|
|
ОБЩИЕ ПРИНЦИПЫ КОНСТРУКТИВНОГО ИСПОЛНЕНИЯ РЕЛЕСтр 1 из 7Следующая ⇒ ЭЛЕКТРОМЕХАНИЧЕСКИЕ РЕЛЕ
Отечественная промышленность изготовляет электромеханические реле в основном на электромагнитном и индукционном принципах. Устройство и принцип действия электромагнитных реле. Принцип действия электромагнитных реле основан на притяжении стальной подвижной системы к электромагниту при прохождении тока по его обмотке [15,22]. На рис.2.2 представлены три основные разновидности конструкций электромагнитных реле, содержащих: электромагнит 1, состоящий из стального магнитопровода и обмотки; стальную подвижную систему (якоря) 2, несущую подвижный контакт 3; неподвижные контакты 4; противодействующую пружину 5. Проходящий по обмотке электромагнита ток Iр создает магнитодвижущую силу (МДС) wPIP, под действием которой возникает магнитный поток Ф1, замыкающийся через магнитопровод электромагнита 1, воздушный зазор δ и подвижную систему 2. Якорь намагничивается, появляется электромагнитная сила FЭ, притягивающая якорь к полюсу электромагнита. Если сила FЭ преодолевает сопротивление пружины, то якорь приходит в движение и своим подвижным контактом 3 замыкает неподвижные контакты реле 4. При прекращении или уменьшении тока Iр до значения, при котором сила FЭ становится меньше силы FП сопротивления пружины 5, якорь возвращается в начальное положение, размыкая контакты 4.
Начальное и конечное положения якоря ограничиваются упорами 6.
Магнитный поток Ф и создающий его ток IP связаны соотношением
где RM – магнитное сопротивление пути1, по которому замыкается магнитный поток Ф; wP – количество витков обмотки реле. Магнитное сопротивление магнитопровода электромагнита RM состоит из сопротивления его стальной части RC и воздушного зазора δ RВ.З:
Подставив (2.2) в (2.1), получим
У реле с поворотным якорем и с поперечным движением якоря (рис.2.2, б, в) электромагнитная сила FЭ образует вращающий момент
где d - плечо силы FЭ. Из (2.3) и (2.4) следует, что сила притяжения FЭ и ее момент Мэ пропорциональны квадрату тока I2Р в обмотке реле и имеют, следовательно, постоянное направление, не зависящее от направления (знака) этого тока. Поэтому электромагнитный принцип пригоден для выполнения реле как постоянного, так и переменного тока и широко используется для изготовления измерительных реле тока, напряжения и вспомогательных реле логической части: промежуточных, сигнальных и реле времени.
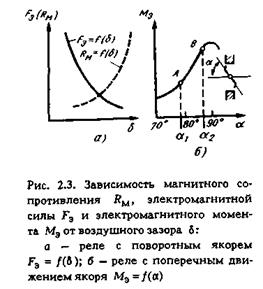
1 Магнитное сопротивление RM участков магнитной цепи Rc и RB.З пропорционально его длине l и обратно пропорционально сечению участка S и абсолютной магнитной проницаемости При перемещении якоря электромагнитного реле в сторону срабатывания уменьшаются воздушный зазор δ (рис.2.2) и соответственно RM. При постоянстве тока в реле уменьшение RM вызывает увеличение магнитного потока Ф (2.3), что обусловливает возрастание Fэ и Мэ (2.4). У реле с поперечным движением якоря и с втягивающимся якорем поле в воздушном зазоре нельзя считать однородным. Для этих конструкций зависимости RM = ¦(δ), Fэ = ¦(δ) и Мэ = = ¦ (α) имеют сложный характер (рис.2.2, а, б). Силу Fэ и момент Мэ можно выразить через производную магнитной проводимости воздушного зазора [10] уравнением
где GB.З - магнитная проводимость воздушного зазора, равная 1/RВ.З. Сила (момент), противодействующая движению подвижной системы реле, создается пружиной (F п и М п), трением и тяжестью подвижной системы (FT и МТ). При движении якоря на замыкание контактов F п и М п увеличиваются с уменьшением δ по линейному закону: М п = ka. (рис.2.3, а); сила трения FT остается неизменной. Токи срабатывания и возврата реле, коэффициент возврата. Ток срабатывания. Реле начинает действовать, когда
или Мэ = Мэ.с.р = М п + Мт. (2.6) Наименьший ток, при котором реле срабатывает, называется током срабатывания Iср.
