|
|
Описание функциональной схемы автоматизации дозирования из расходных бункеров цементаСтр 1 из 2Следующая ⇒ Введение
Автоматизация технологического процесса — совокупность методов и средств, предназначенная для реализации системы или систем, позволяющих осуществлять управление самим технологическим процессом без непосредственного участия человека, либо оставления за человеком права принятия наиболее ответственных решений. Как правило, в результате автоматизации технологического процесса создаётся АСУ ТП. Основа автоматизации технологических процессов — это перераспределение материальных, энергетических и информационных потоков в соответствии с принятым критерием управления (оптимальности). Основными целями автоматизации технологического процесса являются: · Повышение эффективности производственного процесса; · Повышение безопасности; · Повышение экологичности; · Повышение экономичности. Цели достигаются посредством решения следующих задач автоматизации технологического процесса: · Улучшение качества регулирования · Повышение коэффициента готовности оборудования · Улучшение эргономики труда операторов процесса · Обеспечение достоверности информации о материальных компонентах, применяемых в производстве (в т.ч. с помощью управления каталогом) · Хранение информации о ходе технологического процесса и аварийных ситуациях Решение задач автоматизации технологического процесса осуществляется при помощи: · внедрения современных методов автоматизации; · внедрения современных средств автоматизации. Автоматизация технологических процессов в рамках одного производственного процесса позволяет организовать основу для внедрения систем управления производством и систем управления предприятием. В связи с различностью подходов различают автоматизацию следующих технологических процессов: · Автоматизация непрерывных технологических процессов; · Автоматизация дискретных технологических процессов; · Автоматизация гибридных технологических процессов. Целью данной курсовой работы является исследование системы автоматического управленияавтоматизация дозирования из расходных бункеров цемента» Для достижения цели были поставлены следующие задачи: · Описание структурного состава САУ(16) · Определение передаточной функции динамической модели модуля · Рассчитать и построить частотные характеристики системы · Проверить САУ на устойчивость
Глава1. Общая часть Структурный состав САУ. Система автоматического управления (САУ)- комплекс устройств, предназначенный для автоматического изменения одного или нескольких параметров объекта управления с целью установления требуемого режима его работы. САУ обеспечивает поддержание постоянства заданных значений регулируемых параметров или их изменение по заданному закону (системы стабилизации, программного управления, следящие системы)либо оптимизирует определенный критерий качества управления. Для осуществления цели управления с учётом особенностей управляемых объектов на них подаются управляющие воздействия, которые предназначены также для компенсации внешних возмущающих воздействий, стремящихся нарушить нормальное функционирование объекта. По типу управления САУ подразделяются на замкнутые, разомкнутые и комбинированные. Основной тип САУ- замкнутые, в которых цепь прохождения сигналов образует замкнутый контур, включающий устройств управления и управляемый объект; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь вне зависимости от причин, вызвавших эта отклонения. Такое управление называется управлением по отклонению. В разомкнутых САУ управление ведётся по жёсткой программе без анализа и учёта факторов в процессе работы управляемого объекта - на устройство управления не поступают сигналы, несущие информацию о текущем состоянии объекта управления, иногда измеряются и компенсируются лишь главные из возмущений (помех). Такое управление называется управлением по возмущению. В комбинированных САУ используются оба эти принципа управления (по отклонению и по возмущению). В САУ сложными техническими или технологическими процессами с большим числом регулируемых параметров широко применяются средства вычислительной техники - микропроцессоры, ЭВМ, управляющие машины.
Рис1. Функциональная схема системы автоматического регулирования. Обозначение через y(t) функцию, описывающую изменение во времени регулируемой величины, т.е. y(t)- регулируемая величина. Через g(t) обозначим функцию, характеризирующую требуемый закон ее изменения. Величину g(t)будем называть задающим воздействием. Тогда основная задача автоматического регулирования сводится к обеспечению равенства y(t)=g)t). Большинства САР решают эту задачу, используя принцип регулирования по отклонению. Функциональная схема такой САР показана на рис.1. Суть принципа регулирования по отклонению состоит в следующем. Регулируемая величина y(t) измеряется с помощью датчика Д и поступает на элемент сравнения ЭС. На этот же элемент сравнения от датчика задания ДЗ поступает задающее воздействие g(t). В ЭС величина g(t) и y(t) сравниваются, т.е. из g(t) вычитается y(t). На выходе ЭС формируется сигнал, равный отклонению регулируемой величины от заданной, т.е. ошибка
Выбор технических средств Принципиальная схема начинается с построения двух одинаковых схем с 20-ю тензодатчиками (В1 – В20). Сигнал поступает на измерительный усилитель DA2, после чего сигналы суммируются, так как датчики установлены на двух опорах. Сумматором является операционный усилитель DA4. реле КT1. транзистор КТЗ16. комплект дозаторов серии АДУБ-1200Ф, состоящий из трех дозаторов для заполнителей типа АВДИ-200Ф,одного дозатора для цемента типа АВДЦ-1200Ф и одного дозатора для жидкостей типа АВДЖ-1200Ф. осветители.
