|
|
Тема 6. КАЧЕСТРО РЕГУЛИРОВАНИЯ В ЛИНЕЙНЫХ СИСТЕМАХ РАДИОАВТОМАТИКИСтр 1 из 3Следующая ⇒ РАДИОАВТОМАТИКА
Методические указания к индивидуальной работе для студентов 3 курса специальности "Радиотехника" дневного отделения
Новосибирск
Составил канд. техн. наук, доц. С. Е. Лявданский
Рецензент д-р техн. наук, проф. Т.Б. Борукаев
Работа подготовлена кафедрой радиоприемных и радиопередающих устройств
© Новосибирский государственный технический университет, 1995
Тема 6. КАЧЕСТРО РЕГУЛИРОВАНИЯ В ЛИНЕЙНЫХ СИСТЕМАХ РАДИОАВТОМАТИКИ
Общие понятия и определения
Качество регулирования - важнейшая характеристика автоматической системы. Вопрос о нем рассматривается проектировщиком системы сразу после проверки устойчивости, ибо, не обеспечив устойчивости, говорить о качестве не имеет смысла. Понятие качества регулирования автоматической системы довольно многопланово. В различных ситуациях проектировщика и эксплуатационника системы могут интересовать различные аспекты качества регулирования. Выделим три из них. 1. Качество регулирования в установившемся и вынужденном 2. Качество регулирования в переходном режиме. 3. Качество регулирования при воздействии на систему В данной теме рассматривается лишь первый аспект проблемы -качество регулирования при воздействии на систему детерминированного сигнала, который может быть представлен аналитической Функцией, абсолютно дифференцируемой на любом отрезке. Например:
x(t)= At³+Bt²-ct; x(t)= B Cos Wt
x(t)= Ae α1t +Be –α2t
и т. п.
Под качеством регулирования в этом случае подразумевают величину ошибки регулирования, причем, чем она меньше, тем выше качество. Ошибкой считается отклонение реального состояния регулируемого параметра объекта регулирования от заданного. Например, пусть мы имеем электронно управляемый ВЧ генератор, частота которого должна изменяться по закону внешнего управляющего сигнала f1 (t). Реальное значение частоты генератора, как правило, не будет точно копировать закон f1 (t), оно будет описываться другой функцией f2 (t). В этом случае ошибкой регулирования будет считаться разница
ξ(t)=f1 (t)-f2 (t)
Замкнутые системы радиоавтоматики построены таким образом, что в их структурной схеме обязательно присутствует главный сумматор системы, являющийся по существу вычитателем. Именно на него возлагается функция выделения разницы между действительным и требуемым значениями регулируемого параметра объекта регулирования.
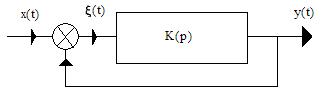
Рис. 6.1
На рис. 6.1 показана простейшая структура следящей системы, где К(р) - передаточная функция разомкнутой системы; здесь х(t) – управляющее воздействие; у(t) - результат регулирования.
Сигнал на выходе главного сумматора ξ (t) является сигналом ошибки.
