других характерна линейная зависимость: у = ах + в, тогда х = -b/a (5.3.2.)
ПРИМЕР. Пусть измеряемый технологический параметр – температура, изменяется в диапазоне от 5 до 30 °С, причем датчик имеет токовый выход 0..5 mA, разрядность АЦП n=12. Входной сигнал АЦП может изменяться в пределах –10 ¸10 В, но при Rн=2кОм диапазон входного сигнала 0 ¸10В (т.е. используется половина возможностей АЦП, т.е. n=11). Пусть код на выходе АЦП, соответствующий текущей температуре, равен 1023. Максимальное число, соответствующее 11-разрядному коду, Nmax=2047. Диапазон шкалы Ашк=30 – 5 = 25 °С. Нетрудно заметить, что температура, соответствующая получаемому коду, будет равна 5 + Таким образом, обобщенная формула выглядит следующим образом: Пфиз = Хнач + где Пфиз – текущее значение параметра; Хнач – значение параметра, соответствующее минимуму шкалы; К – текущий код, полученный от АЦП; Кmax – максимальное значение кода, возвращаемого АЦП; Ашк – диапазон шкалы. Как указано выше, приведенная формула используется при линейном выходном сигнале нормирующего преобразователя. В случае если функция F-1 (у) является нелинейной, то используют один из следующих методов: - метод линейной интерполяции табличного значения F(x); - вычисление функции F-1 (у) или аппроксимацию этой функции при помощи степенного полинома Рп(у). Если функция Д(у) является нелинейной, можно выразить ее с помощью известных алгебраических и трансцендетных функций, однако этот путь довольно сложен и применяется редко. Обычно функция F(x) задается в табличном виде, например, по экспериментально снятым точкам в диапазоне предполагаемых измерений. Простейшим алгоритмом нахождения х при этом считается линейная интерполяция таблицы с заданным шагом Dх. Недостатком такого алгоритма является большой объем памяти вычислительного устройства, т.к. необходимо запоминать всю таблицу. Поэтому наиболее удобным методом оказывается аппроксимация функции Д(у) при помощи степенного полинома Рп(у) = а0 + а1 у +....аnуп При этом объем вычислений мал, а в памяти машины хранятся только п коэффициентов полинома (обычно п невелико). Для вычисления значений полинома в любой точке обычно применяется схема Горнера.
Аппроксимацию табличных данных обычно проводят либо полиномом равномерного наилучшего приближения, либо с помощью полинома регрессии. В первом случае полученный полином дает минимальное значение максимальной ошибки линеаризации в диапазоне аппроксимации, во втором - минимальное значение среднеквадратической погрешности (при фиксированной степени полинома п). Для уменьшения времени вычислений и требуемой памяти контроллера или ПЭВМ предпочтительно выбирать аппроксимирующий полином наименьшей степени, но обеспечивающий допустимую погрешность Dхдоп. Итак, если аппроксимирующий полином есть, значения измеряемой величины вычисляются по схеме Горнера на основе показаний датчика; если аппроксимирующий полином не задан и в памяти ЦВМ записана вся градуировочная таблица, то расчет значений проводится по интерполяционной формуле. В ряде АСУТП информация об измеряемых параметрах выражается в ЭВМ правильной дробью а, изменяющейся от 0 до 1 при изменении параметра от минимального до максимального значения. Тогда вычисление абсолютных величин давления, перемещения, объема, осуществляется по формуле: Pт = P max × а (5.3.3) где Pт - текущее значение параметра (кг/см2, м, м3); P max - максимальное значение шкалы датчика соответствующего параметра.
