
|
|
Принципиальная и функциональная схемы САРСтр 1 из 5Следующая ⇒ Содержание понятий: автоматика, автоматизация, САУ, САР Автоматика – наука, изучающая принципы и методы построения систем, выполняющих определенные функции без непосредственного участия человека. Автоматизация производства – это процесс в развитии производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам. САУ – Система автоматического управления включает в себя объект управления и устройство управления. САР – Система автоматического регулирования включает в себя объект регулирования и устройство регулирования (автоматический регулятор). САР предусматривает поддержание постоянной или изменяющейся по определенному закону величины без участия человека. Объект управления (регулирования) — агрегат (аппарат), в котором протекает подлежащий управлению процесс. Регулируемая величина – величина, которая регулируется или контролируется в САР. Автоматический регулятор – устройство, или группа устройств, осуществляющих регулирование.
Принципиальная и функциональная схемы САР
Объект регулир.: пропарочная камера (О) Регулируемая величина: Измер. преобразов. (датчик): термопара (ИЭ) Элемент сравнения: потенциометр (ЭС) Исполнительный механизм: двигатель (ИМ) Регулирующий орган: заслонка (РО) (ОВ – обмотка возбуждения, (УЭ) – усилительный элемент)
Функциональная схема – позволяет судить о работе всей системы в целом. На таких схемах каждый элемент заменяется прямоугольником и ему дается название в зависимости от выполняемых функций.
Структурная схема – аналогична функциональной и отличается показанными значениями входной и выходной величины и значениями передаточного коэффициента.
Особенности: 1) замкнута; 2) Каждый элемент имеет входную и выходную величину; 3) однонаправленность действия сигнала. Связи: – это каналы, по которым сигналы передаются от одного элемента к другим. 1) Прямые и обратные; 2) Местные и главные; 3) Положительные и отрицательные; 4) Гибкие и жесткие.
Жесткая связь – работает непрерывно (термопара), Гибкая связь – в переходных процессах Основные виды САР. Стабилизация программного регулирования, следящие системы и экстримальные. Классификация САР по характеру воздействия регулятора на объект регулирования: непрерывного регулирования, импульсные и релейные системы Основные виды САР: 1)
2)
3)
4) 5) Система импульсного регулирования: Следящие системы: управляющее воздействие также является величиной переменной (программное регулирование), но математическое описание его во времени невозможно, т. к. источник сигнала – внешнее явление, закон изменения которого заранее неизвестен. (Радиолокационная станция автоматического сопровождения самолёта). Исполнительные механизмы автоматики, назначение, основные типы. Асинхронный двухфазовый двигатель переменного тока. Устройство, принцип действия, способ реверсирования, основные характеристики, достоинства и недостатки Исполнительные механизмы предназначены для воздействия на регулирующий орган объекта автоматизации. Бывают электрическими, пневматическими, гидравлическими. Асинхронный двухфазный реверсивный двигатель состоит из статора, на котором расположены две сдвинутые под углом 90о обмотки, и ротора из полого цилиндра (для уменьшения момента инерции).
Пусть
Вектор Ф (результирующий магн. поток) с течением времени вращается с частотой сети. Его взаимодействие с магнитным полем ротора, созданного вихревыми токами, создает момент Механическая характеристика двигателя:
При подключении двигателя непосредственно в сеть последовательно с одной из обмоток включают фазосдвигающий конденсатор. Достоинства: отсутствие коллектора и щеток повышает надежность и позволяет использовать в запыленных и агрессивных средах; легко реверсируются. Недостатки: малый момент (необходимость в редукторе), присутствуют вихревые токи. Типовые переходные процессы К качеству регулирования объекта предъявляют конкретные требования. В одних случаях оптимальным может служить процесс, обеспечивающий минимальное значение динамической ошибки, в других случаях – минимальное значение времени регулирования. Поэтому, в соответствии с требованиями технологии, в качестве оптимального выбирают один из следующих типовых переходных процессов: 1) Граничный апериодический с минимальным временем регулирования в наиб. динамической ошибкой:
2) Процесс с 20% перерегулированием: Используется в качестве оптимального, когда допустима большая степень воздействия регулятора на объект и возможно некоторое перерегулирование.
Возникает при большой величине регулирующего воздействия. Используется в качестве оптимального, если на величину динамической ошибки регулирования накладываются жесткие отклонения.
Выбор настроек регуляторов
t перех. – время, в течении кот. выходная велич. достигает установивш. значения Yдин. – динамическая ошибка регулирования (макс. значение) Перерег. величина: Интегральная квадратичная ошибка регулирования – квадрат площади между криво переходного процесса и новым установившемся состоянием:
Чем меньше Чаще всего используются ПИ и ПИД регуляторы:
Содержание понятий: автоматика, автоматизация, САУ, САР Автоматика – наука, изучающая принципы и методы построения систем, выполняющих определенные функции без непосредственного участия человека. Автоматизация производства – это процесс в развитии производства, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам. САУ – Система автоматического управления включает в себя объект управления и устройство управления. САР – Система автоматического регулирования включает в себя объект регулирования и устройство регулирования (автоматический регулятор). САР предусматривает поддержание постоянной или изменяющейся по определенному закону величины без участия человека. Объект управления (регулирования) — агрегат (аппарат), в котором протекает подлежащий управлению процесс. Регулируемая величина – величина, которая регулируется или контролируется в САР. Автоматический регулятор – устройство, или группа устройств, осуществляющих регулирование.
Принципиальная и функциональная схемы САР
Объект регулир.: пропарочная камера (О) Регулируемая величина: Измер. преобразов. (датчик): термопара (ИЭ) Элемент сравнения: потенциометр (ЭС) Исполнительный механизм: двигатель (ИМ) Регулирующий орган: заслонка (РО) (ОВ – обмотка возбуждения, (УЭ) – усилительный элемент)
Функциональная схема – позволяет судить о работе всей системы в целом. На таких схемах каждый элемент заменяется прямоугольником и ему дается название в зависимости от выполняемых функций.
Структурная схема – аналогична функциональной и отличается показанными значениями входной и выходной величины и значениями передаточного коэффициента.
Особенности: 1) замкнута; 2) Каждый элемент имеет входную и выходную величину; 3) однонаправленность действия сигнала. Связи: – это каналы, по которым сигналы передаются от одного элемента к другим. 1) Прямые и обратные; 2) Местные и главные; 3) Положительные и отрицательные; 4) Гибкие и жесткие.
Жесткая связь – работает непрерывно (термопара), Гибкая связь – в переходных процессах Основные виды САР. Стабилизация программного регулирования, следящие системы и экстримальные. Классификация САР по характеру воздействия регулятора на объект регулирования: непрерывного регулирования, импульсные и релейные системы Основные виды САР: 1)
2)
3)
4) 5) Система импульсного регулирования: Следящие системы: управляющее воздействие также является величиной переменной (программное регулирование), но математическое описание его во времени невозможно, т. к. источник сигнала – внешнее явление, закон изменения которого заранее неизвестен. (Радиолокационная станция автоматического сопровождения самолёта).   ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 Принципиальная схема – позволяет судить о работе каждого элемента схемы. Например, САР температуры пропарочной камеры:
Принципиальная схема – позволяет судить о работе каждого элемента схемы. Например, САР температуры пропарочной камеры:


 Положительная обратная связь – увеличивает действие входного сигнала, отрицательная – уменьшает.
Положительная обратная связь – увеличивает действие входного сигнала, отрицательная – уменьшает. Система автоматической стабилизации: регулируемая величина остается неизменной. Поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующих возмущений.
Система автоматической стабилизации: регулируемая величина остается неизменной. Поддержание на постоянном уровне с допустимой ошибкой регулируемой величины независимо от действующих возмущений. (Регулирование скорости, напряжения, температуры, давления, напр. стабилизатор курса самолета)
(Регулирование скорости, напряжения, температуры, давления, напр. стабилизатор курса самолета) Система программного регулирования: по определенной программе. Управляющее воздействие изменяется по заранее установленному закону в функции времени или координат системы. Точность управления характеризуется величиной ошибки. (Управление копировально – фрезерным станком).
Система программного регулирования: по определенной программе. Управляющее воздействие изменяется по заранее установленному закону в функции времени или координат системы. Точность управления характеризуется величиной ошибки. (Управление копировально – фрезерным станком). Система экстремального регулирования: способны поддерживать экстремальное значение некоторого критерия (например, минимальное или максимальное), характеризующего качество функционирования объекта.
Система экстремального регулирования: способны поддерживать экстремальное значение некоторого критерия (например, минимальное или максимальное), характеризующего качество функционирования объекта. Система позиционного регулирования (релейного действия): позиционность определяется положением регулирующего органа (заслонка) в процессе регулирования. Если два положения (открыто/закрыто) – двухпозиционная, если есть промежуточные положения – трехпозиционная.
Система позиционного регулирования (релейного действия): позиционность определяется положением регулирующего органа (заслонка) в процессе регулирования. Если два положения (открыто/закрыто) – двухпозиционная, если есть промежуточные положения – трехпозиционная. WВ – обмотка возбужд.; WУ – обмотка управлен.
WВ – обмотка возбужд.; WУ – обмотка управлен.

 Протекающие под действием приложенных напряжений токи создают магнитные потоки, которые сдвинуты относительно соотв. напряжений на 90о.
Протекающие под действием приложенных напряжений токи создают магнитные потоки, которые сдвинуты относительно соотв. напряжений на 90о.





 θо=90о; Uв=const; Мдв=Uy
θо=90о; Uв=const; Мдв=Uy

 Для реверса необходимо для одной из обмоток изменить направление тока.
Для реверса необходимо для одной из обмоток изменить направление тока.

 Используется в качестве оптимального при сильном влиянии регулирующего воздействия в объекте на др. технологические величины, что ограничивает степень воздействия регулятора на объект и => приводит к большому отклонению регулирующей величины от заданного значения.
Используется в качестве оптимального при сильном влиянии регулирующего воздействия в объекте на др. технологические величины, что ограничивает степень воздействия регулятора на объект и => приводит к большому отклонению регулирующей величины от заданного значения. 3) Процесс с миним. квадратич. ошибкой:
3) Процесс с миним. квадратич. ошибкой: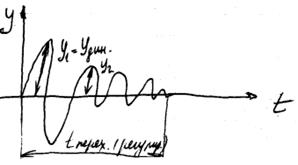 Осуществляется исходя из свойств объекта и типовых переходных характеристик – это изменение во времени выходной величины при ступенчатом изменении входной.
Осуществляется исходя из свойств объекта и типовых переходных характеристик – это изменение во времени выходной величины при ступенчатом изменении входной. (измен. заданное значение) (измен. внешние условия)
(измен. заданное значение) (измен. внешние условия)
 , при
, при  :
: 
 , тем выше качество процесса
, тем выше качество процесса













