|
|
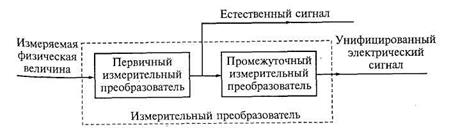
Датчики с обратной связью обладают высокой чувствительностью и позволяют легко изменять параметры настройки путем изменения коэффициентов преобразования обратной цепи.Структурные схемы реальных ИП могут представлять собой любую комбинацию из рассмотренных выше типовых структур. В цепи последовательного преобразования измеряемого сигнала принято различать первичный измерительный преобразователь (чувствительный элемент) и промежуточные преобразователи (рис. 2.2). Измеряемая величина воздействует непосредственно на первичный преобразователь. Очень часто метод первичного преобразования входной величины определяет наименование всего измерительного преобразователя или прибора. Промежуточные преобразователи могут выполнять функции усиления, линеаризации, преобразования рода сигнала и др. В частности, на рис. 2.2 представлена упрощенная схема ИП с естественным и унифицированным выходами.
Рисунок 2.2 Блок-схема последовательного преобразования Унификация и стандартизация измерительных преобразователей В отечественном приборостроении вопросы унификации и стандартизации измерительных преобразователей решаются в рамках Государственной системы промышленных приборов и средств автоматизации. Для того чтобы создавать сложные информационные системы (управляющие, измерительные), необходимо в первую очередь обеспечить информационную совместимость технических средств. С этой целью в рамках ГСП сначала были унифицированы, а затем и стандартизированы выходные сигналы ИП (ГОСТ 26.010— 83, 26.011-83, 26.013-83, 26.014-83). По виду выходных сигналов различают измерительные преобразователи с естественным и унифицированным выходными сигналами. Первые представляют собой устройства, в которых осуществляется первичное (обычно однократное) преобразование измеряемой физической величины. Естественное формирование сигнала здесь обеспечивается методом преобразования и конструкцией ИП. Такие преобразователи чаще всего применяют в устройствах прямого регулирования либо при централизованном контроле сравнительно простых объектов. В ГСП приняты десять типов естественных выходных сигналов (рис. 2.3).
Рисунок 2.3 Виды сигналов измерительных преобразователей При создании относительно сложных систем с использованием ЭВМ и необходимости передачи сигналов на большие расстояния применяют преобразователи естественных сигналов в унифицированные. Для этих целей разрабатываются специальные нормирующие преобразователи, параметры выходных сигналов которых приведены на рис. 2.3. Отдельную группу составляют преобразователи с дискретным (релейным) выходным сигналом, контактная группа которых изменяет свое положение при достижении измеряемой величиной заданного значения. Их применяют для позиционного регулирования и сигнализации.
Тема 3 Первичные преобразователи с электрическими выходными сигналами. Основные понятия. Одним из главных элементов в любой системе автоматики и телемеханики являются электрические датчики. Назначение датчика — преобразование контролируемой или регулируемой величины в величину другого рода, удобную для дальнейшего использования. В большинстве случаев датчики преобразуют неэлектрическую величину в электрическую, например температура преобразуется при помощи термопары в ЭДС, а механическое перемещение, связанное с изменением положения якоря электромагнита, изменяет индуктивность его обмотки. В некоторых случаях с помощью датчиков производится преобразование одних электрических величин в Другие. В качестве таких датчиков могут служить усилитель, измерительный трансформатор или фазочувствительная схема. По характеру электрических величин, получаемых на выходе, электрические датчики делятся на параметрические, или пассивные, и генераторные, или активные. К параметрическим датчикам относятся такие элементы, у которых изменение контролируемой величины вызывает соответствующее изменение параметра электрической цепи (активного сопротивления, индуктивности или емкости). К генераторным относятся такие датчики, которые сами являются источниками электрической энергии, причем возникающая на выходе энергия пропорциональна контролируемой величине. К электрическим датчикам независимо от типа и устройства предъявляются следующие основные требования: · надежность в работе; · достаточная чувствительность, что позволяет существенно упростить схему системы, например автоматического контроля. В этом случае отпадает необходимость в усилении сигнала, точность системы повышается; · непрерывная зависимость его выходной величины y от входной x, т. е. y = f(x), где x - контролируемая величина, а y - выходная, изменяющаяся от величины x; · минимальные габаритные размеры и вес; · необходимый диапазон изменения параметров; · отсутствие обратного воздействия датчика на измеряемый процесс. Так, например, при изменении температуры контролируемой среды из-за наличия в ней датчика может появиться значительная погрешность измерения; · небольшая инерционность (интервал времени между изменением входной величины и соответствующим изменением выходной величины); · работа в заданных условиях окружающей среды. На работу электрических датчиков оказывают влияние следующие факторы: периодичность и максимальная частота процесса, знакопеременность кривой изменения процесса и наличие в ней постоянной составляющей, температурные условия места измерения, атмосферные условия (влажность, температура воздуха и т.д.), наличие вибрации, ускорений или сотрясений в установке и др.
