
|
|
Частотный критерий (критерий Найквиста)Этот критерий позволяет определить устойчивость замкнутой САР, используя амплитудно-фазовую характеристику (АФХ) разомкнутой САР. Согласно критерию Найквиста замкнутая САР будет устойчивая, если годограф АФХ разомкнутой системы на комплексной плоскости не охватывает точку с координатами (-1, j 0). Порядок использования критерия Найквиста следующий. Сначала, путем формальной замены в выражении (4.3) оператора р на jω, получают выражение для АФХ разомкнутой САР в виде
КР(jω)= КП(jω)КОС(jω). (4.7)
Затем выражение (4.7) представляют в алгебраической форме, как КР(jω)= Rе{ КР(jω) }+ j· Jm{ КР(jω) } (4.8)
После этого на комплексной плоскости, при изменении частоты ω от 0 до ∞, строится годограф функции КР(jω). Чтобы представить АФХ в алгебраической форме, необходимо числитель и знаменатель КР(jω) домножить на комплексное, сопряженное со знаменателем, число. В знаменателе получим вещественную функцию от частоты ω, а в числителе - функцию от ω, содержащую вещественную и мнимую части. Для облегчения расчетов при построении годографа можно использовать приемы и правила, основанные на свойствах алгебраических преобразований, таких как: -модуль дробного комплексного числа равен отношению модуля числителя к модулю знаменателя; -модуль произведения равен произведению модулей; -аргумент дробного комплексного числа равен разности аргументов числителя и знаменателя; -аргумент произведения двух комплексных чисел равен сумме аргументов.
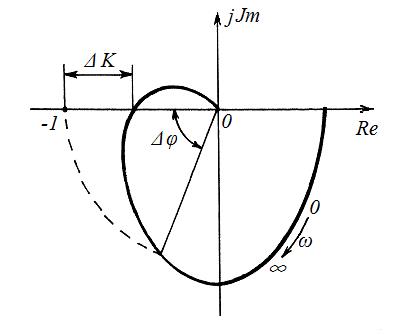
Определение запаса устойчивости системы Наибольшее распространение для определения запаса устойчивости получил способ, основанный на использовании критерия Найквиста. Определяются две величины – запас устойчивости по амплитуде и запас устойчивости по фазе. Запас устойчивости по амплитуде определяется как величина ΔК, на которую может возрасти модуль АЧХ разомкнутой системы, чтобы система оказалась на границе устойчивости. Запас устойчивости по фазе равен величине угла Δφ, на которую должно измениться запаздывание по фазе, чтобы система оказалась на границе устойчивости. Величины ΔК и Δφ показаны на рисунке 4.2. Для получения значения Δφ необходимо из центра координат провести дугу радиусом R = 1из точки (-1; j 0) до пересечения с линией годографа, как показано на рис.4.2.
Рисунок 4.2 - Годограф разомкнутой системы. Качество управления системы Оценка качества управления САУ производится по показателям качества, к которым относятся: - статическая ошибка; - величина перерегулирования; - время переходного процесса. Для определения этих показателей необходимо знать переходную характеристику h(t) САР. Ее находят по изображению Н(р), которую приизвестной передаточной функции замкнутой системы, представленной в виде выражения (4.4), получают путем умножения изображения единичной функции 1(р) на передаточную функцию К(р). Затем переходят от изображения переходной характеристики к ее оригиналу.
Н(р) = 1(р)· К(р). (4.9)
h(t) ← Н(р), (4.10)
где знак ← означает переход от изображения функции к ее оригиналу. При нахождении оригинала необходимо так преобразовать числитель и знаменатель Н(р), чтобы получить формулу, подобную на одно из табличных изображений функций времени приведенных в Приложении В, которые даны без учета постоянных коэффициентов. В процессе проведения математических преобразований полученного выражения Н(р), его знаменатель, представляющий собой степенной полином, следует привести к виду
p(p2+bp+c) = p(p – p1)(p – p2), (4.11) где p1 и p2 – корни квадратного трехчлена p2+bp+c. При этом корни могут быть действительными или комплексными вида p1,2 = α ± j β. Такому случаю соответствуют изображения временных функций, содержащие в знаменателе сумму вида [(p+ α)2+ β 2 ] , где α = b/2, β 2 = (b/2)2 - с. Затем строится график переходной характеристики, возможный вид которого приведен на рисунке 4.3. При этом, обычно, функции h(t) присваивают размерность регулируемого параметра y(t) путем умножения h(t) на заданное значение параметра у0 (без ±Δy).
Статическая ошибка может быть абсолютная и относительная. Абсолютная статическая ошибка Δy определяется как разность между установившимся значением регулируемого параметра yуст и его заданным значением y0.
Δy = yуст - y0. (4.12)
Относительная статическая ошибка δ y равна отношению абсолютной статической ошибки к заданному значению параметра y0.
Величина перерегулирования Этот показатель определяют как максимальную относительную динамическую ошибку из соотношения
δД МАКС
Время переходного процесса Данный показатель характеризует быстродействие САР, под которым понимают промежуток времени tП от начала приложения внешнего воздействия до установления значения выходной величины y(t) в пределах y0 ± ΔД, где ΔД – допустимая динамическая ошибка.   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 Определение статической ошибки
Определение статической ошибки (4.13)
(4.13)

 . (4.14)
. (4.14)