|
|
Свойства гироскопов, вытекающие из нее.Теорема о кинетическом моменте и основные H=r*m*V=r*m*Ω*r*sin90=mr2 Ω=IΩ Первая производная по времени от вектора кинетического момента тела равна вектору главного момента всех внешних сил, действующих на тело. Теорема о кинетическом моменте: скорость конца вектора кинетического момента твердого тела относительно некоторой точки равна вектору главного момента всех сил, действующих на тело относительно той же точки.
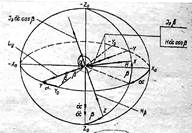
Третье свойство выражается в следующ ем. Под действием импульса силы (удара)главная ось гироскопа практически не изменяет первоначального направления, а лишь совершает быстрые колебания около положения равновесия .Эти колебания называются нутацией. Они особенно хорошо заметны при небольшой угловой скорости собственного вращения ротора Свойства гироскопа с тремя степенями свободы используются в таких устройствах, как гирокомпасы, гирогоризонты, гиростабилизаторы индикаторного типа. Свойство вращающегося симметричного тела с двумя степенями свободы. Гироскоп с двумя степенями получим, если гироскоп с тремя степенями свободы лишим одной степени свободы, например вокруг оси Z—Z (см. рис. 1.1), путем жесткого соединения кольца 3 с основанием 4. В результате будем иметь устройство, изображенное на рис. 1.2.Гироскоп с двумя степенями свободы не обладает ни одним из тех свойств, которые имеет гироскоп с тремя степенями свободы. Свойство, присущее только гироскопу с двумя степенями свободы, заключается в следующем. Если придать основанию, на котором установлен гироскоп, вращение вокруг оси Z-Z, т.е. оси, не совпадающей с осью собственного вращения ротора и осью подвеса Y—Y, то ротор вместе с кольцом подвеса поворачивается вокруг оси подвеса до тех пор, пока ось X-X собственного вращения ротора не совпадет с осью вращения основания, т.е. с осью Z-Z вынужденного вращения гироскопа. На основе свойства гироскопа с двумя степенями свободы работают гиротахометры (дифференцирующие гироскопы), интегрирующие гироскопы и др. Составление уравнений движения гироскопа способом Кудревича: 1.Выбираем систему координат OXоYоZo неподвижную в пространстве (т.е. связанную со звездами). 2. Выбранная система координат не имеет углового движения, вследствие чего по этому пункту никаких действий не выполняем. 3. В качестве системы координат, связанной с гироскопом, принимаем систему осей Резаля QXYZ, т. е. систему осей, связанных с гироскопом во всех его движениях, кроме собственного вращения. 4.Сообщаем гироскопу отклонения на углы α и β(Рис. 1.8),оба в положительном направлении. 5. Наносим векторы угловых скоростей α и β (с точками наверху) 6.Определяем проекции q = β (с точкой); r = α (с точкой) * cosβ. 7.Находим гироскопические моменты:Hr = H* α (с точкой) cos β (направлен в отрицательную сторону); H*q = H* β (с точкой) (направлен в положительную сторону). 8. Находим угловые ускорения α и β (с 2 точками наверху) (оба вектора направлены в ту же сторону, что и векторы α и β (с точками наверху)) 9. Определяем инерционные моменты Jэ * α (с 2 точками наверху) cos β и Jэ* β (с 2 точками наверху). 10. Предполагаем, что на гироскоп действует сила F, которая создает момент относительно оси OY. Вектор момента лежит в положительном направлении оси OY. Нанесем вектор этого момента Lу на чертеж. Считаем, что никакие другие моменты внешних сил на гироскоп не действуют. 11.Моментов сил инерции нет. Так как читаем. Что точка О неподвижна или движется равномерно. Поэтому никаких действий по данному пункту не выполняем. 12.Суммирование моментов по осям OY и OZ приводит к следующим двум уравнениям, образующим систему: Jэ* β (с 2 точками наверху) + H* α (с точкой) *cos β = Lу, Jэ* α (с 2 точками наверху) - H * β (с точкой) = 0.
13. Считая, что углы отклонения гироскопа относительно заданного положения малые, т.е. полагая cos β = 1, получим задающую линейную систему диф.уравнений, характеризующую поведение гироскопа под действием момента внешней силы: Jэ* β (с 2 точками наверху) + H* α (с точкой) = Lу; Jэ* α (с 2 точками наверху)- H* β (с точкой)=0. 14. Нет необходимости в выполнении действий.
Классификация гироскопов. Перспективные типы гироскопов. В качестве гироскопа могут применяться вращающиеся твердые, жидкие и газообразные тела. Практически доказана возможность использования гироскопических свойств частиц — атомных ядер или электронов, обладающих спиновым или орбитальным моментами. На базе оптических квантовых генераторов созданы лазерные гироскопы. В настоящее время на морском флоте наибольшее распространение получили гироскопы в которых используется динамически симметричное быстровращающееся твердое тело (ротор). подвешенное таким образом, что ось его собственного вращения может произвольно изменять направление в пространстве. Следовательно, основными частями гироскопа являются: ротор и его подвес. Ось собственного вращения ротора называется главной осью гироскопа (осью фигуры). Две любые другие оси, лежащие в плоскости собственного вращения ротора и перпендикулярные между собой и к главной оси, называются экваториальными Все гироскопы (гироскопические чувствительные элементы) можно разделить на два класса в зависимости от того, что является объектом подвеса: камера (оболочка), содержащая быстровращающийся ротор (или систему роторов). В этом классе гироскопов применяют карданный, гидростатический (в сочетании с электромагнитным или упругим подвесом), а также газостатический подвес; собственно быстровращающийся ротор(подвесы - электростатический, гидродинамический, электромагнитный, криогенный, газодинамический, а также упругий вращающийся). В тех гироскопах, в которых для подвеса используется электростатическое или электромагнитное поле либо давление жидкости или газа, собственно ротор или камера, содержащая ротор, как правило, имеет сферическую форму. Эта форма наиболее удобна с точки зрения обеспечения симметрии действующих сил поддержания.
  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|