
|
|
История автоматического управленияСтр 1 из 3Следующая ⇒ Введение Лекционный курс по дисциплине «Автоматика» ставит своей целью ознакомление студентов факультета электрификации сельского хозяйства, обучающихся по направлению 110300 «Агроинженерия» специальности 110302 – «Электрификация и автоматизация сельского хозяйства», с общими принципами построения систем автоматического управления (САУ), с процессами, протекающими в них, методами их исследования, а также с техническими средствами автоматики и телемеханики используемыми в различных технологических операциях при производстве и переработке сельскохозяйственной продукции. Автоматика – это отрасль науки и техники, которая охватывает теорию автоматического управления (ТАУ), а так же принципы построения автоматических систем и технические средства для их реализации. Из определения видно, что дисциплина «Автоматика» состоит из двух основных частей: теории автоматического управления и технических средств построения систем автоматического управления. Теория автоматического управления – это наука о принципах построения автоматических систем и закономерностях протекающих в них процессов. Современные методы ТАУ позволяют выбрать рациональную структуру системы, определить оптимальные значения параметров с учётом регулярных и случайных воздействий, оценить устойчивость и показатели качества процессов управления (точность, быстродействие, статическую ошибку и др.). Автоматизация – применение технических средств экономически - математических методов и систем управления, освобождающих человека частично или полностью от непосредственного участия в процессах получения, преобразования, передачи и использования энергии, материалов или информации. В зависимости от функций, выполняемых специальными автоматическими устройствами, различают следующие виды автоматизации: 1. Автоматический контроль, в состав которого входят: автоматическая сигнализация, автоматические измерения, автоматическая сортировка, автоматический сбор информации; 2. Автоматическая защита, в состав которой входят: релейная защита, автоблокировка; 3. Дистанционное управление, в состав которого входят: дистанционное управление, телемеханика; 4. Автоматическое регулирование и автоматическое управление (САУ, САР); 5. Автоматизированное управление (автоматизированные системы управления технологическими процессами, системы автоматизированного проектирования, автоматизированные системы сбора экономической информации) это управление, которое осуществляется совместными действиями технических устройств (вычислительных комплексов) и человека. По уровню автоматизации различают: а) частичную автоматизацию; б) комплексную автоматизацию; в) полную автоматизацию. Сельскохозяйственному производству присущи специфические особенности, которые следует учитывать при разработке автоматизированных систем и внедрении средств автоматизации в различные процессы агропромышленного комплекса. К таким характерным отличиям следует отнести: а) цикличный, прерывистый характер производства сельскохозяйственной продукции; б) невозможность сбоев при выращивании растениеводческой и животноводческой продукции; в) надежность используемых средств автоматики; г) невозможность увеличить выход продукции, значительно уменьшив время и число циклов технологических процессов; д) наличие вибраций в мобильной технике; е) наличие большого количества объектов с агрессивными, влажными и запыленными средами; ж) рассосредоточенность сельскохозяйственных машин и установок по огромным площадям, а так же удаленность от ремонтной базы.
I. ОБЩИЕ СВЕДЕНИЯ О СИСТЕМАХ И ЭЛЕМЕНТАХ АВТОМАТИКИ Основные понятия, определения и терминологии автоматики
Любой технологический процесс характеризуется физическими величинами, которые принято называть показателями процесса. Для одних процессов показатели могут быть постоянными, для других допускается их изменение в заданных пределах по определенному закону. Совокупность предписаний, ведущих к правильному выполнению технологического процесса в каком – либо устройстве или ряде устройств (системе), выполняющих один и тот же технологический процесс, называется алгоритмом (законом) функционирования устройства (системы). Устройство или совокупность устройств, осуществляющих тот или иной технологический процесс, которые нуждаются в оказании специально организованных командах извне для выполнения его алгоритма функционирование, называется управляемым объектом или объектом управления (ОУ). Каждый объект управления имеет устройство, называемое управляющим органом, при изменении состояния которого показатели процесса будут изменяться в заданных пределах или в заданном направлении. Через управляющий орган в объект управления поступают воздействия, которые позволяют реализовать заданный (заранее предписанный) алгоритм функционирование. Совокупность предписаний, определяющая характер воздействий извне на объект управления с целью выполнения им заданного алгоритма функционирования, называется алгоритмом управления. Физические показатели объекта, которые преднамеренно изменяются или сохраняются неизменными в процессе управления, называют управляемыми (регулируемыми) величинами или координатами. Обычно управляемые величины в объекте управления характеризуют качественные показатели процесса. Поэтому управлять объектом – это, значит, создавать условия, при которых качественные показатели изменялись бы по требуемому закону