Рисунок 1 -Технологическая схема дозировочного отделения.
концевыми микропереключателями. Работа дозировочного отделения должна проходить в следующей последовательности: 1. Открываются затворы емкостей инертных материалов первых фракций, а также затворы цемента и воды и компоненты начинают поступать в дозаторы; 2. Отвешивание -указывающая стрелка с фотоэлементом дойдет до заданного значения веса, срабатывают соответствующие реле и затворы емкостей закрываются; 3. Открываются затворы инертных материалов, вторых фракций и начинается их отвешивание. Цемент и вода могут отвешиваться как в один, так и в два приема; 4. После окончания отвешивания вторых фракций компоненты выгружаются в бетономешалку. Предварительно должны быть получены данные о готовности мешалки принять материалы. реле классов конечныйвключатель 1 КВК или 2 КВКи возбуждается реле 1РКВК или 2РКВК, замыкая свои контакты в схеме управления дозировочным отделением (см. рисунок 2).
Общие сведения Выключатели конечные серии ВПУ-011 предназначены для применения в электрических цепях управления, сигнализации и контроля относительного положения подвижных частей механизма. Технические характеристики: Номинальный коммутируемый ток -16А Коммутируемое напряжения питания: ~ 660В 50Гц; =400В. Усилие прямого срабатывания выключателей не более 80Н, обратного - 2Н. Рабочий ход привода - 14° Механическая износостойкость - 16 млн. циклов Коммутационная износостойкость не менее: · А (серебряные контакты) - 2,5х106 циклов · Б (биметаллические контакты) -1,0х106 циклов. Рабочая температура среды от -55 до +55°С. Повышенная влажность при температуре 35°С - 100% Масса - не более 0,95кг. Пример условного обозначения выключателя: ВПУ-011 БГ-111161-670 2.1 В зависимости от вида ввода проводников, выключатели конечные ВПУ-011 могут быть изготовлены с резьбовым неуплотненным вводом, с резьбовым уплотненным вводом (сальником) или с кабельным разъемом.
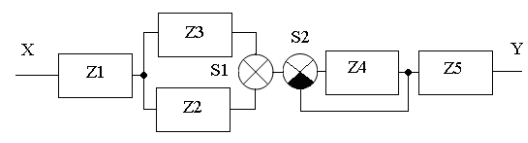
Рисунок 4 - Выключатели серии ВПУ-011 Глава2. Расчетная часть Рассмотрим модель динамического узла САУ по заданному варианту №16, указанной на рисунке 2.1
Рисунок 2.1. Динамическая модель узлов. Исходные данные звеньев в таблице 2.1. Таблица 2.1.
Условны обозначения: У - усилительное звено; И- интегрирующее звено; Д- реальное дифференцирующее звено; AI- апериодическое звено первого порядка; AII- апериодическое звено второго порядка; И-Д - интегро- дифференцирующее звено.
Таблица 6 - Переменные программы
Заключение. Внедрение на предприятиях сборного железобетона разработанного проекта позволяет повысить скорость приготовления бетонной смеси, исключить ручной труд, обеспечить комфортные условия труда рабочих, обеспечить высокую надежность эксплуатации оборудования. Однако рассмотренные средства и способы автоматизации не позволяют еще в полной мере решить задачу комплексной автоматизации, т. е. добиться такого положения, когда автоматизированы все взаимосвязанные основные участки производственного процесса. Чтобы решить эту задачу необходимо завершить ряд опытно-конструкторских и научно-исследовательских работ по созданию новых совершенных типов автоматизированного технологического оборудования, и новых средств и систем автоматизации.