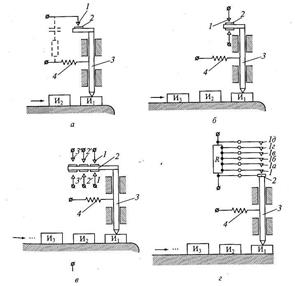
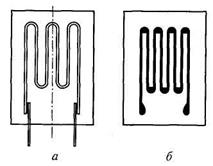
Электроконтактные датчики Контактные датчики — это датчики параметрического типа, в которых изменяется электрическое сопротивление при изменении той или иной механической величины. Они предназначены для преобразования механического перемещения в электрический сигнал. При достижении измеряемой величиной определенного значения замыкаются или размыкаются электрические контакты, включенные в те или иные цепи, которые сигнализируют, что перемещение больше или меньше определенного значения. Контактные датчики широко применяются в системах автоматического контроля и сортировки размеров, а также в системах автоматической сигнализации различных физических величин. Статическая характеристика контактного датчика имеет релейный характер, так как его выходная величина — сопротивление электрической цепи — изменяется скачком. На рис. 3.1, а изображен простейший контактный датчик с одной парой контактов — однопредельный. Замыкание контактов1 и 2 происходит в результате изменения размера изделия И. Если размер изделия И увеличивается, то измерительный щуп 3 перемещается вверх, в результате чего контакты 1 и 2 приходят в соприкосновение. При этом активное сопротивление между контактами 1 и 2 изменяется от бесконечности до ничтожно малого значения, определяемого контактным сопротивлением. Выводы датчика подключаются к сигнальному устройству. Пружина 4 соединяет измерительный щуп 3 с одним из выводов.
Рисунок 3.1 Основные типы контактных датчиков: а- однопредельный, б- двухпредельный, в,г- многопредельные. 1,2,2’,3’,1а…1д – контакты, 3- измерительный щуп, 4- пружина.
На рис. 3.1, б изображен двухпредельный контактный датчик — с двумя парами контактов, способный реагировать на перемещение щупа в обе стороны от начального (нулевого) положения. Подобные датчики широко используются для автоматического контроля размеров деталей и подсчета количества выпускаемой продукции. Многопредельный контактный датчик с несколькими парами контактов показан на рис. 3.1, в. Его контакты 1, 2' и 3' замыкаются последовательно друг за другом в зависимости от размеров деталей. Стрелка измерительного прибора, включенного на выходе датчика, показывает три размера. Иногда контактные датчики могут работать либо на замыкание (размыкание) всей цепи, либо на замыкание части одного из сопротивлений R резистора цепи (рис. 3.1, г).