В реле, выполняющих функции ИО, предусматривается возможность регулирования Iср изменением числа витков обмотки реле (ступенями) и момента, противодействующей пружины МП (плавно). Ток возврата. Возврат притянутого якоря в исходное положение происходит при уменьшении тока в обмотке реле под действием пружины 5 (см. рис.2.2), когда момент МП преодолевает электромагнитный момент МЭ.ВОЗ и момент трения МТ. Как следует из рис.2.4, это произойдет при соблюдении условия
где МЭ'2 - момент, при котором начинается возврат реле. Током возврата реле IВОЗ называется наибольшее значение тока в реле, при котором якорь реле возвращается в исходное положение. Коэффициент возврата. Отношение токов IВОЗ /Iср называется коэффициентом возврата кB:
У реле, реагирующих на возрастание тока, Iс.р > IВОЗ и kB < 1. Из диаграммы (рис.2.4) следует, что чем больше избыточный момент Δ M и момент трения МT, тем больше разница между IВОЗ и Iс.р и тем меньше kB. Особенности работы реле на переменном токе. При протекании по обмотке реле переменного тока
где k = 1/2k’. Это выражение показывает, что электромагнитная сила (а следовательно, и МЭt) электромагнитного реле переменного тока содержит две составляющие: постоянную kI2m и переменную kI2mcos2wt, изменяющуюся с двойной частотой (¦ = 100 Гц) тока (рис.2.5). Электромагнитная сила FЭt (MЭt) имеет пульсирующий характер. В то же время противодействующая сила пружины FП имеет неизменное значение. В результате этого, при сработанном состоянии реле, якорь реле будет находиться под действием разности двух сил FЭt – FП, меняющей свой знак. В интервалы времени ab, cd, ef в течение каждого периода Т, когда FП> FЭ (рис.2.5), якорь реле стремится отпасть и разомкнуть контакты реле, а в интервале bс, de, когда FЭ > FП, якорь вновь притягивается к электромагниту, стремясь замкнуть контакты. Вибрация якоря вызывает вибрацию контактов, оказывая вредное влияние на работу реле.
Короткозамкнутый виток К охватывает часть сечения магнитопровода. Под влиянием магнитного потока Ф I в витке К возникает ток I к, создающий поток Ф к. На рис.2.6 показаны положительные направления магнитных потоков, а их векторная диаграмма приведена на рис.2.7. В магнитопроводе реле циркулируют два результирующих магнитных потока: Ф I – выходящий из-под сечения магнитопровода, охваченного витком К; Ф II — выходящий из-под сечения S2, не охваченного витком:
Векторная диаграмма (рис.2.7) показывает, что магнитный поток Ф I сдвинут относительно Ф II на угол ψ.