Метод коэффициентов ошибки
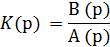
Идея метода очень проста: разложить передаточную функцию Kξx(р) в ряд по степеням комплексной переменной р, а затем, записав в операторной форме дифференциальное уравнение системы, обратным преобразованием Лапласа обеих его частей перейти к традиционной форме записи через производные. Рассмотрим эту идею более подробно. Передаточная функция может быть записана по формуле (6.9), но для удобства разложения в ряд ее необходимо представить в виде дробно-рациональной функции параметра р, т. е. в виде отношения двух полиномов. Интересной особенностью функции Кξх(р) является тот факт, что она представляет собой отношение двух характеристических полиномов: разомкнутой системы А(р) и замкнутой системы G(р). В самом деле, если обозначим передаточную функцию разомкнутой системы в виде
то знаменатель этой передаточной функции будет называться характеристическим полиномом разомкнутой системы. С другой стороны, передаточная функция замкнутой системы тоже имеет свой знаменатель:
Полином G (р) называется характеристическим полиномом замкнутой системы. Обратим внимание: это сумма числителя и знаменателя передаточной функции разомкнутой системы К(р). Теперь, переходя к формуле (6.9), можно записать:
что и является отношением двух характеристических полиномов. Отношение этих полиномов можно представить в виде некоего третьего полинома, так называемого полинома ошибки с пока что неизвестными коэффициентами:
В принципе, этот полином бесконечен, так как в общем случае невозможно ожидать, чтобы два различных полинома разделились без остатка. Коэффициенты полинома S0, S1, S2, … называются коэффициентами ошибки. Формулу (6.12) можно записать в более удобном виде. Так как передаточная функция есть отношение изображений двух сигналов, то
Записав это в одну строку, получим
ξ (р) = x(р)(S0 + S1p + S2p2 + S3p3 +...),
или, переходя от операторной (символической) формы записи дифференциального уравнения к классической, получаем:
Таким образом, если определить неизвестные пока коэффициенты ошибки S0, S1, S2, S3,..., то искомая ошибка регулирования записывается в аналитической форме через входной сигнал х(t) и его производные. Это настолько удобно, что не следует жалеть усилий для определения коэффициентов ошибок. Самый удобный способ определения коэффициентов ошибки – выразить их через известные коэффициенты характеристических полиномов А (р) и G (р). Запишем эти полиномы в виде:
A(p)=Cnpn + Cn-1pn-1 +... C1p + C0;
G(p)=Anpn + An-1pn-1 + A1p + A0 (6.14)
Эти записи показывают, что порядок характеристических полиномов замкнутой и разомкнутой систем одинаков. Это не случайно. Если вернуться к формуле (6.11), то видно, что в G (p) = A(p) + B(p). Ясно, что порядок полинома G (р) будет определяться порядком того полинома A(р) или В (р), который содержит переменную р в более высокой степени. Как известно, В(р) - числитель передаточной функции К (р), а А(р) h ее знаменатель. Для всех практически встречающихся автоматических систем порядок полинома A(р) выше, чем полинома В(р), так как наиболее часто встречающиеся структурные звенья: инерционные, интегрирующие, колебательные - имеют порядок р в знаменателе своих передаточных функций выше, чем в числителе. Поэтому можно считать, что порядок полинома G (р) определяется порядком полинома A(р). Возвращаясь к формуле (6.12) и подставляя туда (6.14), путем деления двух полиномов легко найти коэффициенты третьего. В частности,
и т. д. Здесь: А1, А2, А3,... - коэффициенты полинома G(р); С0, С1, C2 ... - коэффициенты полинома А(р). Полученные формулы для коэффициентов ошибки интересны не только тем, что позволяют их рассчитать, но и тем, что открывают ясный путь к пониманию сущности астатизма. Они позволяют понять, почему наличие именно интегрирующих звеньев превращает систему в астатическую и уменьшает ошибку регулирования. Рассмотрим несколько примеров. Пример 6. 3. Возьмем статическую систему
Для такой системы
C0 = 1; С1 = T1 + T2; С2 = T1T2; A0 = 1 + K; A1 = T1 + T2; A2 = T1T2
Ни один коэффициент не равен нулю или бесконечности. Следовательно, как видно из (6.15), все коэффициенты ошибки отличны от нуля. Тогда в формуле (6.13) присутствуют все слагаемые и даже при постоянном воздействии на входе системы x(t) = A ошибка ξ (1) будет конечной, не равной нулю:
Пример 6. 4. Превратим систему в астатическую 1-го порядка:
A (p) = P + P2T; С0 = 0; С1 = 1; С2 = T; G (p) = K + P + P2T; A0 = K; A1 = 1; A2 = T
Наличие интегрирующего звена приводит к отсутствию в знаменателе свободного члена не содержащего р. Отсюда - равенство нулю коэффициента С0 и, как следствие, коэффициента S0. Остальные коэффициенты С1, C2 не равны нулю, поэтому и S1, S2,... тоже не равны нулю. Теперь, при подаче на вход системы постоянного воздействия, ошибки не будет:
ξ (t)=S0A=0A=0
При подаче на вход линейно возрастающей функции х(t)=Аt ошибка будет, но она будет постоянной:
Пример 6. 5. Увеличим астатизм системы, добавив еще одно интегрирующее звено:
(для устойчивости системы)
A (p) = P2 + P3T2; C0 = C1 = 0; C2 = 1; С3 = T2; G(p) = K + KpT1 + P2 + P3T2; A0 = K; A1 = KT1; A2 = 1; A3 = T3.
