|
|
Круговая диаграмма асинхронного двигателяСтр 1 из 6Следующая ⇒ ГЛАВА 14 • Опытное определение параметров и расчет рабочих характеристик асинхронных двигателей Основные понятия
Существует два метода получения данных для построения рабочих характеристик асинхронных двигателей: метод непосредственной нагрузки и косвенный метод. Метод непосредственной нагрузки заключается в опытном исследовании двигателя в диапазоне нагрузок от холостого хода до режима номинальной нагрузки с измерением необходимых параметров. Этот метод обычно применяется для двигателей мощностью не более 10—15 кВт. С ростом мощности двигателя усложняется задача его нагрузки, растут непроизводительный расход электроэнергии и загрузка электросети (исключение составляют установки, содержащие несколько электрических машин, включенных по схеме с частичным возвратом электроэнергии в сеть). Применение этого метода ограничивается еще и тем, что не всегда представляется возможным создать испытательную установку по причине отсутствия требуемого оборудования и недопустимости перегрузки электросети. Широкое применение получил более универсальный косвенный метод, применение которого не ограничивается мощностью двигателя. Этот метод заключается в выполнении двух экспериментов: опыта холостого хода и опыта короткого замыкания. Опыты х.х. и к.з. асинхронных двигателей в основном аналогичны таким же опытам трансформаторов (см. § 1.11). Но они имеют и некоторые особенности, обусловленные главным образом наличием у двигателя вращающейся части — ротора. Кроме того, при переходе из режима х.х. в режим к.з. параметры обмоток двигателя (активные и индуктивные сопротивления) не остаются неизменными, что объясняется зубчатой поверхностью статора и ротора. Все это создает некоторые затруднения в проведении опытов и в последующей обработке их результатов. Опыт холостого хода
Питание асинхронного двигателя при опыте х.х. осуществляется через индукционный регулятор напряжения ИР (рис. 14.1) или регулировочный автотрансформатор, позволяющие изменять напряжение в широких пределах. При этом вал двигателя должен быть свободным от механической нагрузки. Опыт начинают с повышенного напряжения питания U1 = 1,15 Uном, затем постепенно понижают напряжение до 0,4 Uном так, чтобы снять показания приборов в 5—7 точках. При этом один из замеров должен соответствовать номинальному напряжению U1ном. Измеряют линейные значения напряжений и токов и вычисляют их средние значения: Uср = (UАВ + UВС + UСА)/ 3 (14.1) I0ср = (IОА + IОВ + IOC)/ 3 (14.2) а затем в зависимости от схемы соединения обмотки статора определяют фазные значения напряжения и тока х.х.: при соединении в звезду U1 = Uср/ при соединении в треугольник U1 = Ucp; U0 = I0cp/
Рис. 14,1. Схема включения трехфазного асинхронного двигателя при опытах х.х. и к.з.
Ваттметр W измеряет активную мощность Р0, потребляемую двигателем в режиме х.х., которая включает в себя электрические потери в обмотке статора m1 I20 r1, магнитные потери в сердечнике статора Рми механические потери Рмех (Вт): Р0 = m1 I20 r1 + Рм + Рмех (14.5) Здесь r1 - активное сопротивление фазы обмотки статора (Ом), измеренное непосредственно после отключения двигателя от сети, чтобы обмотка не успела охладиться. Сумма магнитных и механических потерь двигателя (Вт) P/0 = Рм + Рмех = Р0 – m1 I20 r1 (14.6) Коэффициент мощности для режима х.х. cоs φ0 = Р0/ (m1 U1 I0). (14.7) По результатам измерений и вычислений строят характеристики х.х. I0, P0, P/0и соs φ0 = f (U1), на которых отмечают значения величин I0ном, Р0ном, Р/0ном и соs φ0 соответствующих номинальному напряжению U1ном(рис. 14.2). Если график Р/0 = f (U1) продолжить до пересечения с осью ординат (U1 = 0), то получим величину потерь Рмех. Это разделение магнитных и механических потерь основано на том, что при неизменной частоте сети f 1 частота вращения двигателя в режиме х.х. n0, а следовательно, и механические потери Рмех неизменны. В то же время магнитный поток Ф прямо пропорционален ЭДС статора Е1. Для режима х.х. U1 ≈ E1, а поэтому при U1 = 0 и магнитный поток Ф = 0, а следовательно, и магнитные потери Рм = 0. Определив величину механических потерь Рмех, можно вычислить магнитные потери (Вт): Рм = Р/0 – Рмех (14.8) Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют
Рис. 14.2. Характеристики х.х. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
коэффициент трансформации напряжений между обмотками статора и ротора. Этот коэффициент с достаточной точностью может быть определен по отношению средних арифметических линейных (междуфазовых) напряжений статора к аналогичным напряжениям ротора.