При фильтрации во временной области каждый элемент исходного сигнала заменяется последовательностью элементов, пропорциональных ему по амплитуде, но сдвинутых по времени, сумма этих элементов образует новый сигнал. Существуют различные методы фильтрации, наиболее простой реализацией отличаются методы текущего усреднения и экспоненциального сглаживания. После аналоговой фильтрации, АЦ-преобразования и ввода данных в компьютер выполняется цифровая фильтрация. Цифровая фильтрация обладает большой гибкостью, поскольку характеристики фильтра можно изменить, просто задав новые параметры соответствующей ему программы. В отличие от аналоговых, цифровые фильтры хорошо работают с длительными постоянными сигналами. В общем виде цифровой фильтр (digital filter) можно представить как
где h — это интервал выборки, ŷ — отфильтрованный выход, а у — вход. Заметим, что аргумент kh, по смыслу представляющий из себя время, можно рассматривать и просто как номер (k) в последовательности входных значений. Если все коэффициенты ai равны нулю, то такой фильтр называется фильтром скользящего среднего (Moving Average — MA) с конечной импульсной характеристикой. Это означает, что если в течение некоторого времени все последовательные значения yi кроме одного, равны нулю, то на выходе фильтра сигнал будет отличен от нуля только на т временных интервалах. Если некоторые либо все коэффициенты ai не равны нулю, то такой фильтр называется авторегрессивным (AutoRegressive — AR) и имеет бесконечную импульсную характеристику. Другими словами, входной сигнал, отличающийся от нуля только на одном временном интервале, вызовет появление на выходе сигнала, отличного от нуля в течение бесконечно долгого времени. Обобщенный фильтр, описываемый уравнением (5.9), называется авторегрессивным фильтром скользящего среднего (AutoRegressive Moving Average — ARMA). Фильтры могут быть "причинными" и "непричинными". Причинный (causal) фильтр вычисляет выходное значение на основании ранее введенных данных (в любой момент t0 учитываются входные значения только для t < t0). Поэтому все фильтры реального времени (on-line) являются причинными. Последовательность отфильтрованных значений на выходе будет отставать на некоторое время по сравнению с последовательностью на входе. Если данные обрабатываются в автономном режиме (off-line), например при анализе серии значений уже собранных измерений, можно использовать непричинный (non-causal) фильтр. В этом случае расчет для момента времени t0 можно производить на основе как предыдущих (t < t0), так и последующих (t >t0) значений.
5.3.1. Цифровые фильтры низкой частоты Для того чтобы исследовать медленно изменяющийся входной сигнал, необходимо удалить из измерительных данных случайные пики и высокочастотные наводки, которые не содержат какой-либо полезной информации. Это можно сделать с помощью цифрового фильтра низкой частоты (digital low pass filter). Структура цифрового фильтра, который эффективно удаляет резкие колебания сигнала и в то же время не влияет на медленные изменения, всегда компромиссна, потому что частотные диапазоны исходного и постороннего сигналов обычно пересекаются. Как и у аналоговых фильтров, динамика фильтра высокого порядка более эффективна для удаления нежелательных высоких частот. Два наиболее важных типа ФНЧ — скользящего среднего и экспоненциального сглаживания (exponential smoothing). ФНЧ, используемые в промышленности, почти всегда базируются на одном из этих простых фильтров. Пример.Фильтр скользящего среднего — простейший ФНЧ. Простой фильтр скользящего среднего получается, если принять все параметры ai в уравнении (5.9) равными нулю. Если необходимо простое усреднение, то все весовые коэффициенты bi равны и дают в сумме единицу. Например, фильтр скользящего среднего с пятью входными отсчетами имеет вид