Контакты реле должны обеспечивать многократное надежное замыкание и размыкание тока в управляемых ими цепях. Во время коммутационных операций происходит износ контактов, понижающий надежность их действия. Наиболее тяжелой операцией является размыкание цепи постоянного тока с индуктивным сопротивлением (например, цепи, питающей обмотку реле или электромагнита отключения выключателя). Известно, что в момент размыкания такой цепи в обмотке, обладающей индуктивностью L, возникает противодействующая ЭДС самоиндукции Отключающая способность контактов зависит от значений тока, напряжения и индуктивности размыкаемой цепи. Она условно характеризуется мощностью SK, представляющей собой произведение номинального напряжения источника оперативного тока UО.Т и наибольшего допустимого тока IК.Д, размыкание которого не вызывает повреждение контактов: SK = UО.Т IKД. Следует отметить, что для цепей переменного тока допустимый ток IKД. всегда больше, чем для цепи постоянного тока. Это объясняется тем, что при прохождении переменного тока через нулевое значение электрическая дуга гаснет, а возможность ее повторного зажигания уменьшается благодаря увеличению зазора между размыкающимися контактами и снижению значения EL. Для облегчения работы контактов можно применять шунтирование обмотки аппарата, находящегося в управляемой цепи, искрогасительным контуром RC или цепью из R и диода VD (рис.2.9). В этом случае большая часть тока, вызываемого ЭДС EL, замыкается по шунтирующему контуру, в котором и погашается (расходуется) основная часть энергии, накопленной в магнитном поле обмотки. В результате этого энергия, поддерживающая ток и электрическую дугу между контактами реле, уменьшается, что существенно облегчает работу контактов. Наличие искрогасительного контура замедляет возврат реле. Этого недостатка лишена схема на рис.2.9, б. Здесь диодом VD шунтируется контакт реле KL, размыкающий индуктивную цепь. При такой схеме ток i, обусловленный EL, почти полностью замыкается, помимо размыкающихся контактов К, через контур и сопротивление источника UО.Т. В нормальных условиях, когда контакты реле разомкнуты, контур, шунтирующий контакты, разомкнут диодом VD. Электрическая дуга между подвижным и неподвижным контактами возникает и при замыкании управляемой цепи. При замыкании подвижный контакт ударяется о неподвижный, что порождает вибрацию контактов, сопровождаемую многократным замыканием и размыканием управляемой цепи. При этом в момент разрыва появляется дуга, которая может вызвать оплавление и приваривание контактов при сильном их нагреве. Вибрация прекратится, когда кинетическая энергия подвижной системы реле израсходуется на преодоление сопротивления подвижных контактов и нагрев элементов замыкаемой цепи. Для предупреждения порчи контактов электрической дугой неподвижные контакты выполняются в виде упругих пластин, колеблющихся вместе с подвижными контактами без разрыва управляемой цепи. Применяются также демпферы (механические успокоители), поглощающие кинетическую энергию подвижной системы. Контакты выполняются из тугоплавкого и менее подверженного окислению материала. Применяется серебро, металлокерамика и др.
УКАЗАТЕЛЬНЫЕ РЕЛЕ
Ввиду кратковременности прохождения тока в обмотке указательных реле они выполняются так, что сигнальный флажок и контакты реле остаются в сработанном состоянии до тех пор, пока их не возвратит на место обслуживающий персонал. Указанные реле изготовляются для последовательного (рис.2.21, а) и параллельного (рис.2.21, б) включения.
При появлении тока в обмотке 3 (рис.2.20) якорь реле 5 притягивается и освобождает флажок 9. Последний падает под действием собственной массы, принимая вертикальное положение. В этом положении флажок виден через прозрачный кожух 2. Возврат флажка в начальное положение производится кнопкой 10. Выпускаются также сигнальные реле типа ЭС, выполняющие те же функции. РЕЛЕ ВРЕМЕНИ