Список литературы
1. В.А., “Теория систем автоматического регулирования”. - М.: Наука, 1975 2. ЕвдокимовВ.А., “Механизация и автоматизация строительногопроизводства”, 1985; 3. Бауман В.А., “Строительные машины” в 2-х томах, М., 1977; 4. Горинштейн Л.Л., “Основы автоматики и автоматизация производственныхпроцессов”, М., 1985. Введение
Автоматизация технологического процесса — совокупность методов и средств, предназначенная для реализации системы или систем, позволяющих осуществлять управление самим технологическим процессом без непосредственного участия человека, либо оставления за человеком права принятия наиболее ответственных решений. Как правило, в результате автоматизации технологического процесса создаётся АСУ ТП. Основа автоматизации технологических процессов — это перераспределение материальных, энергетических и информационных потоков в соответствии с принятым критерием управления (оптимальности). Основными целями автоматизации технологического процесса являются: · Повышение эффективности производственного процесса; · Повышение безопасности; · Повышение экологичности; · Повышение экономичности. Цели достигаются посредством решения следующих задач автоматизации технологического процесса: · Улучшение качества регулирования · Повышение коэффициента готовности оборудования · Улучшение эргономики труда операторов процесса · Обеспечение достоверности информации о материальных компонентах, применяемых в производстве (в т.ч. с помощью управления каталогом) · Хранение информации о ходе технологического процесса и аварийных ситуациях Решение задач автоматизации технологического процесса осуществляется при помощи: · внедрения современных методов автоматизации; · внедрения современных средств автоматизации. Автоматизация технологических процессов в рамках одного производственного процесса позволяет организовать основу для внедрения систем управления производством и систем управления предприятием. В связи с различностью подходов различают автоматизацию следующих технологических процессов: · Автоматизация непрерывных технологических процессов; · Автоматизация дискретных технологических процессов; · Автоматизация гибридных технологических процессов. Целью данной курсовой работы является исследование системы автоматического управленияавтоматизация дозирования из расходных бункеров цемента» Для достижения цели были поставлены следующие задачи: · Описание структурного состава САУ(16) · Определение передаточной функции динамической модели модуля · Рассчитать и построить частотные характеристики системы · Проверить САУ на устойчивость
Глава1. Общая часть Структурный состав САУ. Система автоматического управления (САУ)- комплекс устройств, предназначенный для автоматического изменения одного или нескольких параметров объекта управления с целью установления требуемого режима его работы. САУ обеспечивает поддержание постоянства заданных значений регулируемых параметров или их изменение по заданному закону (системы стабилизации, программного управления, следящие системы)либо оптимизирует определенный критерий качества управления. Для осуществления цели управления с учётом особенностей управляемых объектов на них подаются управляющие воздействия, которые предназначены также для компенсации внешних возмущающих воздействий, стремящихся нарушить нормальное функционирование объекта. По типу управления САУ подразделяются на замкнутые, разомкнутые и комбинированные. Основной тип САУ- замкнутые, в которых цепь прохождения сигналов образует замкнутый контур, включающий устройств управления и управляемый объект; отклонения управляемой величины от желаемых значений компенсируются воздействием через обратную связь вне зависимости от причин, вызвавших эта отклонения. Такое управление называется управлением по отклонению. В разомкнутых САУ управление ведётся по жёсткой программе без анализа и учёта факторов в процессе работы управляемого объекта - на устройство управления не поступают сигналы, несущие информацию о текущем состоянии объекта управления, иногда измеряются и компенсируются лишь главные из возмущений (помех). Такое управление называется управлением по возмущению. В комбинированных САУ используются оба эти принципа управления (по отклонению и по возмущению). В САУ сложными техническими или технологическими процессами с большим числом регулируемых параметров широко применяются средства вычислительной техники - микропроцессоры, ЭВМ, управляющие машины.