Если операция фильтрации производится не в режиме реального времени, то величину скользящего среднего можно подсчитать, используя измерения как до, так и после заданного момента времени kh. В этом случае отфильтрованное значение не отстает по времени относительно входных значений. Непричинный простой фильтр скользящего среднего по пяти значениям имеет вид
Если величина на выходе представляет собой усреднение по последним п выборкам, то она смещается на 1 + п/2 циклов. При больших значениях п выходной сигнал становится более гладким, но при этом все больше отстает по времени. Импульсная характеристика фильтра скользящего среднего конечна. Для входного импульса в момент t = 0 выходной сигнал после момента t = п становится нулевым. Скользящее среднее — это простой метод, но он имеет определенные ограничения. При использовании одинаковых коэффициентов фильтр может быть излишне инертным и недостаточно быстро реагировать на реальные изменения во входном сигнале. С другой стороны, если коэффициенты различны и убывают для больших значений индекса n, то это затрудняет анализ свойств фильтра. Экспоненциальный фильтр (exponential filter) — это авторегрессионный фильтр скользящего среднего первого порядка, определяемый следующим уравнением
Отфильтрованное значение у(kh) вычисляется суммированием предыдущего значения отфильтрованного сигнала y[(k -1)h] и последнего значения y(kh) измерительного сигнала с весовыми коэффициентами. Коэффициент a лежит в интервале между 0 и 1. Уравнение (5.10) можно переписать в виде
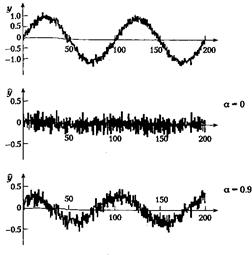
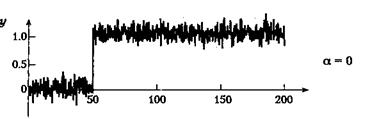
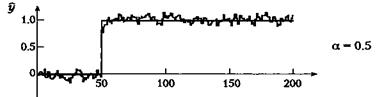
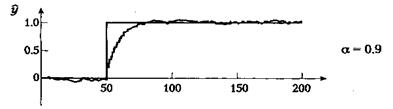
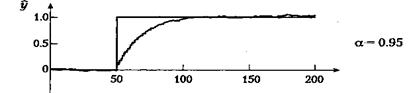
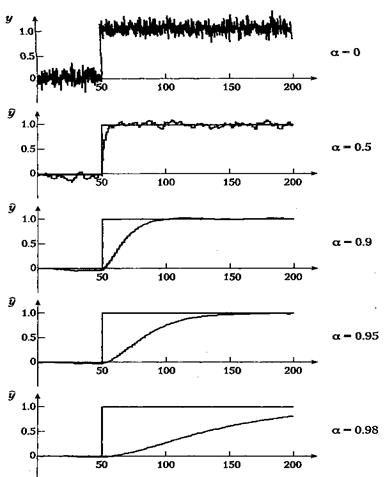
т. е. экспоненциальный фильтр уточняет отфильтрованное значение на выходе сразу, как только на вход поступает новое значение. Это уточнение невелико и становится еще меньше для значений а, близких к 1; в этом случае появляется эффект инерционности. Уменьшение шумовых компонентов выходного сигнала происходит за счет слабого соответствия с реальными изменениями на входе. При а, близком к нулю, величина поправки растет. Соответственно, фильтрация шума уменьшится, однако изменения исходного сигнала будут отслеживаться более точно. При a = 0 сигнал на выходе идентичен сигналу на входе. Влияние величины а на реакцию фильтра при скачке зашумленного входного сигнала проиллюстрировано на рис. 5.2.
Рисунок 5.2 - Влияние сглаживающего экспоненциального фильтра первого порядка
Параметр а имеет значение 0, 0.5, 0.9, 0.95 и 0.98. При малых значениях а фильтр довольно точно отслеживает изменения во входном сигнале, однако сохраняется высокий уровень шума. При больших значениях а фильтр вносит значительное запаздывание, а шум заметно подавляется. При а = 0 выходной сигнал фильтра идентичен входному.