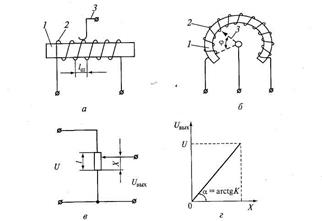
Потенциометрические датчики Измерительные преобразователи, выполненные в виде реостата, подвижный контакт которого перемещается под воздействием входной измеряемой величины, называются реостатными измерительными преобразователями. Чаще всего реостатные ИП включаются в измерительную цепь по схеме потенциометра, поэтому в ряде источников используется термин «потенциометрические преобразователи». Выходной величиной ИП является электрическое сопротивление, функционально связанное с положением подвижного контакта. Реостатные преобразователи служат для преобразования угловых или линейных перемещений в соответствующее изменение сопротивления, тока или напряжения. Так как в перемещение могут быть преобразованы многие неэлектрические величины (давление, расход, уровень и др.), то реостатные преобразователи очень часто используют в качестве промежуточных преобразователей неэлектрических величин в электрические. В зависимости от материала чувствительного элемента реостатные преобразователи разделяются на проволочные и непроволочные. В устройствах автоматики широко применяют проволочные реостатные преобразователи, которые отличаются высокой точностью и стабильностью функции преобразования, имеют малое переходное сопротивление, низкий уровень собственных шумов, малый температурный коэффициент сопротивления (ТКС). К их недостаткам относятся низкая разрешающая способность, сравнительно невысокое сопротивление (до десятков кОм), ограниченная возможность применения на переменном токе, обусловленная остаточными индуктивностью и емкостью намотки. В зависимости от конструктивного исполнения различают реостатные преобразователи с поступательным и вращательным перемещением подвижного контакта. Последние, кроме того, делятся на одно- и многооборотные.
Рисунок 3.2 Потенциометрические датчики: а- линейный; б- угловой; в- схема включения; г- статическая характеристика; 1- каркас; 2 – провод; 3- токосъёмный контакт
Подвижный контакт (щетка, движок) выполняют в виде двух-трех параллельных проволочек диаметром 0,1...0,2 мм, несколько отличающихся по длине (для прецизионных реостатных преобразователей), или из специально профилированной пластины с разрезами. Ширина контактной поверхности щетки должна быть равна двум-трем диаметрам проволоки чувствительного элемента. К зажимам обмотки реостата подключается напряжение U постоянного или переменного тока неизменного значения. При перемещении движка выходное напряжение UВЫХ меняется пропорционально входной величине X. Таким образом осуществляется преобразование перемещения в напряжение (рис. 3.2, в). Учитывая, что по конструктивным особенностям R = l, r = X, где R — полное сопротивление преобразователя; l — длина намотки обмотки; r — сопротивление части обмотки, приходящейся на перемещение X движка реостата, функция преобразования будет иметь вид:
где K — коэффициент преобразования.
Для преобразователя углового перемещения в режиме холостого хода функции преобразования UВЫХ = Kφ, где φ - угол поворота движка от нулевого положения (см. рис. 3.2, б). Анализ полученных выражений для функций преобразования показывает, что статическая характеристика линейных потенциометров при отсутствии нагрузки представляет собой прямую, проходящую через начало координат под углом α = arctgK (рис. 3.2, г). Как следует из приведенной статической характеристики, рассмотренные преобразователи относятся к однотактным элементам, т е. они не реагируют на знак входного сигнала. В ряде случаев необходимы преобразователи, учитывающие знак входного сигнала, — двухтактные измерительные преобразователи. Их можно построить на основе однотактных потенциометрических преобразователей, если снимать выходной сигнал с движка и средней точки потенциометра или с диагонали мостовой схемы, образованной двумя потенциометрическими датчиками со средней точкой. Два возможных варианта включения потенциометрических датчиков по двухтактной схеме приведены на рис. 3.3, а, б. Их статические характеристики имеют разную крутизну. Это объясняется тем, что при включении преобразователей по мостовой схеме (см. рис. 3.3, б), изменение входного сигнала отрабатывается двумя движками, смещающимися в разные стороны от средней точки, что приводит к появлению удвоенного выходного напряжения по сравнению со схемой, представленной на рис. 3.3, а.