с определенной точностью, независимо от действия на объект внешних условий. Управлением называется преднамеренное воздействие на объект, обеспечивающее достижение определенных самим технологическим процессом целей. Если управление осуществляется без непосредственного участия человека, то оно называется автоматическим, а если с участием то – ручным. Автоматическим управляющим устройством (АУУ) называют техническое устройство, осуществляющее воздействие на объект управления в соответствии с заложенным в нем алгоритмом управления. Автоматическое управляющее устройство воздействует на объект управления через орган управления. Совокупность объекта управления и автоматического управляющего устройства, которые взаимодействуют между собой в соответствии с алгоритмом управления, называется системой автоматической управления (САУ) (рис. 1). Следует заметить, что система – это не механический набор, а совокупность взаимодействующих между собой элементов. Из всех операций управления различными технологическими процессами, объединенных определением автоматической системы управления, наибольший интерес для практических целей представляют операции по поддержанию или изменению показателей процесса. Эти операции получили название регулирование. Техническое устройство, предназначенное для автоматического поддержания постоянного значения показателей процесса регулирования или изменение этих показателей по какому – либо требуемому закону, называют автоматическим регулятором. Сочетание объекта регулирование с автоматическим регулятором называют автоматической системой регулирования (САР) (рис. 1).
Рис.1.1 Структурная схема системы автоматического управления (регулирования) с отрицательной обратной связью. На рисунке показаны следующие элементы: ЗАФ – задатчик алгоритма функционирования (источник информации о задачах управления); АУУ (АР) – автоматическое управляющее устройство (автоматический регулятор) (совместно с элементом сравнения (ЭС) - устройство для обработки информации); У – усилитель; ИМ – исполнительный механизм; ОУ – объект управления; Д – датчик (источник информации о результатах управления) Основными свойствами любой системы, в том числе и автоматической, являются: целостность, связность, сложность, организованность. Рис.1.3 Структурная схема системы автоматического управления с обратной связью (в случае отрицательной обратной связи сектор элемента сравнения, на который подаётся сигнал с выхода ОУ через Д, зачерняется (а), а при положительной обратной связи – нет (б))
Размыкание главной обратной связи, превращает систему замкнутого цикла функционирования в разомкнутую, а при размыкании же местной обратной связи, замкнутая система будет продолжать работать по замкнутому циклу.
Рис.1.7. Пример системы замкнутого регулирования скорости вращения двигателя постоянного тока (ДПТ) с независимым возбуждением
На рисунке 1.7 приведена схема управления угловой скоростью ω вала двигателя М постоянного тока, в которой выход системы посредством тахогенератора BR, реостата R2, усилителя У и двигателя М2 привода ползунка реостата R1 соединён с входом системы. Эта система определяет автоматический контроль угловой скорости ω вала двигателя. Напряжение тахогенератора UBR, пропорциональное скорости вращения, всё время сравнивает с постоянным значением напряжения U0, и разность между ними в виде E=U0-UBR через усилитель У подаётся на двигатель М2. Любое изменение угловой скорости ω приведёт к появлению сигнала на двигателе М2, который переместит ползунок реостата R2 в ту ил другую сторону, в результате чего при уменьшении или увеличении угловой скорости двигателя М по какой-либо причине ток в обмотке возбуждения L1 генератора G увеличивается или уменьшается, что приведёт к соответствующему изменению напряжения генератора, а следовательно, и к возвращению управляемой величины к заданному значению.
А) б) Рис.1.8. В зависимости от вида статических характеристик САУ может быть: а) – линейной системой; б) – нелинейной системой
5. По числу управляемых величин различают системы автоматического управления: а) одномерные; б) двумерные; в) многомерные. 6. По принципу действия: 6.1. Системы прямого действия, когда чувствительный элемент действует непосредственно на управляющий орган. Эти системы имеют низкую точность воспроизведения заданной (предписанной) величины. 6.2. Системы непрямого действия, когда после чувствительного элемента устанавливаются усилители мощности и сервоприводы, действующие на регулируемые (управляемые) органы объекта управления. В этом случае повышается точность и качество процесса регулирования. 7. По виду зависимости между управляемой величиной и нагрузкой на объект управления: 7.1. Статическая система - это система, в которой при возмущающем или задающем воздействии, стремящемся к постоянной величине, отклонение управляемой величины так же стремится к постоянной величине, зависящей от этого воздействия. Для реализации такого управления используется статический регулятор, которые работают с некоторым отклонением - статической ошибкой. Относительное значение статической ошибки может быть определено по формуле:
Рис.1.9. Пример статической системы автоматического управления и статической характеристики этой системы
7.2. Астатическая система - это система, в которой отклонение управляемой величины в установившемся режиме при любом постоянном значении возмущающего (задающего) воздействия равно нулю.