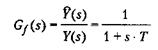
Экспоненциальный фильтр в действительности представляет собой дискретный вариант аналогового ФНЧ первого порядка с единичным статическим коэффициентом) усиления и передаточной функцией
Постоянная времени T равна R • С либо 1/R в зависимости от вида фильтра. Дифференциальное уравнение цифрового фильтра
При аппроксимации производной обратными разностями получим
что является достаточно хорошим приближением для малых значений h. Уравнение можно упростить следующим образом
что идентично уравнению (5.10) при Поскольку было принято, что h/T мало, то аппроксимация верна, только если а стремится к 1. В этом случае а можно определить следующим приближенным выражением
В действительности точное решение дифференциального уравнения (5.3.6) — это уравнение
для которого выражение (5.3.7) является хорошим приближением при малых значениях h/T. Реакция фильтра на скачок входного сигнала (рис. 5.23) иллюстрирует связь между а и Т. В течение интервала, равного одной постоянной времени Т, сигнал на выходе достигает 63 % от величины окончательного значения: при а = 0.95 постоянная времени Т равна примерно 20 интервалам выборки, а при а = 0.98 — около 50 интервалов.
Пример. Программа, реализующая экспоненциальный фильтр. Цифровой экспоненциальный фильтр [уравнение (5.10)] легко реализовать программными средствами. Ниже приведен примерный вариант программы. Функции AD_input и DA_output используются для ввода и вывода данных соответственно. Переменная delta_time есть интервал выборки, а next_time используется для синхронизации работы программы с выборкой (функция wait_until объясняется в разделе 10.6.5). program exponential_filter var in_signal, alpha: real; y_filtered, y_old: real; next_time, delta_time: real; BEGIN next_time:= 0; while true do (* бесконечный цикл *) Begin wait_until(next_time); in_signal:= AD_input (ch#l); y_filtered:= alpha*y_old + (l-alpha)*in_signal; y_old:= y_filtered; DA_output (ch#2, y_filtered); next_time:= next_time + delta_time; end; (* бесконечного цикла *) END. (* exponential_filter *)
5.3.2. Цифровые фильтры низкой частоты высоких порядков Аналоговый фильтр второго порядка более эффективен для подавления высокочастотных компонентов, чем фильтр первого порядка (раздел 5.3.2). Цифровой фильтр со структурой, определяемой уравнением (5.9), при п = т = 2 соответствует аналоговому фильтру второго порядка. Соединив последовательно два экспоненциальных фильтра первого порядка, получим фильтр второго порядка с двумя одинаковыми частотами среза
где у — значение входного сигнала, у1 — выходной сигнал первого фильтра, а у2 — выходной сигнал второго фильтра. Свойства фильтра определяются параметром а. Если исключить переменную y1(kh), то цифровой фильтр второго порядка можно записать в следующем виде
Результат применения фильтра второго порядка к сигналу, изображенному на рис. 5.2, показан на рис. 5.3. Фильтр второго порядка эффективнее подавляет высокие частоты, поэтому можно выбрать меньшее значение а. Выходной сигнал этого фильтра точнее соответствует изменениям входного сигнала, чем у фильтра первого порядка.