Рисунок 3.3 Варианты включения двухтактных потенциометрических датчиков: а- с испольэованием средней точки; б- по мостовой схеме
Наряду с линейными преобразователями в системах автоматики и управления широко применяют функциональные преобразователи. Для получения функциональных реостатных преобразователей используют следующие способы: изменение диаметра провода вдоль намотки; изменение шага намотки; применение каркаса определенной конфигурации; шунтирование участков линейного потенциометра сопротивлениями различных значений. Первые два способа сопряжены с технологическими трудностями и на практике не применяются. К достоинствам проволочных реостатных преобразователей можно отнести: простоту конструкции; малые размеры и массу; возможность получения необходимых функциональных зависимостей относительно простыми средствами; получение высокоточных линейных статических характеристик; стабильность характеристик; малое переходное сопротивление; возможность работы на переменном и постоянном токе; малый ТКС. Недостатками этих элементов следует считать: наличие скользящего контакта, который может стать причиной отказа из-за окисления контактной дорожки, перетирания витков или отгибания движка; сравнительно небольшой коэффициент преобразования и высокий порог чувствительности; наличие шума; подверженность электроэррозии под действием импульсных разрядов; ограниченную скорость линейного перемещения или вращения (до 100...200 об/мин) токосъемника вследствие его вибраций при переходе с витка на виток и повышение при этом уровня динамического шума; ограниченную частоту переменного тока (до 1000 Гц); низкую износоустойчивость.
Тензометрические датчики В основе работы тензометрических датчиков (тензорезисторов) лежит тензоэффект; заключающийся в изменении активного сопротивления проводниковых и полупроводниковых материалов при их механической деформации (растяжении или сжатии). R = ρl/s (3.1) Тензорезисторы используют для измерения давления жидкости и газа, а также при измерении упругих деформаций материалов: давлений, изгибов, скручивания и т.д. Характеристикой тензоэффекта материала служит коэффициент тензочувствительности КТ, определяемый как отношение изменения сопротивления к изменению длины проводника:
где δR = ΔR/R; δl = Δl/l; ΔR — приращение сопротивления при изменении длины l на Δl; Е — модуль упругости материала; σ — механическое напряжение.
где μ — коэффициент Пуассона; δρ — относительное приращение удельного сопротивления р материала при деформации. Коэффициент тензочувствительности металлов, наиболее часто применяемых для тензорезисторов, близок к двум: для константана — 2; для нихрома — 2,2; для хромеля — 2,5. Для полупроводниковых материалов KT = δρ/(δl), и он намного больше, чем у металлов. Например, для германия KT ≈ 100. Однако полупроводниковые материалы характеризуются малыми механической прочностью и стабильностью по сравнению с металлами.
В зависимости от материала чувствительного элемента тензорезисторы подразделяются на: - проволочные; - фольговые; - полупроводниковые. Проволочные тензодатчики изготавливаются в виде проволоки из нихрома, фехраля, константана диаметром 0,015 – 0.05 мм, которую укладывают частыми петлями на тонкую бумагу или лаковую пленку и приклеивают к ней (рис. 3.6, а). К концам проволоки припаивают или приваривают медные выводы. Сверху преобразователь покрывают лаком. Материал для пленки выбирают в зависимости от условий эксплуатации. Резисторы на пленке из клея БФ-2 работают в диапазоне температур от -40 до 70 °С, а на бакелитовом лаке — до 200 °С. Для более высоких температур используют специальные высокотемпературные клеи или цементы. Тензорезистор наклеивают на поверхность испытуемой детали таким образом, чтобы его продольная ось была расположена в направлении измеряемой деформации, т.е. чтобы возможные деформации детали происходили вдоль петель резистора. Это позволяет точнее измерять линейные деформации. Поскольку изменение сопротивления тензорезисторов, вызванное деформацией, весьма мало и колеблется от единиц миллиом до нескольких десятых долей Ома, то для измерений применяют высокочувствительные потенциометрические и мостовые схемы. Чтобы повысить чувствительность тензорезисторов, их можно включать в два и даже четыре плеча мостовой схемы.
