
|
|
Расчет магнитной цепи асинхронного двигателяСтр 1 из 5Следующая ⇒ ГЛАВА 11 •Магнитная цепь асинхронной машины Основные понятия
Магнитодвижущая сила обмотки статора создает магнитный поток, который замыкается через элементы магнитной системы машины. Магнитную систему асинхронной машины называют неявнополюсной (рис. 11.1), так как она не имеет явно выраженных магнитных полюсов (сравните с рис. 20.1). Количество магнитных полюсов в неявнополюсной магнитной системе определяется числом полюсов в обмотке, возбуждающей магнитное поле, в данном случае в обмотке статора. Магнитная система машины, состоящая из сердечников статора и ротора, представляет собой разветвленную симметричную магнитную цепь. Например, магнитная система четырехполюсной машины состоит из четырех одинаковых ветвей, в каждой из которых замыкается половина магнитного потока одного полюса (рис. 11.1). В двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Каждая из таких ветвей образует неразветвленную магнитную цепь, которая и является предметом расчета. На рис. 11.2 представлена магнитная цепь неявнополюсной машины. Здесь видны участки магнитной цепи: воздушный зазор δ, зубцовый слой статора hz1, зубцовый слой ротора hz1, спинка ротора Lc2, спинка статора Lc1. Замыкаясь в магнитной цепи, магнитный поток проходит воздушный зазор и зубцовые слои статора и ротора дважды. Каждый из перечисленных участков оказывавает магнитному потоку некоторое магнитное сопротивление. Поэтому на каждом участке магнитной цепи затрачивается часть МДС обмотки статора, называемая магнитным напряжением:
где Таким образом, расчет МДС обмотки статора на пару полюсов сводится к расчету магнитных напряжений на всех участках магнитной цепи. Полученное в результате расчета магнитной цепи значение МДС на пару полюсов
статора:
I1μ = Исходным параметром при расчете магнитной цепи асинхронного двигателя является максимальная магнитная индукция в воздушном зазоре Вδ. Величину Вδ принимают по рекомендуемым значениям в зависимости от наружного диаметра сердечника статора D1нар и числа полюсов 2р. Например при D1нар = 300
Рис. 11.1. Магнитное поле четырехполюсной Рис. 11.2. Магнитная цепь асинхронной машины асинхронной машины
Вδ = 0,80 Магнитная индукция Вδ определяет магнитную нагрузку двигателя: при слишком малом Вδ магнитная система двигателя недогружена, а поэтому габаритные размеры двигателя получаются неоправданно большими; если же задаться чрезмерно большим течением Вδ, то резко возрастут магнитные напряжения на участках магнитной системы, особенно в зубцовых слоях статора и ротopa, в результате возрастет намагничивающий ток статора I1μ снизится КПД двигателя (см. § 13.1). Для изготовления сердечников статора и ротора асинхронных двигателей обычно применяют холоднокатаные изотропные листовые электротехнические стали, обладающие одинаковой магнитной проводимостью вдоль и поперек проката листов (табл 11.1). Таблица 11.1
Здесь λ1 = λп1 + λд1 + λл1 (11.7) — коэффициент магнитной проводимости рассеяния обмотки статора; λп1, λд1 и λл1 — коэффициенты магнитной проводимости пазового, дифференциального и лобового рассеяния статора. Индуктивное сопротивление рассеяния обмотки ротора определяется выражениями, зависящими от типа обмотки ротора. Для короткозамкнутой обмотки при неподвижном роторе (Ом) х2 = 7,9 • 10-9 f1 li2 λ2 (11.8) Здесь λ2 = λп2 + λд2 + λкл + λск (11.9) — коэффициент магнитной проводимости рассеяния короткозамкнутой обмотки ротора: λп2, λд2, λкл и λск — коэффициенты магнитной проводимости рассеяния пазового, дифференциального, короткозамыкающих колец и скоса пазов короткозамкнутого ротора. Если же ротор фазный и его обмотка выполнена по типу обмотки статора, то индуктивное сопротивление (Ом) рассеяния этой обмотки х2ф при неподвижном роторе (s = 1) определяется выражением, аналогичным (11.6): x1 = 1,58 • 10-8 f1 li2 ω22 λ2ф / (pq2) (11.10) где λ2ф = λп2 + λд2 + λл2 (11.11)
Рис. 11.4. Магнитные потоки рассеяния асинхронной машины