Назначение и основные требования. Реле времени служит для искусственного замедления действия устройств РЗ и электроавтоматики. На схеме рис.2.22 показано применение реле времени в РЗ. При замыкании контактов токового реле КА.1 плюс источника оперативного тока подводится к обмотке реле времени КТ, которое через определенный интервал времени замыкает контакты КТ.1 в цепи катушки отключения YAT, производя отключение выключателя. Время, проходящее с момента подачи напряжения на обмотку реле времени до замыкания его контактов, называется выдержкой времени реле. Основным требованием, предъявляемым к реле времени, применяемым в схемах РЗ, является точность. Погрешность во времени действия реле со шкалой до 3,5 с не должна превышать ± 0,06 с, а при больших выдержках времени, устанавливаемых на реле со шкалой 20-30 с, ± 0,25 с. Реле времени на постоянном токе должно надежно срабатывать начиная с 80% номинального напряжения, а на переменном – с 85%. Выдержка времени не должна зависеть от возможных в эксплуатации колебаний оперативного напряжения. Потребление обмотки электромагнитных реле времени составляет 20-30 Вт. Конструкция реле времени с часовым механизмом. Принцип устройства реле времени может быть пояснен на примере конструкции, изображенной на рис.2.23. При появлении тока в обмотке 1 якорь 2 мгновенно втягивается, освобождая рычаг 4 с зубчатым сегментом 5. Под действием ведущей пружины 6 рычаг 4 приходит в движение, которое, однако, не является свободным, так как оно замедляется специальным устройством выдержки времени 7. Через некоторое время tP, зависящее от расстояния l (или угла α) и скорости движения wP рычага 4, последний переместится на угол α и замкнет контакты реле 8. Таким образом, реле сработает с выдержкой времени tP = α/ wP. Устройство выдержки времени осуществляется с помощью часового механизма, основным элементом которого является анкерное устройство. При исчезновении тока в реле якорь и рычаг 4 должны мгновенно возвратиться в начальное положение под действием возвратной пружины 3. Это обеспечивается с помощью храпового механизма или фрикционного устройства, обладающих свободным расцеплением при обратном ходе сегмента 5. Регулирование выдержки времени осуществляется изменением угла α путем перемещения контактов реле 8. В некоторых конструкциях предусматривается мгновенный контакт 9, позволяющий замыкать цепь с малой, нерегулируемой выдержкой времени (0,15-0,2 с). Катушка реле времени не рассчитывается на длительное прохождение тока. Поэтому реле,
предназначаемые для длительного включения под напряжение, выполняются с добавочным сопротивлением RД, включаемым последовательно с обмоткой реле, как показано на рис.2.24. Нормально сопротивление RД зашунтировано размыкающимся мгновенным контактом реле КТ.1. После срабатывания реле этот контакт размыкается, и сопротивление вводится в цепь обмотки реле, ограничивая проходящий в ней ток до значения, допустимого по условиям нагрева и достаточного для удержания реле в сработанном состоянии. Отечественные заводы выпускают реле времени постоянного тока типов РВ-110, РВ-120, РВ-130, РВ-140 и переменного тока РВ-210, РВ-220, РВ-230. На базе электронных схем ЧЭАЗ выпускает реле времени типов РВ-01 и РВ-03 (см. ниже). ИНДУКЦИОННЫЕ РЕЛЕ Принципы действия и выполнения индукционных систем. Работа индукционных реле основана на взаимодействии переменных магнитных потоков с токами, индуктированными ими в подвижной системе реле. Основными элементами реле являются два электромагнита 1 и 2 и подвижная система 3, расположенная в магнитном поле электромагнитов (рис.2.26). Подвижная система выполняется из немагнитного электропроводящего материала в виде медного или алюминиевого диска, либо полого цилиндра (барабанчика), закрепленного на вращающейся оси 4. С осью 4 жестко связан подвижный контакт реле 5, замыкающий при повороте неподвижные контакты 6. Движению диска в сторону замыкания контактов противодействует спиральная пружина 7. Обмотки электромагнитов 1 и 2 питаются переменными (синусоидальными) токами I 1 и I 2, которые создают переменные магнитные потоки Ф 1 и Ф 2. Положительное направление токов и соответствующее им положительное направление потоков, определяемое по правилу буравчика, показаны на рис.2.26. Векторная диаграмма их изображена на рис.2.27. Пренебрегая потерями на намагничивание, потоки Ф 1 и Ф 2 показаны на диаграмме совпадающими с токами I 1 и I 2. Магнитный поток Ф1, пронизывая подвижную систему 3, наводит в диске ЭДС В рассматриваемой конструкции возникают две силы: FЭl = k1Ф1IД2 – обусловленная взаимодействием магнитного потока Ф1 и тока IД2, наведенного другим потоком Ф2, и FЭ2 = k2Ф2IД1 вызванная воздействием потока Ф2 на ток IД1, наведенный потоком Ф1. Силы взаимодействия потока Ф 1 со «своим» током I Д1 и Ф 2 с вихревым током I Д2 равны нулю.
