|
|
Глава 3.Построение переходного процесса на ЭВМ ⇐ ПредыдущаяСтр 2 из 2 Существуют три группы методов построения переходных процессов: аналитические; графические, использующие частотные и переходные характеристики; построение переходных процессов с помощью ЭВМ. В наиболее сложных случаях используются ЭВМ, которые позволяют кроме моделирования САУ, подключать к машине отдельные части реальной системы, т.е. близки к экспериментальному методу. Первые две группы используются в основном в случае простых систем, а также на этапе предварительного исследования при существенном упрощении системы.
где P(ω) - вещественная частотная характеристика замкнутой системы; Q(ω) - мнимая частотная характеристика замкнутой системы, т.е. Фg(jω)=P(ω)+jQ(ω).
где: ωрi и ωсрi - соответственно частота равномерного пропускания и частота среза каждой трапеции. 3.1Создание проекта реализующего функциональную схему проекта
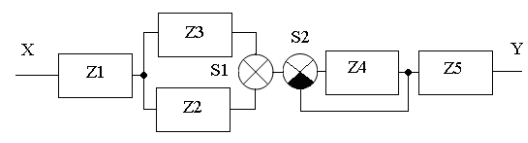
Рис.3.Функциональная схема САР Рассмотрим пример создания проекта реализующий функцию, представленную на рисунке 42 в среде программирования. Последовательность действий можно представить
в следующем виде.
1. В основном окне SIMATIC Manager, показанном на рисунке 18, входим в меню «File» -> «New Project Wizard». 2. Нажимаем кнопку «Next».
3. Выбираем из списка: процессор CPU314, устанавливаем MPI адрес, равный 2, и нажимаем «Next». 4. Устанавливаем язык программирования STL, задаем тип организационного блока OB1 и нажимаем «Next». 5. Вводим имя проекта и нажимаем кнопку «Finish».
6. Переходим на уровень SIMATIC 300 STATION и запускаем программу Hardware двойным щелчком мыши. 7. В появившемся окне в стойке будет один процессор CPU314. Открываем справа библиотеку SIMATIC 300 и помещаем в стойку следующие элементы: блок питания PS 307 2A из папки PS-300; модуль цифрового ввода DI32xDC24V из папки SM-300\DI-300; модуль цифрового вывода DO32xDC24V/05A из папки SM-300\\DO300.
8. Входим в меню «Station» –> «Save and Compile». При отсутствии ошибок в папке блоков появляется объект «System Data». 9. Возвращаемся в SIMATIC Manager и переходим на уровень S7 Program(1) и запускаем редактор символов двойным щелчком на значок Symbols. 10. В окне Symbol Editor вносим в таблицу переменные, показанные в таблице 6.
Сохраняем таблицу.
Таблица 6 - Переменные программы
Заключение. Внедрение на предприятиях сборного железобетона разработанного проекта позволяет повысить скорость приготовления бетонной смеси, исключить ручной труд, обеспечить комфортные условия труда рабочих, обеспечить высокую надежность эксплуатации оборудования. Однако рассмотренные средства и способы автоматизации не позволяют еще в полной мере решить задачу комплексной автоматизации, т. е. добиться такого положения, когда автоматизированы все взаимосвязанные основные участки производственного процесса. Чтобы решить эту задачу необходимо завершить ряд опытно-конструкторских и научно-исследовательских работ по созданию новых совершенных типов автоматизированного технологического оборудования, и новых средств и систем автоматизации.
Список литературы
1. В.А., “Теория систем автоматического регулирования”. - М.: Наука, 1975 2. ЕвдокимовВ.А., “Механизация и автоматизация строительногопроизводства”, 1985; 3. Бауман В.А., “Строительные машины” в 2-х томах, М., 1977; 4. Горинштейн Л.Л., “Основы автоматики и автоматизация производственныхпроцессов”, М., 1985.   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 (6.3)
(6.3)  (6.4)
(6.4)