Рис.1.10. Пример астатической системы автоматического управления и статической характеристики этой системы
Основные законы управления
Под законом управления в теории автоматического управления понимают математическую зависимость, по которой автоматическое управляющее устройство или автоматический регулятор воздействуют на объект управления. На вход управляющего устройства поступает сигнал сравнения или рассогласования ε(t), а на выходе формируется сигнал управления (управляющее воздействие) u(t):
По виду математической зависимости между входной 1) пропорциональный закон управления (П-закон)
где kр – коэффициент передачи (пропорциональности) П-регулятора
П-закон управления – это такой закон управления, при котором величина выходного сигнала u(t) пропорциональная величине управляющего сигнала ε(t). В этом случае коэффициент пропорциональности называется коэффициентом усиления или передачи. 2) интегральный закон управления (И-закон) – это закон управления, в котором выходная величина u(t) пропорциональная интегралу от задающего воздействия ε(t):
где
Регуляторы, осуществляющие такой закон управления называются И-регуляторами. 3) пропорционально-интегральный закон управления (ПИ-закон) – является комбинацией П и И – законов регулирования.
Регуляторы, осуществляющие такой закон управления называются ПИ-регуляторами. 4) пропорционально-интегрально-дифференциальный закон управления (ПИД-закон)
где
Сравнительная оценка законов регулирования:
Рис.1.10. Сравнительная оценка реализации автоматическими регуляторами непрерывных законов управления. На рисунке показано:
Помимо непрерывных законов управления существует дискретный закон управления (релейный закон) который не имеет математической связи между входным и выходным воздействием. При расчете таких регуляторов пользуются графо-аналитическими методами.
Рис.1.11. Динамические характеристики позиционного (релейного) регулятора: y0 – заданное (предписанное) значение управляемой величины; 2а – зона нечувствительности (неоднозначности) релейного регулятора
Рис.1.12. Условное обозначение элементов сравнения на структурных и структурно-алгоритмических схемах автоматики
Результатом такого сопоставления является сигнал рассогласования ε(p):
В самостоятельном виде эти элементы не встречаются, т.к. они входят в состав автоматических регуляторов. 3) усилители – устройства, предназначенные для усиления мощности слаботочного управляющего сигнала с целью воздействия на автоматический регулятор или исполнительный механизм; 4) исполнительный механизм – устройство, предназначенное для отработки алгоритма функционирования задаваемого задатчиком алгоритма функционирования; 5) задающие элементы (элементы настройки) – потенциометры, вращающиеся трансформаторы и т.д.; 6) корректирующие элементы – устройства, предназначенные для улучшения регулировочных свойств системы в целом или отдельных ее частей (дифференцирующие, интегрирующие цепи; нелинейные элементы и т.д.); 7) командо-аппараты – устройства, предназначенные для подачи в систему различных воздействий и команд (кнопки, выключатели и др.); 8) элементы защиты – устройства, предназначенные для выполнения защитных функций (предохранители, автоматы и т.д.); 9) контрольно-измерительная аппаратура – устройства, предназначенные для получения информации о состоянии контролируемого параметра или ОУ и предоставления их в визуальной форме удобной для восприятия человека.
Рис.1.13. Статические характеристики: 1 – линейных элементов; 2 – нелинейных элементов Динамическая характеристика – зависимость выходного значения от времени при неизменном задающем входном сигнале Каждому значению задающего воздействия соответствует своя кривая переходного процесса y(t).
Рис.1.14. ……………………………………………………………
Передаточный коэффициент (коэффициент усиления, коэффициент передачи) – показывает во сколько раз изменяется величина входного сигнала при прохождении через элемент автоматики. Определяется по статической характеристике элемента.
Рис.1.15. ………………………………………………………….
Динамический коэффициент передачи – чувствительность элемента. Погрешность – разница между фактическим и номинальным значением контролируемого параметра. Возникает из-за изменения внутренних свойств элемента (износ). Порог чувствительности – наименьшее изменение входного сигнала, при котором выходной сигнал начинает тоже изменяться.