где S — площадь сечения проволоки. Отклонение от линейности характеристики не превышает 0,1 %. Чувствительность проволочного тензорезистора:
Достоинства: · простые по конструкции; · дешевые; · имеют линейную статическую характеристику; · малый вес; Недостатки: · низкая чувствительность; · подвержены влиянию влаги и температуры; Фольговые тензодатчики (рис. 3.6, б) более совершенны, чем проволочные тензорезисторы. Они имеют решетку из тонких полосок фольги прямоугольного сечения толщиной 4... 12 мкм, полученную травлением и нанесенную на лаковую подложку. Благодаря большей площади контакта полосок фольгового тензорезистора с объектом измерения его теплоотдача значительно выше, чем у проволочного, что позволяет увеличить ток, протекающий через резистор, до 0,5 А, и тем самым повысить чувствительность тензопреоб-разователя. Другое достоинство фольговых тензорезисторов заключается в возможности изготовления решеток сложного профиля, которые наиболее полно удовлетворяют условиям измерений. Достоинства: · высокая чувствительность; · высокая точность; · хороший механический контакт; · возможность пропустить большой ток.
Рисунок 3.6 Тензорезисторы: а- проволочные; б- фольговые. Полупроводниковые тензометрические датчики изготавливаются из германия, кремния, галия и т.п. В этих датчиках при изменении сопротивления изменяется их удельная проводимость. Полупроводниковые тензорезисторы имеют ряд существенных преимуществ: их чувствительность в 50...60 раз превышает чувствительность проволочных, размеры существенно меньше, уровень выходного сигнала в ряде случаев достаточен для использования без сложных и дорогих усилителей. Основным их отличием от проволочных является большое (до 50 %) изменение сопротивления тензопреобразователя при деформации. Достоинства: · высокая чувствительность; · большая мощность выходного сигнала. Недостатки: · большой разброс параметров (трудно сделать датчики с одинаковыми параметрами); · малые механическую прочность и гибкость. Все тензометрические датчики помещены в специальные пакеты, чаще из бумаги и во время опыта приклеиваются на испытуемый образец. Такие датчики обладают одним общим недостатком - одноразовые, т.к. после растяжения или сжатия не возвращают прежние характеристики. Применение: - для контроля за деформациями и напряжениями при статических и динамических нагрузках; - для измерения крутящих и изгибающих моментов, возникающих на поверхности механизмов при их механической нагрузке. Погрешности тензорезисторов могут быть вызваны изменениями температуры, недостаточными сопротивлением изоляции и влагостойкостью, качеством наклеивания, наличием поперечной деформации (для наклеиваемых преобразователей). Особенно большие погрешности могут внести изменения температуры и не только из-за ухода параметров материала, но и из-за появления добавочных механических напряжений, вызванных разностью температурных расширений материалов тензорезистора и детали. Тем не менее, применяя дополнительные меры (дополнительную установку нуля перед каждым измерением, калибрование и т.д.), погрешность измерений можно довести до 0,2...0,5 % при статических и до 1... 1,5 % при динамических измерениях. К достоинствам тензорезисторов можно отнести: · незначительную массу, · малые размеры, · простоту конструкции, · возможность измерения статических и динамических процессов; Недостатки: · относительно невысокую чувствительность, · возможность только разового использования (так как он разрушается при отсоединении от детали), · необходимость использования мостовой измерительной схемы и компенсации температурных воздействий.
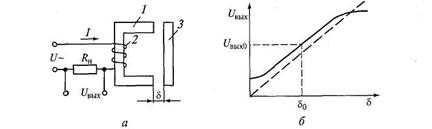
Индуктивные датчики Принцип действия индуктивных датчиков основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником вследствие изменения магнитного сопротивления Rm магнитной цепи датчика, в которую входит сердечник. Индуктивные датчики относятся к классу параметрических. Измеряемое перемещение на входе датчика вызывает изменение параметров магнитной и электрической цепей, что, в свою очередь, вызывает изменение выходной величины — электрического тока I или напряжения U. С помощью индуктивных датчиков можно контролировать механические перемещения, силы, температуру, свойства магнитных материалов, определять наличие дефектов, контролировать диаметр стальной проволоки, толщину немагнитных покрытий на стали и др. Индуктивные датчики отличает ряд достоинств: простота и прочность конструкции, надежность в работе, отсутствие скользящих контактов, большая величина мощности на выходе (до нескольких десятков ватт), высокая чувствительность (до 100 В/мм).