Направление сил FЭl и FЭ2 и создаваемые ими моменты вращения МЭ1 и МЭ2 определяются их средними значениями за период, которые зависят от угла сдвига фаз между взаимодействующими потоками и токами в диске. Силы FЭl и FЭ2 определяются по правилу «левой руки» и показаны на рис.2.26. Результирующая электромагнитная сила FЭ = FЭl + FЭ2. Результирующий электромагнитный момент МЭ = FЭd, где d — плечо силы FЭ относительно оси вращения. Момент МЭ приводит в движение подвижную систему 3, которая в зависимости от знака (направления) МЭ действует в сторону замыкания или размыкания контактов реле 5. Электромагнитная сила FЭ и ее момент МЭ. Значение результирующей электромагнитной силы FЭ выражается через магнитные потоки Ф1 и Ф2, создаваемые токами, питающими обмотки электромагнитов реле, угол сдвига фаз между ними ψ и частоту входных токов ¦:
Соответственно электромагнитный момент
где Ф1 и Ф2 – действующие значения магнитных потоков; k, k', k" – постоянные величины. Анализируя выражение (2.13), можно сделать следующие выводы: 1) результирующий момент пропорционален действующим (или амплитудным) значениям магнитных потоков и зависит от сдвига фаз ψ между токами, подведенными к реле. Это означает, что индукционные реле могут служить для сравнения фаз входных токов. Реле имеет максимальный момент при ψ = 90° и не действует при ψ = 0; 2) знак момента зависит от sin ψ. Результирующая сила FЭ направлена от оси опережающего к оси отстающего магнитного потока; 3) конструкция реле должна обеспечить создание не менее двух переменных магнитных потоков (Ф1 и Ф2), пронизывающих подвижную систему в разных точках и сдвинутых по фазе на угол ψ ¹ 0; 4) поскольку действующие значения магнитных потоков Ф1 и Ф2 являются постоянными величинами, то мгновенное значение моментов индукционных реле в отличие от электромагнитных не изменяется во времени. Поэтому у индукционных реле отсутствует вибрация контактов, если токи и напряжения, создающие соответствующие потоки, синусоидальны; 5) на индукционном принципе могут выполняться только реле переменного тока: реле тока, направления мощности, сопротивления и др.
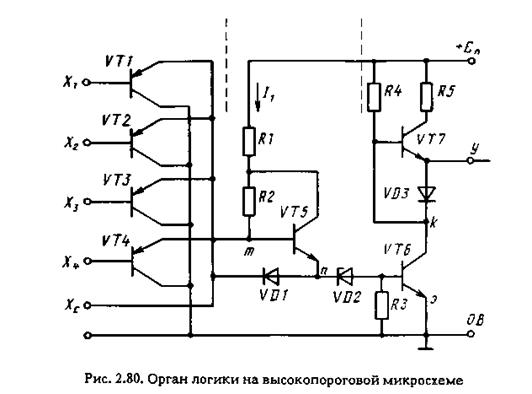
ОРГАНЫ ЛОГИКИ НА ИМС Для выполнения ЛЭ используются цифровые ИМС, предназначенные для преобразования входных двоичных сигналов высокого и низкого уровней (1 и 0) в дискретные выходные сигналы. По выполняемым функциям цифровые микросхемы можно подразделить на схемы, выполняющие логические операции И-НЕ либо ИЛИ-НЕ, И, НЕ, ИЛИ (логические схемы), и на схемы функциональных узлов (триггеры, счетчики, дешифраторы и др.). Эта группа ИМС выполняется в виде различных сочетаний типовых логических схем. На чертежах микросхемы изображаются и обозначаются так же, как и соответствующие им логические элементы (см. рис.2.72). Как правило, одна микросхема обычно состоит из нескольких однотипных логических схем. При этом каждая схема имеет выведенные из корпуса входы и выходы и два общих для всех схем вывода для подсоединения источника питания (рис.2.78, а). При таком исполнении каждая из Свойства логических микросхем характеризуются параметрами, которые приводятся для разных типовых микросхем в справочниках по ИМС. Для устройства РЗ наиболее важными являются следующие параметры: помехоустойчивость, определяемая значением наибольшего допустимого напряжения UПОМ mах, поступающего на вход микросхемы, при котором не происходит ее переключения из исходного состояния в состояние срабатывания и наоборот; мощность, потребляемая от источника питания при действии и недействии микросхемы; нагрузочная способность микросхемы, характеризуемая числом микросхем, аналогичных рассматриваемой, которые можно подключить к ее выходу; коэффициент объединения по входу, определяющий наибольшее число входных сигналов, которые можно допустить для данной микросхемы. Промышленность выпускает цифровые ИМС в виде серий, содержащих по несколько различных по функциям микросхем (до 10 и более). Серии различаются по составу входящих в них микросхем и по их параметрам. Схемы одной серии имеют одинаковое