Типовые входные воздействия
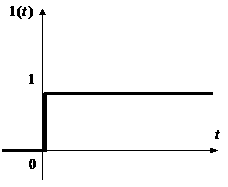
Анализ работы элемента и системы в целом можно выполнить, анализируя зависимость 1) считать начальные условия нулевыми; 2) чтобы входное воздействие описывалось с точки зрения математики и одновременно с этим моделировать сложные эксплуатационные режимы. С этой точки зрения решено использовать три вида входных типовых воздействий: а) единичное ступенчатое воздействие; б) единичное импульсное воздействие; в) гармоническое воздействие. 1) единичное ступенчатое воздействие которое описывается единичной ступенчатой функцией: 1.1.
1.2.
1.3.
1.4. выключение с задержкой
2) единичное импульсное воздействие, которое описывается при помощи единичной импульсной функции или дельта функция Дирака (
Свойства 1. 2. 3) гармоническое воздействие, которое обычно описывается гармонической функцией синуса, т.е. на вход подается
Временные характеристики
Временные характеристики представляют собой реакцию звена или системы на единичное ступенчатое воздействие или единичное импульсное воздействие.
Переходная функция
Реакция звена или системы на единичное ступенчатое воздействие при нулевых начальных условиях называется переходной функцией и обозначается как h(t). Переходную функцию можно найти, используя обратное преобразование Лапласа:
Графическое изображение переходной функции называют переходной характеристикой.
Рис.1.17. ………………………………………………………….
Функция веса
Реакция звена или системы на единичный импульс (или воздействие) при нулевых начальных условиях называется весовой функцией (функцией веса) и обозначается w(t). Весовую функцию можно найти, используя следующее преобразование Лапласа или используя:
Графическое изображение весовой функции называется переходной импульсной характеристикой. Общие виды переходных импульсных характеристик:
Рис.1.17. ………………………………………………………….
Частотные характеристики
К частотным характеристикам относят различные реакции звена или системы на гармонические воздействия. Основными характеристиками являются: амплитудо-частотная характеристика (АЧХ), фазо-частотная характеристика (ФЧХ), амплитудо-фазо частотная характеристика (АФЧХ) или амплитудо-фазовая характеристика (АФХ). АЧХ – зависимость отношения амплитуды выходного сигнала к амплитуде входного сигнала от частоты:
Разность фазы выходного сигнала и входного в зависимости от частоты называется ФЧХ звена или системы.
Если в ОДУ описывающее работу звена или системы вместо оператора Лапласа
Если взять отношение
Существует взаимосвязь между частотными характеристиками:
Если задаваться изменением частоты Вид частотных характеристик:
Рис.1.17. ………………………………………………………….
Анализ типовых звеньев
В автоматике различают группы типовых динамических звеньев. Этих групп три: 1) простейшие (пропорциональное звено, интегрирующее, дифференцирующее); 2) звенья первого и второго порядка (апериодическое звено первого порядка, колебательное звено, апериодическое звено второго порядка, консервативное звено); 3) трансцендентные звенья (звено транспортного запаздывания). Анализ каждого типового звена автоматики проводится в соответствии со следующим алгоритмом: 1. определение звена; 2. дифференциальное уравнение звена и его алгебраический аналог; 3. примеры звеньев; 4. передаточная функция звена; 5. переходная и весовая функции; 6. переходная и переходная импульсная характеристики; 7. аналитическое выражение частотной характеристики; 8. вид частотной характеристики; 9. логарифмическая частотная характеристика звена.
Пропорциональное звено
Это звено также называется усилительным, безынерционным. Пропорциональным называется звено, которое описывается следующим дифференциальным уравнением:
где k – коэффициент усиления (пропорциональности) звена Примеры безынерционных звеньев:
3) механическая передача
Безинерционным обычно считают такой элемент, в системе которого на целый порядок имеет ниже инерционность, чем другие элементы системы. Передаточная функция:
Переходная функция:
где
Функция веса:
Временные характеристики: АФЧХ
Рис.1.17. ………………………………………………………….
АЧХ 3) ФЧХ
Рис.1.17. ………………………………………………………….
ЛАЧХ
Рис.1.17. ………………………………………………………….
Интегрирующее звено Интегрирующим называется такое звено автоматики, которое может быть описано следующим дифференциальным уравнением:
Это уравнение может быть переписано в следующем виде:
Примеры интегральных звеньев: Пример № 1: заполнение сосуда жидкостью
Пример № 2: двигатель постоянного тока
Передаточная функция:
Переходная функция:
Весовая функция:
Временные характеристики: АФЧХ
Рис.1.17. ………………………………………………………….