Рисунок 3.7 Схема (а) и характеристика (б) индуктивного преобразователя: 1- сердечник; 2- обмотка; 3- якорь. К достоинствам рассмотренных индуктивных трансформаторных датчиков следует отнести: · достаточно высокую выходную мощность, позволяющую во многих случаях обойтись без усилительных устройств; · высокие чувствительность и разрешающую способность; · сравнительную простоту конструкции; высокую надежность; · малые массу и размеры при расчете на напряжение повышенной частоты; · невысокую стоимость. Недостатками рассмотренных измерительных преобразователей являются: · трудность регулировки и компенсации начального напряжения на их выходе; · необходимость экранирования для уменьшения уровня помех, что обусловливает увеличение размеров и массы; · возможность работы только на переменном токе; · ограниченность диапазона линейной статической характеристики.
Емкостные датчики
где ε — относительная диэлектрическая проницаемость диэлектрика; ε0 — диэлектрическая проницаемость вакуума; S — площадь пластины; δ — толщина диэлектрика или расстояние между пластинами.
Емкостные преобразователи используют для измерения угловых и линейных перемещений, линейных размеров, уровня, усилий, влажности, концентрации и др. Конструктивно они могут быть выполнены с плоскопараллельными, цилиндрическими, штыревыми электродами, с диэлектриком между пластинами и без него.
где а — ширина пластин конденсатора; X — длина перекрытия электродов.
а) б) в) Рисунок 3.8 Схемы емкостных датчиков с различными измеряемыми параметрами.
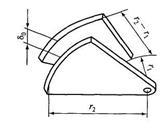
Рисунок 3.9 Емкостной датчик для измерения угловых велечин
Емкостные преобразователи перемещения с переменной площадью перекрытия (рис. 3.9) используют и для измерения угловых величин. В этом случае емкость измерительного преобразователя:
(3.2)
а чувствительность:
(3.3)
где r2, r1 — соответственно наружный и внутренний радиусы пластин; φ, φ0 — соответственно текущий (измеряемый) и начальный углы перекрытия пластин.
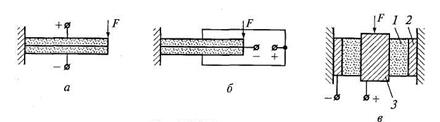
где δ0 — начальный зазор; X — перемещение пластины. В связи с нелинейностью статической характеристики такие датчики применяют для измерения относительно малых перемещений, обычно не более 0,1δ0. Преобразователи с изменяемой диэлектрической проницаемостью среды ε между электродами (см. рис. 3.8, в) широко используют для измерения уровня жидких и сыпучих веществ, анализа состава и концентрации веществ в химической, нефтеперерабатывающей и других областях промышленности, для счета изделий, охранной сигнализации и т.п. Они имеют линейную статическую характеристику. Емкость измерительных преобразователей в зависимости от конструктивных особенностей колеблется от десятых долей до нескольких тысяч пикофарад, что приводит к необходимости использовать для питания датчиков напряжение повышенной частоты — от 1•103 до 108 Гц. Это один из существенных недостатков подобных преобразователей. К достоинствам емкостных измерительных преобразователей можно отнести простоту конструкции, малые размеры и массу, высокую чувствительность, большую разрешающую способность при малом уровне входного сигнала, отсутствие подвижных токосъемных контактов, высокое быстродействие, возможность получения необходимого закона преобразования за счет выбора соответствующих конструктивных параметров, отсутствие влияния выходной цепи на измерительную. Недостатки емкостных измерительных преобразователей состоят в относительно низком уровне выходной мощности сигналов, нестабильности характеристик при изменении параметров окружающей среды, влиянии паразитных емкостей. Пьезоэлектрические датчики Принцип действия пьезоэлектрических преобразователей основан на использовании прямого или обратного пьезоэлектрических эффектов. Прямой пьезоэффект заключается в способности некоторых материалов образовывать электрические