|
|
Объекты регулирования и регуляторыСтр 1 из 3Следующая ⇒ ВВЕДЕНИЕ
Параметры настройки промышленных регуляторов Параметрами настройки или просто "настройками" промышленных регуляторов являются коэффициенты дифференциальных уравнений kP, kP1, T и, T д У П-регулятора только одна настройка кр = у/ ε, где у — перемещение регулирующего органа (выходного вала исполнительного механизма), % хода, а ε — отклонение регулируемой величины от заданного значения в единицах регулируемой величины. Кроме параметра кр статические свойства промышленных регуляторов определяет порог чувствительности а или зона нечувствительности Δ = 2σ. Зоной нечувствительности называется максимальный диапазон изменения сигнала па входе регулятора, не вызывающий появления сигнала на его выходе. Строго говоря, зона нечувствительности является характеристикой нелинейных регуляторов, но тем не менее и у промышленных линейных регуляторов имеется эта зона, вне которой их поведение определяется линейными законами регулирования. "Зоны нечувствительности определяются в относительных единицах: Δ = (2σ /х т ах) 100 %, где σ — порог чувствительности; Динамические свойства регуляторов определяются параметрами Т ии Тд. Рассмотрим решение дифференциального уравнения при постоянном значении отклонения ε (ε = const): У = kP ε + kP ε t / T и где kP ε = у п— перемещение, вызванное действием пропорциональной части, а kP ε t /T и = Y и — перемещение, вызванное действием интегральной части ПИ-регулятора. Из условия равенства у ии у п: kP ε = kP ε t / T и следует, что t = Ти, т.е.время интегрирования Ти можно представить как течение котор термином "время удвоения" вместо термина "время интегрирования". Для выяснения смысла параметра Тд рассмотрим простейший случай работы ПД-регулятора, при котором входной сигнал — отклонение έ изменяется с постоянной скоростью έ= v = const Из этого следует, что перемещение регулирующего органа под воздействием П-части регулирующий орган переместится сразу на величину уд = kP T д υ. Определим условие, переместит регулирующий орган на такую Д-часть. Учитывая, что ε = vt, получим kP vt = kP v T д, т.e. t= T д Следовательно, T д — время, в течение которого пропорциональная часть удваивает действие дифференциальной части регулятора. Д-часть как бы предваряет действие пропорциональной части, заблаговременно перемещая регулирующий орган на величину, зависящую от скорости изменения входной величины е*. Таким образом, Д-часть форсирует ликвидацию возникшего отклонения. Время Тд называют постоянной дифференцирования, а иногда временем предварения. Этот параметр является настрой кой Д-части ПД-регулятора. У ПИД-регулятора в соответствии с его равнением три параметра настройки: kP, T и, T д Функциональный смысл этих настроек аналогичен. Параметры настройки kP, T и, T д, Δ изменяются вручную с помощью специальных ручек на панели регуляторов. В современных конструкциях регуляторов предусмотрена возможность автоматического ввода в регулятор внешних корректирующих воздействий, изменяющих его настройки в зависимости от условий работы объекта регулирования или по рекомендациям УВМ. Автоматизация технологических процессов в дорожном строительстве Анализируя различные производственные процессы можно разделить все технологические операции на две группы: механические перемещения (транспортирование) и преобразования. Первая группа только организует технологический процесс, вторая активно вмешивается в него, изменяя качественный состав конечного продукта. В соответствии с этим можно выделить и два типа управления: управление перемещениями и управление преобразованиями. Технологическими операциями перемещения являются: разгрузка материалов, транспортирование материалов на склады, в расходные бункера, дозаторы, сушильные барабаны, грохоты. Технологические операции преобразования это: дозирование материалов, перемешивание, дробление, пропаривание и т.д. Все технологические операции, в свою очередь, можно разделить на дискретные (порционное взвешивание, циклическое смешивание и т.д.) и непрерывные (сушка, непрерывное дозирование и смешивание).