конструктивно-технологическое исполнение и могут соединяться последовательно друг с другом (выход с входом) без согласующих элементов. Каждая серия имеет базовую логическую схему, на основе которой выполняются все микросхемы, входящие в серию. В логических и функциональных устройствах РЗ, выпускаемых и подготовляемых к выпуску заводом ЧЭАЗ, используются микросхемы в основном серий К511 и К155 на биполярных транзисторах, а также К176 на КМОП. Логические микросхемы первых двух серий выполняются на базовой схеме И-НЕ. Серия МС К176 использует схемы, выполняющие операции И либо ИЛИ. Все разновидности этих схем имеют общую структуру, приведенную на рис.2.76, в, г. Они состоят из двух основных элементов (схем): одного – выполняющего операцию И, второго – выполняющего операцию НЕ. Последняя всегда реализуется по схеме транзисторного инвертора, выполняющего одновременно функцию усиления выходного сигнала и формирования уровня выходного сигнала. Операция И обычно выполняется на резисторах, диодах или транзисторах. Исходя из элементов, на базе которых выполняются логические элементы И или НЕ, логические схемы подразделяются на резисторно-транзисторные ИМС, диодно-транзисторные логические устройства (ДТЛ) и транзисторно-транзисторные (ТТЛ). Диодно-транзисторный ЛЭ И-НЕ. На рис.2.79 показан ЛЭ на микросхеме ДТЛ. Схема состоит из элементов И, НЕ и смещения. Элемент И состоит из трех диодов VD1, VD2, VD3 (по числу входных сигналов) и резистора R1, через который на выход схемы И (в точке m) подается опорное напряжение положительного знака + ЕП от источника питания. Элемент НЕ выполнен в виде однокаскадного инвертора на транзисторе VT1, на базу которого подается сигнал (напряжение UY) с выхода схемы И. Он преобразуется транзистором VT1 в выходной сигнал UВЫХ (точка Y) с инвертированием его уровня. В цепь базы VT1 включены два диода, называемые диодами смещения VD1CM и VD2CM. Эти диоды увеличивают пороговое напряжение, необходимое для открытия транзистора VT1 и срабатывания ЛЭ микросхемы, повышая этим отстройку элемента микросхемы от помех:
где Um и Uэ.бVT1 – напряжения открытия диода и эмиттерного перехода VT1 соответственно. Напряжение, необходимое для открытия кремниевых диодов, UOT.Д = 0,5 ÷ 0,6 В, а для открытия транзистора Uот.VT1 = 0,4 ÷ 0,5 В. Следовательно, Um = 1,4 ÷ 1,7 В, а при отсутствии диодов U'm = 0,5 ÷ 0,6 В. Допустим, что на всех входах одновременно появились единичные сигналы в виде напряжения высокого уровня Е1ВХ ≈ ЕП. Тогда на выходе элемента И (в точке m) возникает напряжение U1m > 0. Параметры схемы (R1, R3, ЕП) подбираются так, чтобы это напряжение превосходило напряжение (1,2–1,4 В), необходимое для открытия диодов смещения и появления на базе VT1 потенциала Uб = I1R3, достаточного для открытия транзистора инвертора для перехода его в режим полного насыщения. При этом на выходе схемы И-НЕ в точке Y установится малое напряжение нулевого уровня U0ВЫХ = 0,2 ÷ 0,4 В. Таким образом, при появлении единичных сигналов на всех входах рассматриваемой схемы на ее выходе появляется сигнал нулевого уровня. Это означает, что микросхема выполняет логическую операцию И-НЕ. Для возврата схемы в исходное состояние необходимо подать хотя бы на один из диодов (например, на вход 3) сигнал на уровне логического 0, т. е. напряжение U0ВХ3, близкое к нулю. Диод VD3 открывается, и потенциал выхода И (точка т) скачком изменяется от единичного значения до нулевого (от U1m до U0m). При этом диоды смещения закрываются, ток и напряжение базы VT1 падают до нуля – транзистор закрывается. При закрытом транзисторе потенциал на выходе органа И-НЕ (в точке Y) увеличивается скачком до высокого уровня. Как видно из рис.2.79, при отсутствии нагрузки Органы логики И-НЕ на транзисторно-транзисторных ИМС. В микросхемах ТТЛ элемент И, входящий в состав схемы И-НЕ, может выполняться либо на обычных транзисторах ИМС, либо на интегральных транзисторах особой конструкции – многоэмиттерных, которые имеют до восьми эмиттеров, общую базу и один коллектор. База состоит из активных областей (их число равно числу эмиттеров), образующих