Если воспользоваться формулами (6.15), то легко видеть, что два первых коэффициента ошибки равны нулю и в формуле (6.13) уже будут отсутствовать первые два слагаемых. Теперь при подаче на вход сигнала x(t) = At ошибка будет равна нулю. Таким образом, наблюдается очень интересная закономерность: с возрастанием порядка астатизма исчезают, начиная с S0, коэффициенты ошибки, а в формуле (6.13) исчезают слагаемые, начиная с первого. Однако не следует увлекаться астатизмом высоких порядков: интегрирующие звенья вносят фазовый сдвиг по -90 каждое. Поэтому уже при втором порядке астатизма возникают проблемы с устойчивостью системы. В связи с этим появляется необходимость вводить в систему дополнительные, так называемые корректирующие звенья. Тем не менее системы с порядком астатизма выше второго практически не используются. Однако не следует отчаиваться: уничтожение в формуле (6.13) даже первых двух слагаемых очень сильно уменьшает ошибку регулирования, так как эти слагаемые самые мощные и именно они вносят основной вклад в формирование ошибки регулирования.
Выводы 1. Ошибка регулирования зависит как от формы управляющего сигнала, так и порядка астатизма системы. 2. Чем более динамичный входной сигнал, тем больший порядок астатизма требуется для сведения ошибки к нулю. 3. Для получения нулевой ошибки регулирования порядок астатизма должен быть на единицу больше числа ненулевых производных входного сигнала х(t). 4. Если порядок астатизма равен числу ненулевых производных функции x(t), то ошибка будет постоянной. 5. Если порядок астатизма меньше числа ненулевых производных входного сигнала, то ошибка регулирования будет возрастать со временем и может превысить допустимое значение. 6. Даже при очень динамичных входных сигналах х(t) есть смысл использовать астатические системы хотя бы первого порядка, ибо они исключают из состава ошибки самые мощные компоненты. 7. Увеличение коэффициента усиления системы, увеличивая коэффициент А0, уменьшает ошибку регулирования (см. (6.15)).
УСТОЙЧИВОСТЬ АВТОКОЛЕБАНИЯ
Под устойчивостью нелинейных систем подразумевают отсутствие в ней автоколебаний и устойчивость обычного равновесного состояния. Говоря об устойчивости автоколебаний, имеют в виду такой их режим, который удерживается в системе при различных отклонениях параметров системы, произошедших по любой причине. В отличие от линейных систем, в которых ответ на вопрос об устойчивости однозначен (либо "да", либо "нет"), у нелинейных систем есть интересная особенность: в них могут отсутствовать автоколебания при некоторых относительно небольших внешних воздействиях, и они при этом проявляют все внешние признаки устойчивых систем. Вместе с тем возможна ситуация, когда после приложения к системе воздействия большой амплитуды в ней зарождаются автоколебания, которые не прекращаются после снятия внешнего воздействия. Про такие системы говорят, что они устойчивы "в малом", но неустойчивы "в большом". Есть различные способы решения вопроса об устойчивости нелинейных систем. В рамках данной темы мы рассмотрим в основном графоаналитический метод Л. С. Гольдфарба и лишь в конце свяжем его с характером фазового портрета нелинейной системы. Метод X С. Годьдфарба
Методом Л. С. Гольдфарба удобно анализировать устойчивость не- линейных систем и устойчивость автоколебаний в нелинейных системах. В основу метода положена идея гармонической линеаризации и используется характеристическое уравнение гармонически линеаризованной системы:
Кл(р) Кн1(РА) + 1 = 0
Или, переходя к частотным функциям:
Кл(iw) Кн1 (iw, А) + 1 = 0. (8.1)
Здесь Кл (iw) - частотная характеристика линейной части системы. Такой подход четкого разделения характеристик линейной части системы Кл (iw) и нелинейной части Кн1 (iw, А) автоматически означает, что метод Л. С. Гольдфарба может быть применен только тогда, когда в структурной схеме нелинейной системы можно четко и однозначно выделить одну линейную часть и одну нелинейную часть. Если этого сделать нельзя, необходимо использовать другие методы анализа нелинейных систем. Для безреактивных нелинейных звеньев, где Кн1 не зависит от частоты, уравнение (8.1) можно записать проще:
Кл(iw)Kн1(А)= -1 (8.2) Фактически здесь записано условие баланса фаз и амплитуд для наличия автоколебаний в системе автоматического регулирования. В самом деле, наличие в контуре регулирования модуля усиления, равного 1, и 1800 фазового сдвига достаточно для автоколебаний, так как недостающие 180° внесет сумматор системы и баланс фаз будет обеспечен. Заслугой Л. С. Гольдфарба является то, что он предложил удобное решение уравнения (8.2) на комплексной плоскости. Представим для этого уравнение (8.2) несколько иначе:
Теперь можно на комплексной плоскости построить годограф Кл(iw), являющийся функцией частоты, и годограф - 1/Кн1(А), являющийся функцией амплитуды. Если оба годографа построены в одинаковом масштабе, то точка их пересечения будет решением уравнения (8.3), так как оба вектора совпадут как по длине, так и по углу наклона к вещественной оси. Амплитуду и частоту автоколебаний определить очень просто -аргумент функции Кл(iw) в точке пересечения дает частоту, а аргумент функции - 1/Kн1 (A) - амплитуду автоколебаний (амплитуда на входе нелинейного элемента). Если точек пересечения несколько, то в системе возможно существование нескольких периодических процессов. Однако среди всех возможных в этом случае автоколебаний могут быть как устойчивые, так и неустойчивые. Для определения устойчивости автоколебаний существует простое правило: если при приращении аргумента +∆А точка годографа -1/Кн1(А) выходит из замкнутой кривой Кл (iw), то такая точка является точкой устойчивых автоколебаний, а если точка на годографе - 1/Kн1 (A) входит внутрь годографа Кл (iw), то в таком случае колебания существовать не могут, ибо малейшее изменение режима приведет к лавинообразному удалению автоколебаний от неустойчивой точки. Совместное изображение на одной координатной системе годографов Кл(iw) и - 1/Кн1(А) часто называют диаграммой Гольдфарба. Поскольку здесь используется коэффициент передачи нелинейного звена Кн1(А) по первой гармонике, правило, при котором можно пользоваться гармонической линеаризацией, остается в силе. Это значит, что анализ по Гольдфарбу будет справедлив только тогда, когда линейная часть системы имеет характеристику типа "фильтр нижних частот", т.е. на высоких частотах имеется спад частотной характеристики, обеспечивающий подавление высших гармоник частоты автоколебаний. Конечно, может возникнуть вопрос: "Может же быть так, что и при наличии линейной части с характеристикой типа ФНЧ первая гармоника будет не очень высокой частоты и в полосу пропускания ФНЧ войдут и вторая и даже третья гармоники?" Обычно такого не происходит. Ведь если возникают автоколебания, значит, в линейной части уже накоплен значительный фазовый сдвиг, а это бывает уже на скате АЧХ, так что вторая и высшие гармоники оказываются существенно подавленными. Поэтому при исследовании автоколебаний в нелинейной системе условие наличия ФНЧ в линейной части оказывается достаточным для правомочности использования понятия гармонической линеаризации. Пример 8.1. Пусть линейная часть нелинейной системы содержит 3 инерционных звена, а нелинейная часть имеет характеристику типа "насыщение". Тогда диаграмма Гольдфарба будет выглядеть следующим образом (рис. 8.1). Если коэффициент усиления линейной части достаточен для того, чтобы годографы пересеклись, как и показано на рис. 8.1, то в системе будут автоколебания, причем устойчивые, так как годограф нелинейной части - 1/Кн1 (А) в точке пересечения по-
Рис. 8. 1
кидает пределы комплексной плоскости, очерченные годографом линейной части Кл(iw). На этом примере очень наглядно можно показать, почему правило Гольдфарба для устойчивости автоколебаний именно такое. В самом деле, для баланса амплитуд автоколебаний в системе необходимо, чтобы любая флуктуация коэффициента передачи линейной части системы компенсировалась обратным по закону изменением Кн1(А) нелинейной части. В данном случае это имеет место. Так если, например, коэффициент усиления линейной части по какой-то причине уменьшится, то, чтобы не исчезли автоколебания, необходимо увеличить коэффициент передачи Кн1(А) нелинейной части. Точно так и происходит (см. табл. 7.2). В свою очередь для уменьшения Кн1(А) значение обратной функции должно увеличиться. Вот почему ее годограф удаляется от начала координат. А наличие знака "минус" отбрасывает этот годограф на отрицательный отрезок вещественной оси, и он уходит в бесконечность при А →∞ (сама функция Кн1 (А) при этом стремится к нулю). Пример 8. 2. Пусть линейная часть нелинейной системы содержит