Циклические дозаторы Наряду с дозаторами непрерывного действия в различных технологических процессах широко используются дозаторы периодического действия. Это весовые устройства, которые состоят из ковша, загрузочных устройств, весового механизма и аппаратуры управления. Усилие от ковша, подвешенного на призменных или упругих опорах, передается через систему рычагов на главное коромысло. Главное коромысло связывается с циферблатным указателем массы. Весовой механизм имеет также рецептурные коромысла, снабженные передвигающимися гирями дляустановки значения отмериваемой дозы. Циферблатный указатель массы оборудован поворотным диском с расположенными на нем датчиками, фиксирующими степень загрузки весового ковша. При заполнении бункера стрелка циферблатной головки, вращаясь, поочередно заставляет срабатывать датчики поворотного диска.
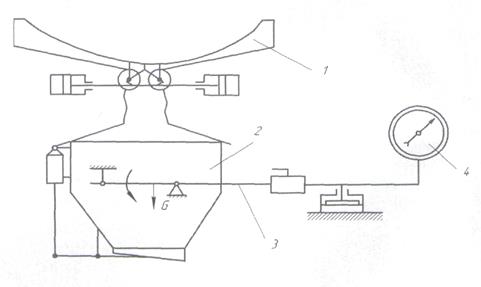
Принципиальная схема весового дозатора АВДЦ-425 показа на рисунок 9.6 Автоматический весовой дозатор для цемента состоит из аэрационного питателя 1, весового ковша 2, рычажной системы 3 и циферблатного указателя 4.
Рисунок 9.6 - Схема автоматического дозатора АВДЦ-425Ф
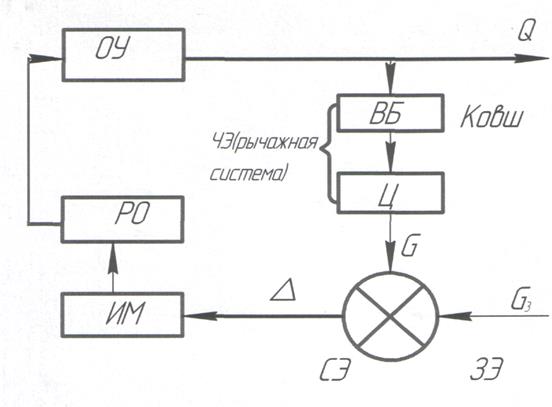
При включении питателя происходит заполнение ковша, который через рычажную систему вращает стрелку циферблатной головки до замыкания соответствующего контакта на указателе массы. При этом включаются пневмоцилиндры закрытия впускного затвора, и поступление материала в весовой бункер прекращается. Отдозированная таким образом порция материала выгружается из бункера самотеком при включении пневмоцилиндра открытия выпускного затвора. Рассмотренный дозатор циклического действия оснащен простейшей системой управления с минимально необходимым набором функциональных элементов, реализующих процесс набора заданной дозы (рисунок 9.7). Объектами управления (ОУ) в системе служат питатели разнообразных типов. Управляемый параметр — масса дозируемого вещества G — определяется ковшом с рычажной подвеской (ВБ) и циферблатным указателем массы (Ц), которые выполняют роль чувствительного элемента. Циферблатный указатель выполняет функцию сравнения текущего значения массы с заданием G3. Исполнительный механизм (ИМ) с регулирующим органом (РО) включаются в работу кратковременно, отсекая подачу материала питателем. Дозатор обладает системой управления дискретного действия с кратковременным восстановлением контура обратной связи, по которому передается воздействие на изменение управляющего параметра — расхода питателя. Недостатки такого способа управления очевидны. Перемещение стрелки, фиксирующей изменение массы материала в бункере, испытывает на себе сильное влияние динамического усилия от столба материала, подаваемого питателем, а также от ускорений, получаемых бункером в процессе его заполнения. Система управления по окончании цикла дозирования фиксирует наряду с истинной еще и фиктивную массу, значение которой не может быть откорректировано по линии обратной связи. Для повышения точности автоматическое управление весовым периодическим дозированием должно осуществляться по специальному алгоритму, учитывающему влияние процесса истечения материала, а также количество материала, поступающего в бункер дозатора после подачи сигнала на закрытие затвора питателя в каждом цикле дозирования.