заряды на поверхности при приложении механической нагрузки, обратный — в изменении механического напряжения или геометрических размеров образца материала под воздействием электрического поля. В качестве пьезоэлектрических используют обычно естественные материалы — кварц и турмалин, а также искусственно поляризованную керамику на основе титаната бария (BaTiO3), титаната свинца (PbTiO3) и цирконата свинца (PbZrO3). Можно использовать и другие материалы. Количественно пьезоэффект оценивается пьезомодулем — Kd, устанавливающим зависимость между возникающим зарядом Q и приложенной силой F:
Из пьезоматериалов наиболее распространен кварц, что объясняется его удовлетворительными пьезоэлектрическими свойствами, очень высоким сопротивлением, стойкостью к воздействиям температуры и влажности, высокой механической прочностью. Кварц имеет незначительный коэффициент линейного расширения, его пьезомодуль, равный 2,3 · 10-12 Кл/Н, практически не зависит от температуры до 200 °С, в диапазоне 200...500 °С изменяется незначительно, а при 573 °С становится равным нулю; удельное электрическое сопротивление кварца порядка 1016 Ом/м; модуль упругости кварца Е= 7,7 · 1010 Па. Пьезоэлектрический преобразователь давления представляет собой пластину из пьезоматериала. На две ее грани нанесены электроды, с которых снимается заряд или напряжение. Напряжение на обкладках при отсутствии нагрузки:
где Cп — емкость пьезоэлектрического элемента преобразователя, Cп = εSx/a; ε — диэлектрическая постоянная материала пластины; Sx = hb — площадь грани, перпендикулярной к оси X; а — толщина пластины.
Наряду с преобразователями, в которых пьезоэлемент работает на сжатие-растяжение, применяются конструкции, в которых элемент работает на изгиб и сдвиг (рис. 3.10). Преобразователь, работающий на изгиб, представляет собой две одинаковые пластины, склеенные между собой. Между ними располагается металлическая фольга. При изгибе такого элемента одна пластина удлиняется, а другая укорачивается. В зависимости от схемы подключения обкладок можно получить либо сумму напряжений (см. рис. 3.10, а), либо сумму зарядов (см. рис. 3.10, б). Преобразователи, работающие на изгиб, более чувствительны по сравнению с преобразователями, работающими на сжатие. В то же время они уступают последним по прочности и диапазону частот. Преобразователь, работающий на сдвиг, представляет собой кольцо из керамики 1 (см. рис. 3.10, в), в которое вклеен внутренний электрод 3 и которое само вклеено во внешний электрод 2. Под действием силы F происходит деформация сдвига плоскостей, параллельных направлению поляризации. Достоинством такого преобразователя является отсутствие зарядов на электродах при боковых воздействиях на датчик.
Рисунок 3.10 Пъезодатчики: а,б – работающие на изгиб соответственно с суммой напряжений и суммой зарядов, в – работающий на сдвиг; 1- кольцо; 2- внешний электрод; 3- внутренний электрод Напряжение на выходе преобразователя сравнительно мало, поэтому обычно требуется его усилить. Погрешность пьезоэлектрических преобразователей складывается прежде всего из погрешностей от изменения параметров измерительной цепи (емкости Cн), температурной погрешности, вызываемой изменением пьезоэлектрического модуля, погрешности вследствие неправильной установки пластин, погрешности из-за чувствительности к силам, действующим перпендикулярно к измерительной оси преобразователя, и частотной погрешности. К достоинствам пьезоэлектрических преобразователей необходимо отнести простоту конструкции, малые размеры и стоимость, высокую надежность, возможность измерения быстропеременных величин, к недостаткам — невысокую чувствительность, непригодность к измерению статических величин, высокое входное сопротивление измерительной цепи, относительно невысокий уровень выходного сигнала, т.е. необходимость промежуточных усилителей.