а нелинейная часть имеет характеристику по рис. 7. 4 из примера 7.1. Возможны ли автоколебания? Диаграмма Гольдфарба для данного примера приведена на рис. 8. 2. Значение коэффициента усиления линейной части выбрано достаточно большим для того, чтобы годографы линейной и нелинейной части
Рис. 8. 2
пересекались дважды, при А = А1, и А = А2. Согласно правилу Гольдфарба автоколебание будет устойчивым с амплитудой А1. При А = А2 автоколебание возможно лишь теоретически, так как любая флуктуация коэффициента усиления линейной части будет усиливаться характеристикой нелинейной части (а должна подавляться). В этом случае автоколебание либо "перескочит" в точку устойчивых автоколебаний с амплитудой А = А1, либо устремится в бесконечность, в зависимости от направления первичной флуктуации, "выбивающей" автоколебание из точки А = А1. Точка А1 является точкой устойчивых автоколебаний. Точка А2 является точкой неустойчивых автоколебаний. Что касается частоты автоколебаний, то, поскольку оба пересечения происходят на отрицательном отрезке вещественной оси, частота обоих автоколебаний (устойчивого и неустойчивого) будет одинаковой и определится по годографу линейной части. Конкретно, это будет частота wo, на которой φ(w) линейной части равен (-180°). Пример 8. 3. Линейная часть системы имеет передаточную функцию
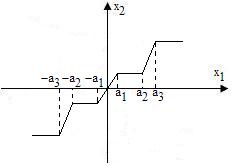
т. е., одно интегрирующее звено, одно форсирующее и четыре инерционных с постоянными времени Т2. Характеристика нелинейной части системы приведена на рис. 8. 3.
Рис. 8. 3
Возможны ли автоколебания? Диаграмма Гольдфарба показана на рис. 8. 4. Здесь коэффициент усиления линейной части выбран таким, чтобы было 3 пересечения годографа Кл(iw) с годографом - 1/Кн1 (А) нелинейной части. Эти пересечения на одной частоте wо, но c разными амплитудами A1, А2, A3, причем А3> A2> A1.
Рис. 8. 4 В такой ситуации мы имеем две точки устойчивых автоколебаний при А=А1, А=А3 и одну точку неустойчивых автоколебаний при А=А2. Поскольку точек устойчивых автоколебаний все же две, возникает вопрос: при какой амплитуде будет происходить автоколебание? Ответ простой: все зависит от начальных условий. Если на систему подать питание и не подвергать ее никаким входным воздействиям, возникнет автоколебание в "мягком" режиме, дорастет до амплитуды А1 на входе нелинейного эвена а2 >А> а1 (см. рис. 8.3) и это автоколебание будет устойчиво. Если попытаться внешним воздействием "выбить" систему из этого устойчивого автоколебания, то при слабых внешних воздействиях это не удастся сделать, а при сильных - удастся. В частности, если приложить внешнее воздействие большой амплитуды, то можно вывести систему на второй устойчивый режим автоколебаний с амплитудой А3 и оно будет устойчивым. Но если отключить источник питания, а потом вновь включить, возврата ко второму устойчивому режиму с амплитудой А3 не будет, а зародятся автоколебания первого устойчивого режима с амплитудой А1. Здесь можно говорить о "мягком" режиме самовозбуждения с амплитудой А1 и "жестком" режиме возникновения автоколебания с амплитудой А3. Следовательно, в данной системе одновременно не может быть автоколебаний с двумя амплитудами А1 и А3, а только что-то одно. Что касается автоколебаний с амплитудой А2, то, несмотря на наличие при А=А2 и баланса фаз, и баланса амплитуд, такое автоколебание существовать сколь-либо долго не может. Обязательно при малейшей флуктуации амплитуды автоколебание перейдет либо к амплитуде А1, либо к А3. Все сказанное выше гораздо нагляднее можно продемонстрировать фазовым портретом данной системы, как, впрочем, и некоторых других примеров.