Рисунок 9.7 - Функциональная схема дозатора циклического действия
Большинство зарубежных систем управления дозированием предусматривают оснащение дозаторов питателями принудительного действия, в том числе с регулируемой интенсивностью, обеспечивающими подачу материалов в режимах «грубого» и «точного» дозирования. Одним из обязательных условий нормальной работы таких систем является непрерывный автоматический контроль фактической точности дозирования, обеспечивающий в случае нарушения требуемых допусков остановку процесса приготовления и выдачу обслуживающему персоналу информации о характере отклонения.
Устройства ветровой защиты Для сигнализации о величине ветровой нагрузки применяются сигнальные анемометры. Они устанавливаются на кранах с большой высотой подъема с целью измерения скорости ветра, автоматического определения опасности по совместному воздействию скорости ветра и продолжительности порыва ветра и включения сигнальных и противоугольных устройств. Конструктивно сигнальные анемометры состоят из датчика скорости ветра, устанавливаемого в верхней части крана и измерительного пульта, устанавливаемого в кабине. Сам датчик - это тахогенератор с трехчашечной крыльчаткой. Сигнал от него преобразуется и подается на световое табло с индикацией «Внимание», «Предел», «Опасно». Анемометры М-25 МЦ-цифровой и М-25 М-2 аналоговый, без сигнализации со стрелочной индикацией.
Основы робототехники Робототехника – область техники, которая занимается разработкой методов расчета и анализом работы манипуляторов и роботов различного назначения, их созданием, а также автоматизированных на их основе объектов и процессов. Робот – это технический комплекс, предназначенный для выполнения различных движений и некоторых интеллектуальных функций человека и обладающий необходимыми для этого исполнительными устройствами, управляющими и информационными системами, а также средствами решения вычислительно-логических задач. Манипулятор – управляемое устройство или машина для выполнения двигательных функций, аналогичных функциям руки человека при перемещении объектов в пространстве, оснащенное рабочим органом. Роботы производятся в напольном, подвесном и портальном исполнениях. По типу систем управления современные промышленные роботы делятся на три группы, именуемые также «поколениями»: программные, адаптивные и интеллектные (с элементами искусственного интеллекта). Все они обладают свойствами быстрого перепрограммирования на различные операции, причем в первом поколении (программные роботы) перепрограммирование производится человеком, после чего робот действует автоматически, многократно повторяя жестко заданную программу. Во втором поколении (адаптивные роботы) основы программы действий робота закладываются человеком, но сам робот имеет свойства в определенных рамках автоматически перепрограммироваться (адаптироваться) в ходе технологического процесса в зависимости от обстановки, которая неточно определена заранее. В третьем же поколении (интеллектные роботы) задание на работу вводится человеком в более общей форме, а сам робот обладает возможностью принимать решение и планировать свои действия в распознаваемой им неопределенной или меняющейся обстановке, чтобы суметь выполнить заложенное в его память задание. Следовательно, интеллектный робот обладает как бы элементами искусственного интеллекта, состоящими в восприятии неопределенной или меняющейся обстановки, обработке информации о ней с целью выработки и принятия решения, планирования действий и формирования сигналов управления на приводы по всем степеням подвижности манипулятора. Следует отметить, что термин «поколение» не означает смену одних поколений роботов другими, в отличие, например, от поколений вычислительных машин. Каждое из них имеет самостоятельное значение, и будет постоянно совершенствоваться и использоваться. Системы программного управления промышленных роботов можно разделить на системы циклового, позиционного и контурного управления. Все они требуют жесткого позиционирования объектов воздействия. Значительно большей эффективностью обладают адаптивные роботы, оснащенные информационными системами для сбора данных об изменениях внешней среды и оценки состояния объекта и захвата.