В выражениях (11.6) и (11.10) расчетная длина сердечников статора li1, и ротора li2 — в миллиметрах. Для расчета коэффициентов магнитной проводимости пользуются выражениями, приводимыми в руководствах по расчету электрических машин, например в [5] или [15]. ГЛАВА 13 • Электромагнитный момент и рабочие характеристики асинхронного двигателя Рис. 13.2. Зависимость режимов работы асинхронной машины от скольжения
Анализ выражения (13.16) показывает, что максимальный момент асинхронной машины в генераторном режиме больше, чем в двигательном (Mmax г > Мmах д). На рис. 13.2 показана механическая характеристика асинхронной машины М = f (s) при U1 = const. На этой характеристике указаны зоны, соответствующие различным режимам работы: двигательный режим (0 < s ≤ 1), когда электромагнитный момент М является вращающим; генераторный режим (- ∞ < s < 0) и тормозной режим противовключением (1 < s < + ∞), когда электромагнитный момент М является тормозящим. Из (13.14) следует, что электромагнитный момент асинхронного двигателя пропорционален квадрату напряжения сети: M ≡ U12. Это в значительной степени отражается на эксплуатационных свойствах двигателя: даже небольшое снижение напряжения сети вызывает заметное уменьшение вращающего момента асинхронного двигателя. Например, при уменьшении напряжения на 10% относительно номинального (U1 = 0,9Uном) электромагнитный момент двигателя уменьшается на 19%: M/ =0,92 M, где М— момент при номинальном напряжении сети, а М/ — момент при пониженном напряжении. Для анализа работы асинхронного двигателя удобнее воспользоваться механической характеристикой M = f (s), представленной на рис. 13.3. При включении двигателя в сеть магнитное поле статора, не обладая инерцией, сразу же начинает вращение с синхронной частотой n1, в то же время ротор двигателя под влиянием сил инерции в начальный момент пуска остается неподвижным (n2 = 0) и скольжение s = 1. Подставив в (13.14) скольжение s = 1, получим выражение пускового момента асинхронного двигателя (Н Мп =
Рис 13.3. Зависимость электромагнитного момента асинхронного двигателя от скольжения
Под действием этого момента начинается вращение ротора двигателя, при этом скольжение уменьшается, а вращающий момент возрастает в соответствии с характеристикой М = f (s). При критическом скольжении sкр момент достигает максимального значения Мmах. С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору двигателя: момента х.х. M0 и полезного нагрузочного момента (момента на валу двигателя) М2, т. е. М = М0 + M2 = Mст (13.20) Следует иметь в виду, что при скольжениях, близких к единице (пусковой режим двигателя), параметры схемы замещения асинхронного двигателя заметно изменяют свои значения. Объясняется это в основном двумя факторами: усилением магнитного насыщения зубцовых слоев статора и ротора, что ведет к уменьшению индуктивных сопротивлений рассеяния x1 и х'2, и эффектом вытеснения тока в стержнях ротора, что ведет к увеличению активного сопротивления обмотки ротора r/2. Поэтому параметры схемы замещения асинхронного двигателя, используемые при расчете электромагнитного момента по (13.14), (13.16) и (13.18), не мoгyт быть использованы для расчета пускового момента по (13.19). Статический момент Мст равен сумме противодействующих моментов при равномерном вращении ротора (n2 = const). Допустим, что противодействующий момент на валу двигателя М2 соответствует номинальной нагрузке двигателя. В этом случае устано вившийся режим работы двигателя определится точкой на механической характеристике с координатами М = Мном и s = sном, где Мном и shom — номинальные значения электромагнитного момента и скольжения. Из анализа механической характеристики также следует, что устойчивая работа асинхронного двигателя возможна при скольжениях меньше критического (s < sкр), т. е. на участке ОА механической характеристики. Дело в том, что именно на этом участке изменение нагрузки на валу двигателя сопровождается соответствующим изменением электромагнитного момента. Так, если двигатель работал в номинальном рехиме (Мном; shom), то имело место равенство моментов: Мном = M0 + М/2. Если произошло увеличение нагрузочного момента M2 до значения М'2, то равенство моментов нарушится, т. е. Мном < М0 + М'2, и частота вращения ротора начнет убывать (скольжение будет увеличиваться). Это приведет к росту электромагнитного