8. 2. Связь между диаграммой Д. С. Гольдфарба и фазовым портретом системы
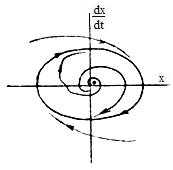
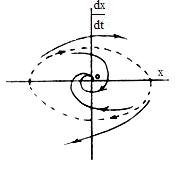
Как известно, фазовый портрет системы - это семейство фазовых траекторий, зарисованных для различных начальных условий на фазовой плоскости. В частности, для устойчивых систем все фазовые траектории стремятся в точку устойчивого равновесия (рис. 8.5,а), тогда как в системе с устойчивым автоколебанием на фазовом портрете имеется замкнутый устойчивый предельный цикл, к которому асимптотически приближаются все рядом лежащие фазовые траектории (рис.8.5.б). Интересно то, что предельных замкнутых циклов может быть несколько - по количеству пересечений годографов на диаграмме Гольдфарба. При этом для каждой точки пересечения на диаграмме Гольдфарба, соответствующей устойчивому автоколебанию, присутствует устойчивый предельный замкнутый цикл на фазовом портрете.
Рис. 8. 5
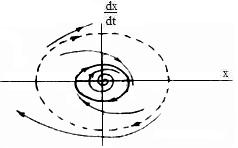
Он обычно рисуется сплошной замкнутой линией в виде эллипса или окружности (в частном случае). Что касается точек пересечения годографов, обозначающих наличие неустойчивых автоколебаний, то на фазовом портрете им соответствуют замкнутые неустойчивые предельные циклы, обычно рисуемые в виде пунктирных замкнутых кривых. С них как бы "скатываются" в разные стороны, рядом лежащие фазовые траектории, т.е., без посторонней вынуждающей силы (скажем, внешнего генератора гармонического колебания) по пунктирной траектории изображающая точка фазового портрета двигаться ощутимое время не может. Рассмотрим несколько примеров. Пример 8.4. Рассмотрим фазовый портрет системы с диаграммой Гольдфарба по рис. 8.1 из примера 8.1. Там мы имеем единственное пересечение годографов, причем оно соответствует устойчивому автоколебанию. Фазовый портрет такой системы изображен на рис. 8.5,б. Все траектории стремятся к устойчивому замкнутому циклу как изнутри его, так и снаружи. Пример 8.5. Вернемся к рассмотрению диаграммы Гольфарба рис. 8.2, где имеются две точки пересечения годографов. Фазовый портрет такой системы представлен на рис. 8. 6. На нем очень хорошо просматривается выход изображающей точки по спиральной траектории на устойчивый предельный цикл с амплитудой А1. Если принудительно поместить рабочую точку в область между двумя предельными циклами, а затем убрать внешнее воздействие, фазовая траектория снаружи вернется на устойчивый замкнутый цикл. И только если поместить рабочую точку за пределы второго, неустойчивого замкнутого цикла, то фазовая траектория устремится в бесконечность. Она не сможет преодолеть неустойчивый замкнутый цикл с амплитудой А2 и попасть на устойчивый с амплитудой А1. Так что неустойчивый замкнутый предельный цикл является для фазовых траекторий как бы непреодолимым "водоразделом". Преодолеть его можно только с помощью внешнего генератора (внешней силы).
Рис. 8.6
Пример 8.6. Рассмотрим систему с диаграммой Гольдфарба по рис. 8.4. Здесь три точки пересечения годографов, причем две из них соответствуют наличию устойчивых автоколебаний. Фазовый портрет представлен на рис. 8.7. На нем видны два устойчивых предельных цикла с амплитудами А1 и А3 и один неустойчивый с амплитудой А2. Общее число замкнутых циклов соответствует числу пересечений годографов на диаграмме Гольдфарба.