ВВЕДЕНИЕ
Объекты регулирования и регуляторы
Любая САУ состоит из двух частей - объекта регулирования и регулятора. Объект регулирования является важнейшей составной частью САУ, от свойств которого зависят свойства и характеристики системы. Объект регулирования является неизменяемой частью системы, поскольку его характеристики определяются конструктивными и технологическими особенностями конкретного агрегата. Рассмотрим свойства объекта регулирования, которые, в конечном счете, предопределяют свойства САУ и имеют решающее значение при разработке систем. Нагрузка объекта - это расход регулирующей среды, используемой в объекте. Под регулирующей средой понимается вещество или энергия, изменение которых приводит к изменению регулируемой величины объекта. Так, при регулировании температуры печи регулирующей средой будет топливо или тепловая энергия, при регулировании уровня жидкости в емкости - жидкость. Чем меньше изменяется нагрузка, тем меньшим колебаниям подвергается регулируемая величина. Количество энергии или вещества, аккумулированное в объекте, называется емкостью объекта. Чем больше емкость, тем меньше скорость изменения регулируемой величины при одинаковом нарушении энергетического или материального баланса и наоборот. При малой емкости объекта регулируемая величина подвержена большим колебаниям и, следовательно, сложнее процесс регулирования. Иногда вместо емкости применяют понятие «коэффициент емкости», который обозначает количество энергии или вещества, вызывающее изменение регулируемой величины на единицу ее изменения. По порядку дифференциального уравнения объекты подразделяются на объекты первого, второго,..., n-го порядка. Иногда эти же объекты называют одноемкостными, двухъемкостными,..., n-емкостными, причем «многоемкостность»- понятие условное и такие объекты не обязательно включают несколько одноемкостных объектов, только их динамика аналогична динамике объектов, состоящих из отдельных емкостей. В зависимости от того, как регулируют объекты на приложенные возмущения, различают объекты с самовыражением и без самовыражения. Самовыражением называют свойство объекта, благодаря которому возникшее нарушение энергетического или материального баланса ликвидируется самостоятельно или без участия регулятора; при этом регулируемая величина стремится к новому установившемуся значению. Таким образом, самовыравнивание - это способность объекта, к восстановлению равновесия, нарушенного в результате действия возмущений. Количественно способность объекта к самовыравниванию характеризуется коэффициентом выравнивания Кс - величиной, обратной коэффициенту передачи объекта Коб по каналу возмущенного воздействия, т.е. Кс=1/ Коб Объекты регулирования, обладающие самовыравниванием (Кс>0) относятся устойчивым или статическим объектам. Эти объекты могут быть представлены апериодическими звеньями первого или второго порядков и их комбинациями. При Кс → ∞ объекты регулирования обладают несколько высоким коэффициентом самовыражения, что в автоматическом регулировании не нуждаются. В большинстве случаев коэффициент выравнивания зависит от нагрузки объекта. Объекты без самовыравнивания, в которых приложенное ступенчатое возмущение приводит к неограниченному изменению регулируемой величины, называются неустойчивыми или астатическими. Такие объекты содержат в своей структуре интегрирующие звенья. Основными динамическими свойствами объекта являются инерционность и запаздывание. Инерционность объекта характеризует его способность к замедлению накапливать и расходовать вещество или энергию в результате наличия сопротивлений, которые препятствуют их поступлению и расходу. Инерционность объекта зависит от его емкости, которая физически выражается в виде теплоемкости, вместимости резервуара, инерционности движущихся масс и т. д. Для реальных объектов момент начала изменения регулируемой величины не совпадает с моментом приложения возмущения к объекту. Отставание изменения регулируемой величины от момента подачи возмущения называется запаздыванием. Различают два вида запаздывания: транспортное (или чистое) запаздывание τт и емкостное (или инерционное) τе. Транспортное запаздывание обусловлено наличием звена чистого запаздывания, например наличием в составе агрегата транспортера, загружающего материал. Транспортное запаздывание значительно усложняет систему автоматического регулирования и сам процесс регулирования, поэтому на практике по возможности стремятся к уменьшению τт , располагая регулирующие органы на более близком расстоянии от