переходы база-эмиттер и пассивных участков, разделяющих эти переходы для исключения их воздействия друг на друга. Преимуществом многоэмиттерных транзисторов является уменьшение занимаемой ими площади и улучшение некоторых параметров ИМС. В схемах ТТЛ для построения элемента И в основном применяются многоэмиттерные транзисторы. Обычные транзисторы (с одним эмиттером) используются для выполнения операции И в схемах ТТЛ лишь для получения микросхем с повышенной помехоустойчивостью (с высоким порогом переключения). Микросхемы на обычных транзисторах получают питание от источников до 15-20 В вместо 5-6 В, являющихся предельными для многоэмиттерных транзисторов. Чем выше напряжение питания ЕП, тем большим может быть порог переключения, т.е. входное напряжение единичного уровня U1ВХ, при котором происходит переключение логического элемента. С увеличением ЕП повышается уровень допустимой помехи. Высокопороговые микросхемы получили широкое применение в РЗ.
Элемент НЕ выполнен с помощью транзисторного инвертора в виде двухкаскадного усилителя на VT6 и VT7. Инвертирование сигнала, получаемого с элемента И, осуществляется VT6, а дополнительное усиление мощности выходного сигнала VT7, который включается по схеме эмиттерного повторителя. Такое включение позволяет также уменьшить выходное сопротивление схемы И-НЕ. В состав инвертора входят R3-R5 и диод VD3. Кроме элементов И и НЕ в схеме предусмотрены транзистор VT5 и стабилитрон VD2, который устанавливается вместо диодов смещения для повышения порога срабатывания и помехоустойчивости. Для прохождения сигнала, открывающего VT6 и вызывающего срабатывание ЛЭ, входное напряжение должно стать больше обратного напряжения, открывающего VD2. У кремниевого стабилитрона это напряжение Uоб.ст = 6,8 ÷ 7 В, что и позволяет повысить уровень допустимых помех. Транзистор VT5 предназначен для усиления тока, поступающего на базу инвертора VT6, до значения, обеспечивающего его переход в режим полного насыщения, что необходимо для получения на выходе.схемы (на зажиме Y) напряжения UВЫХ на уровне логического нуля (0,5-0,6 В). Для открытия транзистора VT6 на выходе элемента И в точке т не должно появиться напряжение, равное или большее суммы напряжений, необходимых для открытия VT5, VD2 и VT6, т.е. Um = 0,5 + 7 + 0,5 = 8 В. Это напряжение является порогом чувствительности рассматриваемой микросхемы (UПОР = Um). Входное напряжение, необходимое для срабатывания ЛЭ, UВХ.СР должно быть больше порогового напряжения UПОР. Нормальное значение UВХ, соответствующее уровню логической 1, целесообразно принять равным 10-12 В с некоторым запасом по отношению к значению UВХ.СР, учитывая возможность его понижения при колебании напряжения питания. Если единичное напряжение на входе (в рассматриваемом случае на Х2) станет меньше своего нормального значения (12-13 В), то до тех пор, пока U'ВХ остается больше UПОР (8 В), VT2 остается закрытым. При уменьшении UBX ниже UПОР (8 В) элемент переключается, транзистор VT2 начинает открываться. По мере уменьшения U0BX (которое при U < 8 В соответствует нулевому уровню) входной ток I0BX возрастает и при U0BX ≈ 0 достигает максимума, VT2 переходит в режим насыщения, при котором I0BX.mах = 0,1 ÷ 0,15 мА. Действие микросхемы. Если на все входы микросхемы (рис.2.80) поданы единичные сигналы в виде напряжения положительного знака единичного уровня U'BX, близкие к ЕП, то эмиттерные переходы транзисторов элемента И VT1-VT4 типа р-n-р смещаются в обратном направлении, при этом все транзисторы схемы И будут заперты. В этом режиме на выходе схемы И в точке m устанавливается напряжение UIm положительного знака на уровне 1, поступающее на базу VT5 (рис.2.80). Сопротивления резисторов R1 и R2 подобраны так, чтобы значение U'm было больше суммы напряжений, необходимых для открытия транзистора VT5, стабилитрона VD2 и транзистора VT6 элемента НЕ.   Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 1 При питании обмотки реле переменным током Iр = Imsinwt под Ф подразумевается мгновенное значение потока Фt = Фmsinwt или его действующее значение.