Рисунок 5.3 - Влияние экспоненциального фильтра второго порядка при разных значениях параметра а
Применение фильтров более высоких порядков позволяет еще больше улучшить качество выходного сигнала. Платой за это является увеличение сложности фильтра, однако стоимость обработки данных невелика. Следует отметить, что если в аналоговых фильтрах добавление пассивных электронных компонентов к цепи фильтра означает дополнительные энергетические потери в сигнале, топри программной реализации этой проблемы не существует. 5.3.3. Цифровые фильтры высокой частоты В некоторых случаях необходимо выделить высокочастотные компоненты сигналa, а не плавные изменения. Поэтому сигнал должен быть обработан фильтром высокой частоты. Разностная схема — это простой пример цифрового фильтра высокой частоты (digital high pass filter)
Выходной сигнал отличен от нуля только тогда, когда есть изменения во входном сигнале. Цифровой ФВЧ можно также получить разностной аппроксимацией аналогового ФВЧ. Соответствующее дифференциальное уравнение аналогично равнению (5.6)
де у — это входной сигнал, а у — выходной. Применив к этому уравнению аппроксимацию разностями "вперед", получим цифровой ФВЧ
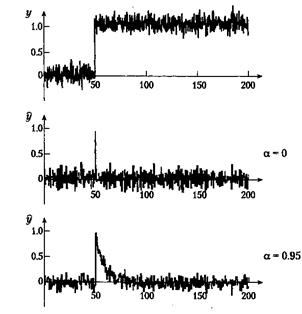
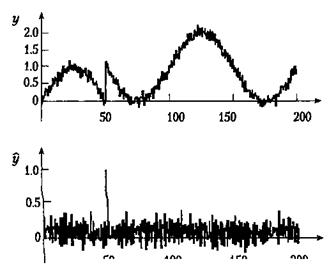
где а определяется уравнением (5.12). Дискретное уравнение фильтра можно также вывести аналитически из уравнения (5.14); в результате получим а, выраженное уравнением (5.13), значение которого должно лежать между 0 и 1. При а = 0 фильтр реализует чисто разностную схему. Следует еще раз подчеркнуть, что для применения разностной аппроксимации и уравнения (5.12) отношение h/Т должно быть достаточно мало. Чувствительность фильтра на высоких частотах определяется выбором значения а. Малое значение а приводит к большей чувствительности, которая соответствует большей частоте среза для ФВЧ. Проиллюстрируем работу ФВЧ на нескольких примерах. На рис. 5.4 представлен тот же самый скачкообразный зашумленный входной сигнал рис. 5.2. Средняя диаграмма показывает выходной сигнал чистого разностного фильтра (а = 0). Она содержит пик при t = 50, так как фильтр распознает мгновенное изменение входного сигнала. Для а = 0.95 пик при t = 50 становится шире, что показано на нижней диаграмме. На рис. 5.4 на вход фильтра поступает синусоидальный сигнал с наложенным высокочастотным шумом. Выходной сигнал ФВЧ сохраняет высокочастотные изменения, а более медленные синусоидальные колебания либо уменьшены, либо удалены. Если на зашумленный синусоидальный сигнал наложить скачкообразный, то на выходе высокочастотного фильтра появится пик, отражающий скачок во входном сигнале (рис. 5.5).
Рисунок 5.4 - Влияние фильтра высокой частоты на зашумленный синусоидальный сигнал
Рисунок 5.5 –Влияние фильтра высокой частоты первого порядка на синусоидальный сигнал. Выходной сигнал фильтра (средняя диаграмма) отслеживает только высокочастотные колебания. На нижней диаграмме показан выходной сигнал при а = 0.95 — низкочастотные компоненты присутствуют, однако с меньшей амплитудой. На верхней диаграмме показан исходный неотфильтрованный сигнал. Средняя диаграмма показывает выходной сигнал фльтра при а = 0, а нижняя диаграмма - при а = 0.95
Рисунок 5.6 Влияние фильтра высокой частоты на зашумленный синусоидальный сигнал со скачком при t = 50 (а = 0). Выходной сигнал фильтра имеет пик при. t = 50, но при этом не содержит никаких низкочастотных колебаний
23. Алгоритмы первичной обработки информации: коррекции; аналитической градуировки датчиков.
  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 (рис. 4.4). В общем случае на датчик, линию связи между датчиком и модулем и сам модуль действуют электромагнитные помехи и собственные шумы операционных усилителей, АЦП, резисторов, микропроцессорной части модуля и т. п. [Денисенко, Денисенко]. Мы не будем рассматривать помехи, действующие на объект измерений, поскольку он не входит в состав измерительного канала.
(рис. 4.4). В общем случае на датчик, линию связи между датчиком и модулем и сам модуль действуют электромагнитные помехи и собственные шумы операционных усилителей, АЦП, резисторов, микропроцессорной части модуля и т. п. [Денисенко, Денисенко]. Мы не будем рассматривать помехи, действующие на объект измерений, поскольку он не входит в состав измерительного канала.

