
|
|
Получение статических характеристик
Произведем нагрев жидкости объемом 6 литров.
Построим экспериментальную статическую характеристику yэксп(x) на рис. 4.
Найдем параметры a, b для линейной модели (3), решив систему уравнений (4) используя возможности Matlab:
A=[6,3720; 3720,3182400]; B=[489.3; 343992]; X=A\B X = 52.7964 0.0464
Решение системы уравнений: a=52,7964; b=0,0464.
Получим линейную модель нагрева воды: y =52,7964+0,0464 x Построим график линейной модели yлин мод(x) на рис. 4. Найдем параметры a, b, c для нелинейной (квадратическая интерполяция) модели (5), решив систему (6) используя систему Matlab:
A=[6,3720,3182400; 3720,3182400,3112128000; 3182400,3112128000, 3.2482944e12]; B=[489.3; 343992; 177779520]; X=A\B; X = 36.1505; 0.1249; -0.00006. Решение системы уравнений: a=36,1505; b=0,1249; c= -6,036×10-5. Получаем модель нагрева воды:
Построим график нелинейной модели yнелин. мод.(x) на рис.4.
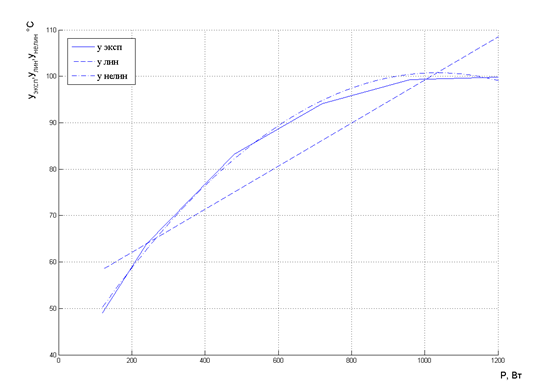
yэксп(x) – статическая характеристика, построенная по экспериментальным данным. yлин (x) – статическая характеристика, построенная по линейной модели объекта. yнелин (x) – статическая характеристика, построенная по нелинейной модели объекта °C. Таблица 2. Исходные данные, модели и погрешности
Вывод: экспериментальным методом было произведено исследование зависимости между выходной и входной переменными объекта управления в статических режимах. Были получены следующие модели: линейная – y =52,7964+0,0464 x нелинейная –y=36,1505+0,1249x–6,036×10-5×x2 Нелинейная модель описывает объект точнее, чем линейная, так как максимальная абсолютная погрешность между моделью и экспериментальными данными в случае нелинейной модели(∆ y= 1,2693°C) меньше таковой в случае линейной модели (∆ y= 9,3644°C).
Определение динамических характеристик объекта управления
Ознакомимся с методами определения динамических характеристик по экспериментальным данным.
Общие теоретические сведения
Динамические характеристики определяют связь между входными и выходными переменными в динамических режимах. В теории автоматического управления используют следующие динамические характеристики:
1. Дифференциальные и интегральные уравнения; 2. Передаточные функции; 3. Частотные характеристики; 4. Временные характеристики.
Дифференциальные уравнения.
Используют следующие формы записи дифференциальных уравнений: 1) «Вход-выход»:
- дифференциальное уравнение n-го порядка. Объект стационарный, так как его параметры ai и b не зависят от времени.
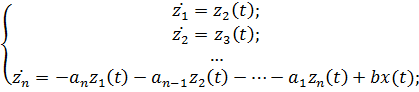
2) Каноническая (нормальная) форма записи дифференциального уравнения (в пространстве состояний): дифференциальное уравнение n-го порядка в нормальной форме имеет вид:
zi – переменная состояния (фазовая координата), при этом 3) Векторно-матричная форма:
где A и B – матрицы параметров.
z – вектор-столбец фазовых координат размерностью n, A – матрица параметров размерности n*n, B – матрица параметров размерности n*m (m – размерность входа x).
Для дифференциального уравнения 2-го порядка:
4) Дифференциально-разностная (дискретная) форма. При расчете динамических режимов на ЭВМ и микропроцессорных системах управления используется дискретная форма записи.
Δt – шаг дискретизации по времени, z(i), x(i) – значения вектора z и входа x на i-м шаге, F, G –матрицы размерностей n*n и n*m соответственно, зависящие от Δt. Предполагается, что в пределах шага Δt значение входа x не изменяется.
Передаточная функция
Передаточной функцией W(p) называется отношение выходного сигнала y(p) к входному x(p), преобразованных по Лапласу:
где p – параметр преобразования Лапласа. Передаточная функция полностью характеризует динамические свойства системы. Зная передаточную функцию можно определить переходный процесс на выходе системы. Переход из одного класса функций в другой позволяет оперировать вместо дифференциальных уравнений оперировать алгебраическими.
Частотные характеристики
Амплитудно-фазовой частотной характеристикой системы (частотной передаточной функцией) W(jω) называется отношение выходного сигнала y(jω) ко входному x(jω), преобразованных по Фурье:
где ω – круговая частота. W(jω) представляет собой комплексное число и может записываться в двух формах: 1) через амплитуду и фазу:
где M(ω) – амплитудно-частотная характеристика (АЧХ) – зависимость отношения амплитуды выходного сигнала к амплитуде входного от частоты. φ(ω) – фазо-частотная характеристика (ФЧХ) – зависимость отношения фазы выходного сигнала к фазе входного от частоты. 2) в виде суммы действительной и мнимой частей:
где R(ω) – действительная часть, V(ω) – мнимая часть, j – мнимая единица. Для перехода от одного вида к другому используются формулы:
Временные характеристики
К временным характеристикам относятся переходная функция (кривая разгона) и импульсная переходная характеристика (весовая функция). Временные характеристики представляют собой реакцию системы на типовые апериодические воздействия.
Временные характеристики широко применяются на практике, так как их можно легко получить практически.
Типовые входные воздействия: 1) Единичная ступенчатая функция 1(t):

Ступенчатая функция:

Дельта-функция δ(t) (единичная импульсная функция):

2) Прямоугольный импульс.
Переходная функция Переходная функция (кривая разгона) h(t) – реакция системы на единичное ступенчатое воздействие.
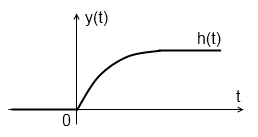

Если x=N·1(t), то y=N·h(t). Зависимость изменения выходной величины системы от времени, вызванная единичным входным ступенчатым воздействием при условии, что до момента приложения этого воздействия система находилась в покое, называется кривой разгона. Кривая разгона обычно имеет размерность, равную отношению размерностей выходной и входной величин системы. Для теоретического расчета кривой разгона надо решить дифференциальное уравнение системы, подставив в качестве входного воздействия единичную ступенчатую функцию.
Весовая функция. Импульсная переходная характеристика (весовая функция) W(t) – реакция системы на дельта-функцию.
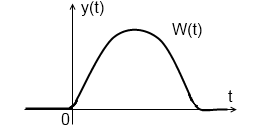

Так как Весовую функцию можно получить теоретически, решая дифференциальное уравнение системы, в котором в качестве входного воздействия рассматривается дельта-функция. Зная переходную функцию, весовую функцию получают обратным преобразованием Лапласа   Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|


 .
. (7)
(7)
 и так далее.
и так далее.
