1 При питании обмотки реле переменным током Iр = Imsinwt под Ф подразумевается мгновенное значение потока Фt = Фmsinwt или его действующее значение.
 (2.1)
(2.1) (2.2)
(2.2) ,
, (2.3)
(2.3) (2.4)
(2.4)

 (2.5)
(2.5)

 (2.7)
(2.7) (2.8)
(2.8) согласно (2.3) мгновенное значение
согласно (2.3) мгновенное значение  . Учитывая, что
. Учитывая, что , получаем
, получаем (2.9)
(2.9)

 (2.10)
(2.10)

 , стремящаяся поддержать протекавший до этого ток (рис.2.9). Под действием этой ЭДС в воздушном зазоре между размыкающимися контактами появляется электрическая дуга (искра), вызывающая обгорание, а при больших токах оплавление и эрозию (распыление металла) контактов.
, стремящаяся поддержать протекавший до этого ток (рис.2.9). Под действием этой ЭДС в воздушном зазоре между размыкающимися контактами появляется электрическая дуга (искра), вызывающая обгорание, а при больших токах оплавление и эрозию (распыление металла) контактов.



 , поток Ф 2 – ЭДС
, поток Ф 2 – ЭДС  .Наведенные ЭДС отстают по фазе на 90° от вызывающих их магнитных потоков. Под действием ЭДС Е Д1 и Е Д2 в подвижной системе возникают вихревые токи I Д1 и I Д2, замыкающиеся вокруг оси индуктирующего их магнитного потока. Положительные направления I Д1 и I Д2, определенные по правилу буравчика по положительному направлению потоков Ф 1 и Ф 2, показаны на рис.2.27. Вследствие малой индуктивности контура вихревых токов их векторы I Д1 и I Д2 принимаются совпадающими по фазе с вызвавшими их ЭДС (Е Д1 и Е Д2).
.Наведенные ЭДС отстают по фазе на 90° от вызывающих их магнитных потоков. Под действием ЭДС Е Д1 и Е Д2 в подвижной системе возникают вихревые токи I Д1 и I Д2, замыкающиеся вокруг оси индуктирующего их магнитного потока. Положительные направления I Д1 и I Д2, определенные по правилу буравчика по положительному направлению потоков Ф 1 и Ф 2, показаны на рис.2.27. Вследствие малой индуктивности контура вихревых токов их векторы I Д1 и I Д2 принимаются совпадающими по фазе с вызвавшими их ЭДС (Е Д1 и Е Д2).
 (2.12)
(2.12) (2.13)
(2.13)


 ,а при наличии нагрузки RH
,а при наличии нагрузки RH  . Таким образом, при наличии нулевого сигнала на одном, на нескольких или на всех входах ЛЭ И-НЕ переходит в состояние недействия. При негативной логике, когда в качестве сигнала, приводящего в действие логическую схему, принимается нулевой (а не единичный) уровень входного сигнала, рассмотренная схема будет выполнять операцию ИЛИ-НЕ. Достоинством логических схем ДТЛ является относительная простота.
. Таким образом, при наличии нулевого сигнала на одном, на нескольких или на всех входах ЛЭ И-НЕ переходит в состояние недействия. При негативной логике, когда в качестве сигнала, приводящего в действие логическую схему, принимается нулевой (а не единичный) уровень входного сигнала, рассмотренная схема будет выполнять операцию ИЛИ-НЕ. Достоинством логических схем ДТЛ является относительная простота.