 и среднеквадратическим отклонением
и среднеквадратическим отклонением  , которое принимается за случайную составляющую погрешности измерительного прибора. Дисперсия случайной величины
, которое принимается за случайную составляющую погрешности измерительного прибора. Дисперсия случайной величины  .
. измерений, в результате которых получены значения
измерений, в результате которых получены значения  . Усреднение результатов измерений выполняется по формуле среднего арифметического
. Усреднение результатов измерений выполняется по формуле среднего арифметического .
.
 также является случайной величиной, поскольку, выполняя несколько серий измерений и усредняя каждую из их, мы получим отличающиеся друг от друга средние значения
также является случайной величиной, поскольку, выполняя несколько серий измерений и усредняя каждую из их, мы получим отличающиеся друг от друга средние значения 

 ,
,
 .
. , а случайные величины являются некоррелированными.
, а случайные величины являются некоррелированными. и математического ожидания
и математического ожидания  случайной величины
случайной величины  .
.
 , получим:
, получим:  .
. .
.
 - это такая случайная величина, которая принимает все возможные комбинации сумм случайных величин
- это такая случайная величина, которая принимает все возможные комбинации сумм случайных величин  , т.е.
, т.е.  . Поэтому по определению математического ожидания
. Поэтому по определению математического ожидания

 . Аналогичное соотношение для
. Аналогичное соотношение для  .
. , получим
, получим .
.

 .
. раз. Однако это утверждение справедливо при соблюдении нескольких условий, выполнимость которых довольно трудно проверить на практике.
раз. Однако это утверждение справедливо при соблюдении нескольких условий, выполнимость которых довольно трудно проверить на практике. становится настолько малой, что суммарная погрешность определяется систематической составляющей.Систематическая погрешность складывается из нелинейности АЦП и операционных усилителей, температурной зависимости напряжения смещения нуля и коэффициента передачи измерительного канала (температурно-зависимые погрешности учитываются как дополнительные), низкочастотных шумов, у которых время автокорреляции больше времени выполнения серии повторных измерений (к ним относится, в частности, "старение" элементов), динамической погрешности. Практически редко удается снизить общую погрешность измерений более чем в 2...3 раза с помощью усреднения.
становится настолько малой, что суммарная погрешность определяется систематической составляющей.Систематическая погрешность складывается из нелинейности АЦП и операционных усилителей, температурной зависимости напряжения смещения нуля и коэффициента передачи измерительного канала (температурно-зависимые погрешности учитываются как дополнительные), низкочастотных шумов, у которых время автокорреляции больше времени выполнения серии повторных измерений (к ним относится, в частности, "старение" элементов), динамической погрешности. Практически редко удается снизить общую погрешность измерений более чем в 2...3 раза с помощью усреднения. и
и  равны между собой (внизу), то при коррелированном шуме - не равны (вверху). К примеру, усреднение 100 измерений в течение 10 с не может скомпенсировать компоненты шума, спектр которых лежит ниже 0,1 Гц.
равны между собой (внизу), то при коррелированном шуме - не равны (вверху). К примеру, усреднение 100 измерений в течение 10 с не может скомпенсировать компоненты шума, спектр которых лежит ниже 0,1 Гц. раз, подробнее см. следующий параграф.
раз, подробнее см. следующий параграф. ,
,
 зависит от количества измерений
зависит от количества измерений  25» 17,5 °С.
25» 17,5 °С. Ашк,
Ашк, (5.3.4)
(5.3.4)

 (5.3.5)
(5.3.5)

 (5.3.6)
(5.3.6)
 или
или 
 (5.3.7)
(5.3.7) (5.3.8)
(5.3.8)


 (5.14)
(5.14) (5.15)
(5.15)