момента до значения M' = М0 + М'2 (точка B), после чего режим работы двигателя вновь станет установившимся. Если же при работе двигателя в номинальном режиме произойдет уменьшение нагрузочного момента до значения М"2 то равенство моментов вновь нарушится, по теперь вращающий момент окажется больше суммы противодествующих: Мном > М0 + М″2. Частота вращения ротора начнет возрастать (скольжение будет уменьшаться), и это приведет к уменьшению электромагнитного момента М до значения М" = М0 + М″2 (точка С); устойчивый режим работы будет вновь восстановлен, но уже при других значениях М и s. Работа асинхронного двигателя становится неустойчивой при скольжениях s ≥ sкр. Так, если электромагнитный момент двигателя М = Мmах, а скольжение s = sкp, то даже незначительное увеличение нагрузочного момента М2, вызвав увеличение скольжения s, приведет к уменьшению электромагнитного момента М. За этим ледует дальнейшее увеличение скольжения и т. д., пока скольжение не достигнет значения s = 1, т. е. пока ротор двигателя не остановится. Таким образом, при достижении электромагнитным моментом максимального значения наступает предел устойчивой работы асинхронного двигателя. Следовательно, для устойчивой работы двигателя необходимо, чтобы сумма нагрузочных моментов действующих на ротор, была меньше максимального момента Мст = (М0 + М2) < Мmах. Но чтобы работа асинхронного двигателя была надежной и чтобы случайные кратковременные нагрузки не вызывали остановок двигателя, необходимо, чтобы он обладал перегрузочной способностью. Перегрузочная способность двигателя λ определяется отношением максимального момента Мmax к номинальному Мном. Для асинхронных двигателей общего назначения перегрузочная способность составляет λ = Mmax /Mном = 1,7 ÷ 2,5. Следует также обратить внимание на то, что работа двигателя при скольжении s < sкр т. е. на рабочем участке механической характеристики, является наиболее экономичной, так как она соответствует малым значениям скольжения, а следовательно, и меньшим значениям электрических потерь в обмотке ротора Рэ2 = s Pэм. Пример 13.2. Рассчитать данные и построить механическую характеристику М
Решение. Для получения данных, необходимых для построения механической характеристики двигателя, определяем номинальный электромагнитный Мном пусковой Мп и максимальный Мmax моменты, а также два промежуточных значения момента при скольжениях s > sкр. Номинальное скольжение по (10.1) sном = (1500 - 1465)/ 1500 = 0,023. Номинальный электромагнитный момент по (13.14) Мном = Пусковой момент двигателя Мп = Мном = 121 Н Максимальный момент двигателя Мmax = λМном = 2,3 Критическое скольжение по (13.17) sкр = 0,158/ (0,521 + 0,892) = 0,112. Электромагнитные моменты при скольжениях s = 0,2, s = 0,4 и s = 0,7 по (13.14):
M0,2 = M0,4 =
M0,7 =
Результаты вычислений
Механическая характеристика M Применение формулы (13.14) для расчета механических характеристик асинхронных двигателей не всегда возможно, так как параметры схемы замещения двигателей обычно не приводятся в каталогах и справочниках, поэтому для практических расчетов обычно пользуются упрощенной формулой момента. В основу этой формулы положено допущение, что активное сопротивление обмотки статора асинхронного двигателя r1 = 0, при этом M = Mmax Критическое скольжение определяют по формуле sкр = sном (λ + Расчет механической характеристики намного упрощается, если его вести в относительных единицах M M Пример 13.3. Рассчитать механическую характеристику трехфазного асинхронного двигателя типа 4А160М4УЗ (18,5 кВт, 1465 об/мин, λ = 2,3, Mп/ Mном = 1,0) в относительных единицах M
Решение. Критическое скольжение по (13.22) sкр = 0,023 (2,3 + sном = 0,023; sкp = 0,100; s = 0,2; s = 0,4 s = 0,7 M M M M M Результаты расчета
Рис. 13.4. Механическая характеристика асинхронного двигателя типа 4А160М4УЗ
Применение упрощенной формулы (13.23) наиболее целесообразно при расчете рабочего участка механической характеристики и при скольжениях s < sкр,так как в этом случае величина ошибки не превышает значений, допустимых для технических расчетов. При скольжениях s > sкрошибка может достигать 15—17%. Это подтверждается расчетами примера 13.3.