АЧХ 3) ФЧХ
Рис.1.17. ………………………………………………………….
АФЧХ
Рис.1.17. ………………………………………………………….
АЧХ
Рис.1.17. ………………………………………………………….
ФЧХ
Рис.1.17. ………………………………………………………….
Логарифмические характеристики:
Вид асимптотической АЧХ:
Рис.1.17. ………………………………………………………….
АФЧХ
Рис.1.17. ………………………………………………………….
АЧХ
Рис.1.17. ………………………………………………………….
ФЧХ
Рис.1.17. ………………………………………………………….
Логарифмические характеристики:
Асимптотическая ЛАЧХ:
Рис.1.17. ………………………………………………………….
АФЧХ
Рис.1.17. ………………………………………………………….
АЧХ
Рис.1.17. ………………………………………………………….
ФЧХ
Рис.1.17. ………………………………………………………….
Введение Лекционный курс по дисциплине «Автоматика» ставит своей целью ознакомление студентов факультета электрификации сельского хозяйства, обучающихся по направлению 110300 «Агроинженерия» специальности 110302 – «Электрификация и автоматизация сельского хозяйства», с общими принципами построения систем автоматического управления (САУ), с процессами, протекающими в них, методами их исследования, а также с техническими средствами автоматики и телемеханики используемыми в различных технологических операциях при производстве и переработке сельскохозяйственной продукции. Автоматика – это отрасль науки и техники, которая охватывает теорию автоматического управления (ТАУ), а так же принципы построения автоматических систем и технические средства для их реализации. Из определения видно, что дисциплина «Автоматика» состоит из двух основных частей: теории автоматического управления и технических средств построения систем автоматического управления. Теория автоматического управления – это наука о принципах построения автоматических систем и закономерностях протекающих в них процессов. Современные методы ТАУ позволяют выбрать рациональную структуру системы, определить оптимальные значения параметров с учётом регулярных и случайных воздействий, оценить устойчивость и показатели качества процессов управления (точность, быстродействие, статическую ошибку и др.). Автоматизация – применение технических средств экономически - математических методов и систем управления, освобождающих человека частично или полностью от непосредственного участия в процессах получения, преобразования, передачи и использования энергии, материалов или информации. В зависимости от функций, выполняемых специальными автоматическими устройствами, различают следующие виды автоматизации: 1. Автоматический контроль, в состав которого входят: автоматическая сигнализация, автоматические измерения, автоматическая сортировка, автоматический сбор информации; 2. Автоматическая защита, в состав которой входят: релейная защита, автоблокировка; 3. Дистанционное управление, в состав которого входят: дистанционное управление, телемеханика; 4. Автоматическое регулирование и автоматическое управление (САУ, САР); 5. Автоматизированное управление (автоматизированные системы управления технологическими процессами, системы автоматизированного проектирования, автоматизированные системы сбора экономической информации) это управление, которое осуществляется совместными действиями технических устройств (вычислительных комплексов) и человека. По уровню автоматизации различают: а) частичную автоматизацию; б) комплексную автоматизацию; в) полную автоматизацию. Сельскохозяйственному производству присущи специфические особенности, которые следует учитывать при разработке автоматизированных систем и внедрении средств автоматизации в различные процессы агропромышленного комплекса. К таким характерным отличиям следует отнести: а) цикличный, прерывистый характер производства сельскохозяйственной продукции; б) невозможность сбоев при выращивании растениеводческой и животноводческой продукции; в) надежность используемых средств автоматики; г) невозможность увеличить выход продукции, значительно уменьшив время и число циклов технологических процессов; д) наличие вибраций в мобильной технике; е) наличие большого количества объектов с агрессивными, влажными и запыленными средами; ж) рассосредоточенность сельскохозяйственных машин и установок по огромным площадям, а так же удаленность от ремонтной базы.