объекта, а также увеличивая скорость транспортировки вещества или энергии в объект. Емкостное запаздывание τе обусловлено наличием тепловых, гидравлических, электрических и прочих сопротивлений в объекте, которые вызывают отставание изменения выходной величины относительно момента приложения возмущения. Если характеристики реальных объектов регулирования изменяются во времени, то объекты описываются дифференциальными уравнениями с коэффициентами, которые изменяются в функции времени (нестационарные объекты). Если характеристики объектов не изменяются во времени или изменяются незначительно, то объекты описываются дифференциальными уравнениями с постоянными коэффициентами (стационарные объекты). В общем случае сложный объект может быть представлен в виде структурной схемы, состоящей из ряда типовых звеньев. Динамические свойства объектов в общем виде можно приближенно описать передаточными функциями: для статических объектов W (р) = [koб/(Toб р + 1)] е―pτоб (1.1) Астатический объект первого порядка с запаздыванием может быть описан передаточной функцией W (р) = (koб1/ р) е―pτоб (1.2) В передаточных функциях (1) и (2) τоб = τт + τе — общее время запаздывания. где коб — коэффициент передачи статического объекта; его размерность: единица измерения регулируемой величины, деленная на единицу измерения входной величины; коб1 — коэффициент передачи астатического объекта, его размерность: единица измерения скорости изменения выходной величины, деленная на единицу измерения входной величины; τт — транспортное запаздывание, с; Тi — постоянные времени апериодических звеньев. Экспериментальные методы определения статических и динамических характеристик делят на активные и пассивные. При активных методах исследуемый объект подвергают заранее спланированной серии опытов, с помощью которых изучают статику и динамику объекта путем подачи на вход объекта искусственных возмущений определенной формы. При пассивных методах объект исследуют путем сопоставления выходных и входных величин в условиях нормальной эксплуатации объекта. Активные методы определения динамических характеристик объекта регулирования, в зависимости от типа входного воздействия, подразделяются на методы с использованием ступенчатого, импульсного воздействий и гармонических колебаний. В результате экспериментов получают кривые разгона объекта, импульсные кривые разгона и частотные характеристики. При снятии кривой разгона величина воздействия должна составлять 5-15% от номинального значения входной величины, а при снятии импульсной кривой разгона-15-25%. Выбор формы аппроксимации временной характеристики определяется не только ее видом, но и выбором метода расчета параметров настройки регулятора. Статический объект можно аппроксимировать апериодическим звеном первого порядка и звеном с чистым запаздыванием. При этом экспериментальная кривая разгона аппроксимируется линией, состоящей из отрезка прямой (чистое запаздывание) и экспоненты (кривая разгона апериодического звена первого порядка). По ней определяются динамические параметры объекта (Коб τоб Тоб)
Рис.7.1 Для определения динамических параметров статического объекта по кривой разгона, в точке максимальной скорости изменение выходной величины (в точке перегиба кривой), приводят касательную к кривой разгона и продолжают ее до пересечения с осью абсцисс и линией нового установившегося значения выходной величины у(∞). Отрезком времени от начала воздействия до точки пересечения касательной с осью абсцисс определяется время запаздывания τоб. Постоянная времени Тоб , которая характеризует инерционность объекта, графически определяется как отрезок времени от момента пересечения касательной с осью абсцисс, до момента пересечения ее с линией нового установившегося значения выходной величины. Коэффициент передачи определяется из выражения, т.е. Ко6=( у(∞) -у(0))/ Δ х представляет собой отношение изменения выходной величины при переходе из начального в новое положение, к изменению возмущения. Методика определения динамических параметров объекта по кривым разгона предполагает подачу на вход объекта идеального ступенчатого воздействия. Практически невозможно получить идеальное ступенчатое воздействие из-за конечной скорости исполнительного механизма, перемещающего регулирующий орган. Если время перемещения регулирующего органа t6 существенно по сравнению со временем переходного процесса, то для уменьшения погрешности определения динамических параметров реальное возмущение заменяют ступенчатым, отсчитываемым с момента времени t0.