Рис. 13.5. Влияние напряжения на вид механической характеристики асинхронного двигателя
снижается (скольжение увеличивается). Напряжение U1 влияет на значение максимального момента М1mах, а также на перегрузочную способность двигателя λ = Мmax /Mном. Так, если напряжение U1, понизилось на 30%, т. е. U1 = 0,7 U1ном, то максимальный момент асинхронного двигателя уменьшится более чем вдвое: M/max = 0,72 Мmax = 0,49 Mmах. На сколько же уменьшится перегрузочная способность двигателя? Если, например, при номинальном напряжении сети перегрузочная способность λ = Mmax /Mном = 2, то при понижении напряжения на 30% перегрузочная способность двигателя λ' = М'max /Мном = 0,49 Mmax /Mном = 0,49 Как следует из (13.16), значение максимального момента двигателя не зависит от активного сопротивления ротора r/2. Что же касается критического скольжения sкр, то, как это видно из (13.15) оно пропорционально сопротивлению r2'. Таким образом, если и асинхронном двигателе постепенно увеличивать активное сопротивление цепи ротора, то значение максимального момента будет оставаться неизменным, а критическое скольжение будет увеличиваться (рис. 13.6). При этом пусковой момент двигателя Мп возрастает с увеличением сопротивления r2' до некоторого значении. На рисунке это соответствует сопротивлению г2'ш, при котором пусковой момент равен максимальному. При дальнейшем увеличении сопротивления r2' пусковой момент уменьшается. Анализ графиков М = f (s) приведенных на рис. 13.6, также показывает, что изменения сопротивления ротора r2' сопровождаются изменениями частоты вращения: с увеличением r2' при неизменном нагрузочном моменте Мст скольжение увеличивается, т.е. частота вращения уменьшается (точки 1, 2, 3 и 4).
Рис. 13.6. Влияние активного сопротивленияобмотки ротора на механическуюхарактеристику асинхронного двигателя
Влияние активного сопротивления обмотки ротора на форму механических характеристик асинхронных двигателей используется при проектировании двигателей. Например, асинхронные двигатели общего назначения должны иметь «жесткую» скоростную характеристику (см. рис. 13.7), т. е. работать с небольшим номинальным скольжением. Это достигается применением в двигателе обмотки ротора с малым активным сопротивлением r2'. При этом двигатель имеет более высокий КПД за счет снижения электрических потерь в обмотке ротора (Рэ2 = m1I/22).Выбранное значение г2' должно обеспечить двигателю требуемое значение пускового момента. При необходимости получить двигатель с повышенным значением пускового момента увеличивают активное сопротивление обмотки ротора. Но при этом получают двигатель с большим значением номинального скольжения, следовательно, с меньшим КПД. Рассмотренные зависимости M = f (U1) и М = f (r2') имеют также большое практическое значение при рассмотрении вопросов пуска и регулирования частоты вращения асинхронных двигателей (см. гл. 15). ГЛАВА 11 •Магнитная цепь асинхронной машины Основные понятия
Магнитодвижущая сила обмотки статора создает магнитный поток, который замыкается через элементы магнитной системы машины. Магнитную систему асинхронной машины называют неявнополюсной (рис. 11.1), так как она не имеет явно выраженных магнитных полюсов (сравните с рис. 20.1). Количество магнитных полюсов в неявнополюсной магнитной системе определяется числом полюсов в обмотке, возбуждающей магнитное поле, в данном случае в обмотке статора. Магнитная система машины, состоящая из сердечников статора и ротора, представляет собой разветвленную симметричную магнитную цепь. Например, магнитная система четырехполюсной