Рис. 8. 7 Выводы
1. Если годографы на диаграмме Л. С. Гольдфарба не пересекаются, то нелинейная система абсолютно устойчива и в ней не могут существовать автоколебания. 2. Если годографы пересекаются, то система не является устойчивой и в ней могут существовать автоколебания. Они могут быть как устойчивыми, так и неустойчивыми, но в любом случае систему устойчивой считать нельзя. 3. Между диаграммой Л. С. Гольдфарба и фазовым портретом системы имеется взаимосвязь. Каждой точке пересечения годографов на диаграмме Гольдфарба соответствует замкнутый предельный цикл на фазовом портрете, который может быть как устойчивым, так и неустойчивым. Это зависит от характера пересечения годографов и удовлетворения условия Гольдфарба для устойчивости автоколебаний. 4. На фазовом портрете предельные замкнутые циклы перемежаются. Любые два устойчивых замкнутых цикла разделены неустойчивым, и наоборот.
РАДИОАВТОМАТИКА
Методические указания к индивидуальной работе для студентов 3 курса специальности "Радиотехника" дневного отделения
Новосибирск
Составил канд. техн. наук, доц. С. Е. Лявданский
Рецензент д-р техн. наук, проф. Т.Б. Борукаев
Работа подготовлена кафедрой радиоприемных и радиопередающих устройств
© Новосибирский государственный технический университет, 1995
Тема 6. КАЧЕСТРО РЕГУЛИРОВАНИЯ В ЛИНЕЙНЫХ СИСТЕМАХ РАДИОАВТОМАТИКИ
Общие понятия и определения
Качество регулирования - важнейшая характеристика автоматической системы. Вопрос о нем рассматривается проектировщиком системы сразу после проверки устойчивости, ибо, не обеспечив устойчивости, говорить о качестве не имеет смысла. Понятие качества регулирования автоматической системы довольно многопланово. В различных ситуациях проектировщика и эксплуатационника системы могут интересовать различные аспекты качества регулирования. Выделим три из них. 1. Качество регулирования в установившемся и вынужденном 2. Качество регулирования в переходном режиме. 3. Качество регулирования при воздействии на систему В данной теме рассматривается лишь первый аспект проблемы -качество регулирования при воздействии на систему детерминированного сигнала, который может быть представлен аналитической Функцией, абсолютно дифференцируемой на любом отрезке. Например:
x(t)= At³+Bt²-ct; x(t)= B Cos Wt
x(t)= Ae α1t +Be –α2t
и т. п.
Под качеством регулирования в этом случае подразумевают величину ошибки регулирования, причем, чем она меньше, тем выше качество. Ошибкой считается отклонение реального состояния регулируемого параметра объекта регулирования от заданного. Например, пусть мы имеем электронно управляемый ВЧ генератор, частота которого должна изменяться по закону внешнего управляющего сигнала f1 (t). Реальное значение частоты генератора, как правило, не будет точно копировать закон f1 (t), оно будет описываться другой функцией f2 (t). В этом случае ошибкой регулирования будет считаться разница
ξ(t)=f1 (t)-f2 (t)
Замкнутые системы радиоавтоматики построены таким образом, что в их структурной схеме обязательно присутствует главный сумматор системы, являющийся по существу вычитателем. Именно на него возлагается функция выделения разницы между действительным и требуемым значениями регулируемого параметра объекта регулирования.
Рис. 6.1
На рис. 6.1 показана простейшая структура следящей системы, где К(р) - передаточная функция разомкнутой системы; здесь х(t) – управляющее воздействие; у(t) - результат регулирования.
Сигнал на выходе главного сумматора ξ (t) является сигналом ошибки.
  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


 (6.12)
(6.12)
 (6.13)
(6.13) ;
;  ; (6.15)
; (6.15) ;
; 




 T1>T2
T1>T2 (8.3)
(8.3)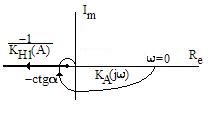

 а) б)
а) б)