Рис. 1.2 Для астатических объектов запаздывание τоб равно отрезку времени между моментом подачи возмущения t0 и точкой пересечения касательной к кривой разгона с осью абсцисс. Коэффициент передачи Ко61 астатических объектов определяют из кривой разгона как отношение установившейся скорости изменения выходной величины (у(∞)) к изменению входной величины Δ х: Ко61= у(∞)/Δ х=tgα/ Δ х Определение динамических параметров объектов регулирования по импульсной кривой разгона и по частотным характеристикам сложнее и менее точно, поэтому рассматривать не будем. Закон регулирования является непрерывным, если математическая зависимость представляет собой непрерывную функцию, т. е. непрерывному изменению регулируемой величины соответствует непрерывное изменение регулирующего воздействия. Наиболее распространенными непрерывными линейными законами регулирования, которые обычно реализуются в серийно выпускаемой аппаратуре и считаются типовыми, являются следующие: пропорциональный (П), интегральный (И), пропорционально-интегральный (ПИ), пропорционально-дифференциальный (ПД), пропорционалыю-интегрально-дифференциальный (ПИД) законы. Технические устройства, реализующие законы регулирования, называются соответственно П-, И-, ПИ-, ПД-, ПИД-регуляторами. Рассмотрим более подробно законы регулирования. Пропорциональный регулятор. П-регулятор характеризуется уравнением вида Ур=kР ε, ■ где kР— коэффициент передачи, имеющий, размерность: % хода вала исполнительного механизма/единица измерения регулируемой величины. Передаточная функция П-регулятора W п (p) = kР. В динамическом отношении П-регуляторы представляют собой пропорциональное звено. Интегральный регулятор. Уравнение И-регулятора Ур=kР1 ∫ ε dt где kР1— коэффициент передачи И-регулятора, имеющий размерность: % хода вала исполнительного механизма/единица измерения регулируемой величины, умноженная на секунду. Передаточная функция И-регулятора W и (p) = kР / р В динамическом отношении И-регулятор аналогичен идеальному интегрирующему звену. Пропорционально-интегральный регулятор. Уравнение ПИ-регулятора имеет вид y = kР [ε +(1/ T и)∫ ε dt]. где Ти — постоянная времени интегрирования. Регулирующее воздействие ПИ-регулятора состоит из двух составляющих: пропорциональной kР εи интегральной (kР /Ти) ∫ ε dt. В динамическом отношении ПИ-регулятор эквивалентен П-регулятору с коэффициентом передачи kР и И-регулятору с коэффициентом передачи кр1Т и, включенным параллельно. Передаточная функция ПИ-регулятора W пи (P)=kP [l + l /Tnp ] Пропорционально-дифференциальный регулятор. Уравнение ПД-регулятора У = kP ( ε +Т д ε′ ) где Тд — постоянная времени дифференцирования. Регулирующее воздействие состоит из двух составляющих: пропорциональной kP εи дифференциальной кр Т д ε′. Передаточная функция ПД-регулятора W пд (Р)= кр (1+Тд р) В динамическом отношении ПД-регулятор представляет собой параллельное соединение пропорционального и идеального дифференцирующего звеньев. Пропорщдналъно-интегралъно-дифференциалъный регулятор Уравнение ПИД-регулятора У = kР[ε +(1/ T и)∫ ε dt+Тд ε]. Регулирующее воздействие ПИД-регулятора складывается из воздействии, обусловленных работой П-, И-, Д-составляющих В динамическом отношении ПИД-регулятор представляет собой параллельное соединение трех звеньев: пропорционального идеального интегрирующего и идеального дифференцирующего Передаточная функция ПИД-оегулятопа Реальные, регуляторы отличаются от идеальных инерционностью исполнительного механизма и других элементов. Реальный регулятор структурно можно представить последовательным соединением идеального регулятора и апериодического звена 1-го порядка. Поэтому передаточная функция реального регулятора Wр*(p) является произведением передаточной функции идеального регулятора Wp (p) и передаточной функции инерционного апериодического звена 1-го порядка 1 1(Т ин р +1): Wр*(p) = Wp{p) W ин {p) = Wp(p)/(Т ин р +1), где Тин — постоянная времени инерционного звена. Переходные функции h(t) идеальных и реальных регуляторов приведены в табл. 1 Таблица 1 Динамические характеристики регуляторов
  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ого интегральная часть ПИ-регулятора время, в течение которого интегральная удваивает перемещение регулирующего органа, вызванное действием его пропорциональной части. Поэтому в технической литературе иногда пользуются
ого интегральная часть ПИ-регулятора время, в течение которого интегральная удваивает перемещение регулирующего органа, вызванное действием его пропорциональной части. Поэтому в технической литературе иногда пользуются