машины состоит из четырех одинаковых ветвей, в каждой из которых замыкается половина магнитного потока одного полюса (рис. 11.1). В двухполюсной машине таких ветвей две, в шестиполюсной — шесть и т. д. Каждая из таких ветвей образует неразветвленную магнитную цепь, которая и является предметом расчета. На рис. 11.2 представлена магнитная цепь неявнополюсной машины. Здесь видны участки магнитной цепи: воздушный зазор δ, зубцовый слой статора hz1, зубцовый слой ротора hz1, спинка ротора Lc2, спинка статора Lc1. Замыкаясь в магнитной цепи, магнитный поток проходит воздушный зазор и зубцовые слои статора и ротора дважды. Каждый из перечисленных участков оказывавает магнитному потоку некоторое магнитное сопротивление. Поэтому на каждом участке магнитной цепи затрачивается часть МДС обмотки статора, называемая магнитным напряжением:
где Таким образом, расчет МДС обмотки статора на пару полюсов сводится к расчету магнитных напряжений на всех участках магнитной цепи. Полученное в результате расчета магнитной цепи значение МДС на пару полюсов
статора:
I1μ = Исходным параметром при расчете магнитной цепи асинхронного двигателя является максимальная магнитная индукция в воздушном зазоре Вδ. Величину Вδ принимают по рекомендуемым значениям в зависимости от наружного диаметра сердечника статора D1нар и числа полюсов 2р. Например при D1нар = 300
Рис. 11.1. Магнитное поле четырехполюсной Рис. 11.2. Магнитная цепь асинхронной машины асинхронной машины
Вδ = 0,80 Магнитная индукция Вδ определяет магнитную нагрузку двигателя: при слишком малом Вδ магнитная система двигателя недогружена, а поэтому габаритные размеры двигателя получаются неоправданно большими; если же задаться чрезмерно большим течением Вδ, то резко возрастут магнитные напряжения на участках магнитной системы, особенно в зубцовых слоях статора и ротopa, в результате возрастет намагничивающий ток статора I1μ снизится КПД двигателя (см. § 13.1). Для изготовления сердечников статора и ротора асинхронных двигателей обычно применяют холоднокатаные изотропные листовые электротехнические стали, обладающие одинаковой магнитной проводимостью вдоль и поперек проката листов (табл 11.1). Таблица 11.1
Расчет магнитной цепи асинхронного двигателя
Расчет магнитной цепи электрической машины состоит в основном в определении магнитных напряжений для всех ее участков. Магнитное напряжение Fx для любого участка магнитной цепи равно произведению напряженности поля на этом участке Нх на его длину lХ. Участки магнитной цепи различаются конфигурацией, размерами и материалом. Наибольшее магнитное напряжение в воздушном зазоре δ. Напряженность магнитного поля в воздушном зазоре Hδ = Bδ/ μ0, где μ0 = 4π/ 10-7 Гн/м. Расчетная длина зазора lδ = δkδ, где kδ, — коэффициент воздушного зазора, учитывающий увеличение магнитного сопротивления зазора, вызванное зубчатостью поверхностей статора и ротора, ограничивающих воздушный зазор в асинхронном двигателе (kδ > 1). Учитывая это, получим выражение магнитного напряжения воздушного зазора (А): Fδ = 0,8 Bδ δ kδ 103. (11.4) где δ — значение одностороннего воздушного зазора, мм. Обычно магнитное напряжение двух воздушных зазоров, входящих в расчетную часть магнитной цепи асинхронного двигателя (рис. 11.2), составляет — 85% от суммарной МДС на пару полюсов
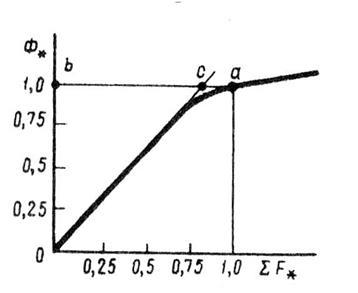
Рис. 11.3. Магнитная характеристика асинхронной машины