Рис1. Функциональная схема системы автоматического регулирования. Обозначение через y(t) функцию, описывающую изменение во времени регулируемой величины, т.е. y(t)- регулируемая величина. Через g(t) обозначим функцию, характеризирующую требуемый закон ее изменения. Величину g(t)будем называть задающим воздействием. Тогда основная задача автоматического регулирования сводится к обеспечению равенства y(t)=g)t). Большинства САР решают эту задачу, используя принцип регулирования по отклонению. Функциональная схема такой САР показана на рис.1. Суть принципа регулирования по отклонению состоит в следующем. Регулируемая величина y(t) измеряется с помощью датчика Д и поступает на элемент сравнения ЭС. На этот же элемент сравнения от датчика задания ДЗ поступает задающее воздействие g(t). В ЭС величина g(t) и y(t) сравниваются, т.е. из g(t) вычитается y(t). На выходе ЭС формируется сигнал, равный отклонению регулируемой величины от заданной, т.е. ошибка
Описание функциональной схемы автоматизации дозирования из расходных бункеров цемента Датчики массы установлены на двух опорах (WE), а также по месту располагается и усилитель (×К), который увеличивает мощность сигнала. Затем на пульте установлен сумматор (Σ), который суммирует два сигнала, а также по месту располагается и усилитель (×К), который увеличивает мощность сигнала. Далее сигнал поступает на делитель напряжений, после которого отображается на устройстве. На пульте находятся кнопки (NS) которыми можно управлять двигателями и соответствующими лампочками которые показывают на действие двигателей.
Рисунок 1. Мостовая схема
Рисунок 2. Схема сумматора
Рисунок 3. Схема усилителя Рисунок 4. Схема делителя напряжений Выбор технических средств Принципиальная схема начинается с построения двух одинаковых схем с 20-ю тензодатчиками (В1 – В20). Сигнал поступает на измерительный усилитель DA2, после чего сигналы суммируются, так как датчики установлены на двух опорах. Сумматором является операционный усилитель DA4. реле КT1. транзистор КТЗ16. комплект дозаторов серии АДУБ-1200Ф, состоящий из трех дозаторов для заполнителей типа АВДИ-200Ф,одного дозатора для цемента типа АВДЦ-1200Ф и одного дозатора для жидкостей типа АВДЖ-1200Ф. осветители.
Рисунок 1 -Технологическая схема дозировочного отделения.
концевыми микропереключателями. Работа дозировочного отделения должна проходить в следующей последовательности: 1. Открываются затворы емкостей инертных материалов первых фракций, а также затворы цемента и воды и компоненты начинают поступать в дозаторы; 2. Отвешивание -указывающая стрелка с фотоэлементом дойдет до заданного значения веса, срабатывают соответствующие реле и затворы емкостей закрываются; 3. Открываются затворы инертных материалов, вторых фракций и начинается их отвешивание. Цемент и вода могут отвешиваться как в один, так и в два приема; 4. После окончания отвешивания вторых фракций компоненты выгружаются в бетономешалку. Предварительно должны быть получены данные о готовности мешалки принять материалы. реле классов конечныйвключатель 1 КВК или 2 КВКи возбуждается реле 1РКВК или 2РКВК, замыкая свои контакты в схеме управления дозировочным отделением (см. рисунок 2).
  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 Этот сигнал поступает на усилитель У и затем подается на исполнительный элемент ИЭ, который и оказывает регулирующее воздействие на объект регулирования ОР. Это воздействие будет изменяться до тех пор пока регулируемая величина y(t) не станет равна заданной g(t). На объект регулирования постоянно влияют различные возмущающие воздействия: нагрузка объекта, внешние факторы и др. Эти возмущающие воздействия стремятся изменить величину y(t). Но САР постоянно определяет отклонение y(t) отg(t) и формирует управляющий сигнал, стремящийся свести это отклонение к нулю. По своему назначению элементы, входящие в состав систем автоматики подразделяются на чувствительные, усилительные и исполнительные.
Этот сигнал поступает на усилитель У и затем подается на исполнительный элемент ИЭ, который и оказывает регулирующее воздействие на объект регулирования ОР. Это воздействие будет изменяться до тех пор пока регулируемая величина y(t) не станет равна заданной g(t). На объект регулирования постоянно влияют различные возмущающие воздействия: нагрузка объекта, внешние факторы и др. Эти возмущающие воздействия стремятся изменить величину y(t). Но САР постоянно определяет отклонение y(t) отg(t) и формирует управляющий сигнал, стремящийся свести это отклонение к нулю. По своему назначению элементы, входящие в состав систем автоматики подразделяются на чувствительные, усилительные и исполнительные.