Терморезисторы Принцип действия терморезистивных преобразователей основан на свойстве проводников и полупроводников изменять свое электрическое сопротивление при изменении температуры. Для терморезистивных преобразователей используют материалы, обладающие высокой стабильностью ТКС, высокой воспроизводимостью электрического сопротивления при данной температуре, значительным удельным электрическим сопротивлением, высоким ТКС, стабильностью химических и физических свойств при нагревании, инертностью к воздействию исследуемой среды. К таким материалам в первую очередь относятся платина, медь, никель, вольфрам и др. Наиболее широко применяют платиновые и медные терморезисторы. Сопротивление платиновых терморезисторов в диапазоне температур от 0 до 650 °С описывается уравнением:
где RΘ, R0 — сопротивления преобразователя соответственно при рабочей и нулевой температурах; А, В — постоянные коэффициенты. Для платиновой проволоки, применяемой в промышленных терморезисторах, А = 3,96847 · 10-3 K-1; В = -5,847 · 10-7 К-2. В интервале температур от 0 до -200 °С зависимость сопротивления платины от температуры имеет вид:
где C = -4,356 · 10-12K-3. К недостаткам платиновых преобразователей температуры относятся довольно высокая загрязняемость платины парами металлов (особенно железа) при высоких температурах и сравнительно невысокая химическая стойкость в восстановительной среде, вследствие чего материал становится хрупким, теряет стабильность характеристик. Медные терморезистивные преобразователи широко используют в диапазоне температур от 50 до 180 °С вследствие их низкой стоимости и довольно высокой стойкости к коррозии. Зависимость сопротивления меди от температуры описывается линейным уравнением:
где α = 4,26 ·10-3К-1.
К недостаткам медных преобразователей температуры относится высокая окисляемость меди при нагревании, вследствие чего их применяют в сравнительно узком диапазоне температур в средах с низкой влажностью и при отсутствии агрессивных газов. Полупроводниковые терморезисторы отличаются от металлических большими значениями ТКС, а следовательно, меньшими размерами и инерционностью. Температурная зависимость для них описывается выражением
где A, B — постоянные коэффициенты.
Недостатками полупроводниковых терморезисторов, существенно снижающих их эксплуатационные качества, является нелинейность зависимости сопротивления от температуры, значительный разброс номинальных значений сопротивлений различных образцов и их ТКС. Терморезисторы обычно применяют для измерения температуры. При этом нагрузочный ток, проходящий через преобразователь, должен быть мал. Если через терморезистор пропускать большой фиксированный ток, то его перегрев по отношению к окружающей среде может стать значительным. Установившееся значение перегрева и соответственно сопротивления при этом будет определяться условиями теплоотдачи поверхности терморезистора. Если нагретый терморезистор поместить в среду с переменными теплофизическими характеристиками, то появляется возможность измерения ряда физических величин, например скорости потока жидкостей и газов, плотности газов и т. п. Чувств   ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 Коэффициент тензочувствительности связан с деформацией материала и его удельным сопротивлением выражением:
Коэффициент тензочувствительности связан с деформацией материала и его удельным сопротивлением выражением: Характеристика проволочных тензорезисторов в пределах упругой деформации близка к линейной и определяется выражением:
Характеристика проволочных тензорезисторов в пределах упругой деформации близка к линейной и определяется выражением:
 Принцип действия емкостных измерительных преобразователей основан на изменении емкости конденсатора под воздействием входной преобразуемой величины. Емкость конденсатора:
Принцип действия емкостных измерительных преобразователей основан на изменении емкости конденсатора под воздействием входной преобразуемой величины. Емкость конденсатора: Емкостный плоскопараллельный измерительный преобразователь с изменяемой площадью перекрытия S (cм. рис. 3.8, а) описывается уравнением преобразования:
Емкостный плоскопараллельный измерительный преобразователь с изменяемой площадью перекрытия S (cм. рис. 3.8, а) описывается уравнением преобразования:
 Емкостный плоскопараллельный преобразователь перемещения с изменяющимся воздушным зазором (см. рис. 3.8, б) имеет нелинейную характеристику. Изменение его емкости описывается уравнением:
Емкостный плоскопараллельный преобразователь перемещения с изменяющимся воздушным зазором (см. рис. 3.8, б) имеет нелинейную характеристику. Изменение его емкости описывается уравнением: (3.4)
(3.4) (3.5)
(3.5)