возрастает вероятность возникновения неравномерности зазора и, как следствие, вероятность задевания ротора о статор. Кроме воздушного зазора все остальные участки магнитной цепи двигателя выполнены из стали (зубцовые слои статора hz1 и ротора Lc2, спинки статора Lc1 и ротора Lc2). Непосредственный расчет магнитных напряжений для этих участков затруднен, так как из-за магнитного насыщения стали между напряженностью магнитного поля Нx и магнитной индукцией Вх нет прямой пропорциональности. Поэтому для определения напряженности Нх по полученному значению магнитной индукции Вх необходимо пользоваться таблицами намагничивания H = f(B) для данной марки электротехнической стали. Асинхронные двигатели проектируют таким образом, чтобы их магнитная система была магнитно насыщена. На рис. 11.3 представлена магнитная характеристика асинхронного двигателя Ф* = f( Степень насыщения магнитной цепи машины количественно характеризуется коэффициентом магнитного насыщения, который может быть определен по магнитной характеристике следующим образом. Из начала координат проводим прямую — касательную, к магнитной характеристике — до пересечения с отрезком bа в точке с (рис. 11.3). Коэффициент магнитного насыщения определяется как отношение отрезка bа, представляющего собой полную МДС ( собой магнитное напряжение удвоенного воздушного зазора (2Fδ* = 2Fδ / kμ = ba / bc = 1/ (2Fδ*) (11.5) Обычно для асинхронных машин kμ = 1,2
Пример 11.1. Воздушный зазор трехфазного асинхронного двигателя δ = 0,5 мм, максимальное значение магнитной индукции Вδ = 0,9 Тл. Обмотка статора четырехполюсная, число последовательно соединенных витков в обмотке одной фазы ω1 = 130, обмоточный коэффициент kоб1 = 0,91. Определить значение намагничивающего тока обмотки статора I1μ, если коэффициент воздушного зазора kδ = 1,38, а коэффициент магнитного насыщения kμ = 1,4. Решение. Магнитное напряжение воздушного зазора по (11.4) Fδ = 0,8 Вδ δ kδ • 103 = 0,8 • 0,9 • 0,5 • 1,38 • 103 = 497 A. Так как коэффициент магнитного насыщения kμ =
Намагничивающий ток статора по (11.2) I1μ = p Если воздушный зазор данного двигателя увеличить на 20%, т. е. принять δ = 0,6 мм (при прочих неизменных условиях), то намагничивающий ток статора станет равным I1μ = 10,4 А, т. е. он возрастет пропорционально увеличению воздушного зазора.   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 = 2Fδ + 2Fzl + 2Fz2 + Fcl+Fc2, (11.1)
= 2Fδ + 2Fzl + 2Fz2 + Fcl+Fc2, (11.1) (11.2)
(11.2) 800 мм рекомендуемые значения
800 мм рекомендуемые значения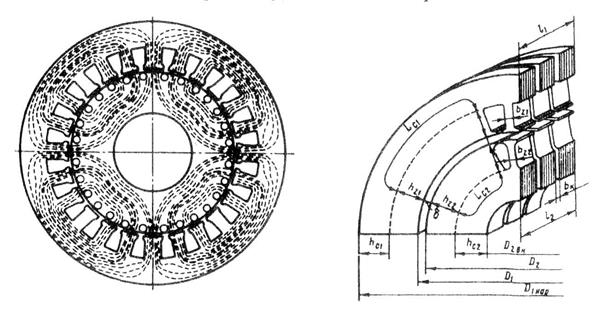

 м):
м): (13.19)
(13.19)
 = f (s) трехфазного асинхронного двигателя с короткозамкнутым ротором типа 4А160М4УЗ номинальной мощностью 18,5 кВт, напряжением 220/380 В, частотой вращения 1465 об/мин. Параметры схемы замещения этого двигателя: r1 = 0,263 Ом, x1 = 0,521 Ом, r/2 = 0,158 Ом, х/2 = 0,892 Ом. Перегрузочная способность двигателя λ = 2,3, кратность пускового момента Мп /Мном = 1,0.
= f (s) трехфазного асинхронного двигателя с короткозамкнутым ротором типа 4А160М4УЗ номинальной мощностью 18,5 кВт, напряжением 220/380 В, частотой вращения 1465 об/мин. Параметры схемы замещения этого двигателя: r1 = 0,263 Ом, x1 = 0,521 Ом, r/2 = 0,158 Ом, х/2 = 0,892 Ом. Перегрузочная способность двигателя λ = 2,3, кратность пускового момента Мп /Мном = 1,0. =121 Н
=121 Н  = 236 Н
= 236 Н  = 150 Н
= 150 Н  = 93,6 Н
= 93,6 Н  (13.21)
(13.21) ) (13.22)
) (13.22) ) = 0,100. Относительное значение момента M
) = 0,100. Относительное значение момента M  = 0,46;
= 0,46; =1;
=1; = 0,80;
= 0,80; = 0,47;
= 0,47; =0,28;
=0,28;

 ном / (2Fδ), то МДС обмотки статора в режиме х.х. на пару полюсов
ном / (2Fδ), то МДС обмотки статора в режиме х.х. на пару полюсов