История автоматического управления
Впервые с необходимостью построения регуляторов столкнулись создатели сложных механизмов и высокоточных устройств, в первую очередь – дозаторов, часов. Во втором веке до нашей эры арабы снабдили поплавковым регулятором уровня водяные часы, чтобы обеспечить постоянную скорость истечения воды. А в 1657 году для похожих целей Гюйгенс встроил в механические часы маятниковый регулятор хода. Герон Александрийский, живший в первом столетии нашей эры, написал книгу под названием «Пневматика», в которой он привёл несколько чертежей поплавковых регуляторов уровня воды. Голландский механик и химик К. Дреббель (1572…1633 г.) изобрёл регулятор температуры, который использовал в своих химических опытах и в инкубаторах для выведения цыплят. Этот регулятор содержал устройство, позволяющее выпускать нагретый воздух из камеры, когда температура в ней достигала желаемого результата. Система управления, собранная на основе этого регулятора, считается первой системой с обратной связью, изобретённая в Европе. Развитие промышленных регуляторов началось лишь на рубеже XVIII и XIX столетий, в эпоху промышленного переворота в Европе. Первыми промышленными регуляторами этого периода являются автоматический поплавковый регулятор питания котла паровой машины, использованный в 1765 году И.И. Ползуновым, и центробежный регулятор скорости паровой машины, на который в 1784 году получил патент Дж. Уатт. Тем самым был открыт фундаментальный принцип управления – принцип обратной связи (принцип Ползунова-Уатта). Первые публикации по исследованию регуляторов появляются в двадцатых – тридцатых годах XIX века, так Д.С. Чижов опубликовал один из первых трудов в этом направлении в 1823 году. В 1830 г. Понселе предложил построить регулятор, действие которого было направлено на компенсацию изменения нормального функционирования системы от возмущения. Принцип По   Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 (1.1)
(1.1) а) б)
а) б)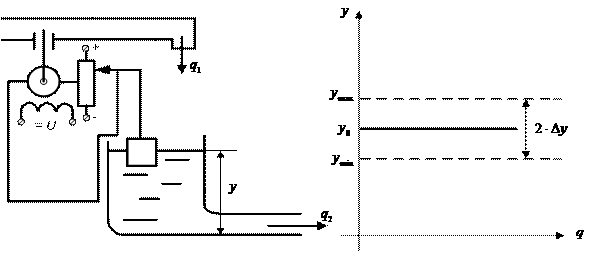 а) б)
а) б)
 и выходной величиной u(t) управляющего устройства непрерывные законы управления делятся:
и выходной величиной u(t) управляющего устройства непрерывные законы управления делятся: (1.2)
(1.2) (1.3)
(1.3) - постоянная времени интегрирования И-регулятора; kр – коэффициент передачи (пропорциональности) И-регулятора
- постоянная времени интегрирования И-регулятора; kр – коэффициент передачи (пропорциональности) И-регулятора (1.4)
(1.4) (1.5)
(1.5) - постоянная времени дифференцирования
- постоянная времени дифференцирования
 - начальное значение управляемой величины;
- начальное значение управляемой величины;  - требуемое значение управляемой величины. Также показано: 1 – система с самовыравниванием без автоматического регулятора; 2 – система с П-регулятором; 3 – система с ПИ-регулятором; 4 – система с ПИД-регулятором
- требуемое значение управляемой величины. Также показано: 1 – система с самовыравниванием без автоматического регулятора; 2 – система с П-регулятором; 3 – система с ПИ-регулятором; 4 – система с ПИД-регулятором
 (1.6)
(1.6)
 (1.7)
(1.7) (1.8)
(1.8)
 включение
включение (1.20)
(1.20) выключение
выключение включение с задержкой
включение с задержкой
 -функция), которая представляет собой математическую идеализацию импульса длительностью равной нулю, амплитудой равной бесконечности и площадью равной единице:
-функция), которая представляет собой математическую идеализацию импульса длительностью равной нулю, амплитудой равной бесконечности и площадью равной единице: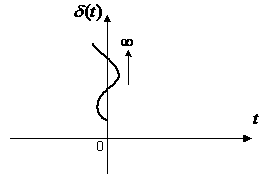
 (1.26)
(1.26) .
.
 (1.28)
(1.28)
 подставить
подставить  , а затем представить выражение в показательной форме, то проведя соответствующее упрощение можно получить следующую запись:
, а затем представить выражение в показательной форме, то проведя соответствующее упрощение можно получить следующую запись: (1.33)
(1.33) от
от  до
до  очертит на комплексной плоскости некую кривую называемую частотным годографом или АФЧХ (АФХ) звена или системы.
очертит на комплексной плоскости некую кривую называемую частотным годографом или АФЧХ (АФХ) звена или системы.

 1) усилитель
1) усилитель 2) делитель напряжения
2) делитель напряжения
 ()
() , ()
, () - единичное входное воздействие
- единичное входное воздействие ()
()



 ()
()


 Пример № 3: зарядка емкости
Пример № 3: зарядка емкости
 ()
()



 ()
()