Опыт короткого замыкания Схема соединений асинхронного двигателя при опыте к.з. остается, как и в опыте х.х. (см. рис. 14.1). Но при этом измерительные приборы должны быть выбраны в соответствии с пределами измерения тока, напряжения и мощности. Ротор двигателя следует жестко закрепить, предварительно установив его в положение, соответствующее среднему току к.з. С этой целью к двигателю подводят небольшое напряжение (UK = 0,1Uном) и, медленно поворачивая ротор, следят за показанием амперметра, стрелка которого будет колебаться в зависимости от положения ротора двигателя. Объясняется это взаимным смещением зубцовых зон ротора и статора, вызывающего колебания индуктивных сопротивлений обмоток двигателя. Предельное значение тока статора при опыте к.з. устанавливают исходя из допустимой токовой нагрузки питающей сети и возможности провести опыт в минимальный срок, чтобы не вызвать опасного перегрева двигателя. Для двигателей мощностью до 1 кВт возможно проведение опыта начиная с номинального напряжения UK = 0,1Uном.В этом случае предельный ток Iк = (1,5 ÷ 2,5)х I1ном. Для двигателей большей мощности сила предельного тока Iк = (2,5 ÷ 5)х I1ном. При выполнении опыта к.з. в учебных целях можно ограничиться предельным током Iк = (1,5 ÷ 2,5)х I1ном. При выполнении опыта к.з. желательно соединение обмотки статора звездой. Определив диапазон изменения тока статора при опыте к.з., опыт начинают с предельного значения этого тока, установив на индукционном регуляторе соответствующее напряжение к.з. UK. Затем постепенно снижают это напряжение до значения, при котором ток Iк достигнет нижнего предела установленного диапазона его значений. При этом снимают показания приборов для 5—7 точек, одна из которых должна соответствовать номинальному току статора (IК = I1ном). Продолжительность опыта должна быть минимально возможной. С этой целью измеряют лишь одно линейное напряжение (например, UкАВ), так как некоторая несимметрия линейных напряжений при опыте к.з. не имеет значения. Линейные токи измеряют хотя бы в двух линейных проводах (например, IкА и IкВ). За расчетное значение тока к.з. принимают среднее арифметическое этих двух значений. После снятия последних показаний приборов двигатель следует отключить и сразу же произвести замер активного сопротивления фазы обмотки статора r/1,чтобы определить температуру обмотки. Линейные напряжения и токи пересчитывают на фазные Uк и Iк по формулам, аналогичным (14.3) и (14.4). Ваттметр W измеряет активную мощность к.з. Pк По полученным значениям напряжений UK,токов Iк и мощностей Рквычисляют следующие параметры: коэффициент мощности при к.з. cos φк = Pк (m1 Uк Iк);(14.9) полное сопротивление к.з. (Ом) zк = Uк / Iк; (14.10) активные и индуктивные составляющие этого сопротивления (Ом) rк = rк соs φк; (14.11) xк = Измеренные и вычисленные величины заносят в таблицу, а затем строят характеристики к.з.: Iк; Рк и cos φк = f (Uк) (рис. 14.3). При опыте к.з. обмотки двигателя быстро нагреваются до рабочей температуры, так как при неподвижном роторе двигатель не вентилируется. Температуру (°С) обмотки Θ1, обычно определяют по сопротивлению фазы r/2, измеренному непосредственно после
Рис. 14.3. Характеристики к.з. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
проведения опыта, по формуле Θ1 = [(r/1 – r1.20)(255/r1.20) ] + 20, (14.13) где — r1.20 сопротивление фазы обмотки статора в холодном состоянии (обычно при температуре 20 °С), Ом. Если же температура обмотки оказалась меньше расчетной рабочей температуры Θ2 для соответствующего класса нагревостойкости изоляции двигателя (см. § 8.4), то активное сопротивление к.з. кк (Ом) пересчитывают на рабочую температуру: rк = r/к [1 + α(Θ2 – Θ1)] (14.14) где rк' - активное сопротивление к.з. при температуре Θ1 отличающейся от расчетной рабочей; α = 0,004. Затем пересчитывают на рабочую температуру полное сопротивление к.з. zk = На характеристиках к.з. (рис. 14.3) отмечают значения величин Рк.ном, Uк.ном, соответствующих току к.з. Iк = I1ном. Ток и мощность к.з. пересчитывают на номинальное напряжение U1ном: I/к = Iп ≈ I1ном (U1ном / Uк.ном); (14.15) Р/к ≈ Рк.ном (U1ном / Uк.ном)2 (14.16) Следует иметь в виду, что такой пересчет является приближенным, так как при UK = U1ном наступает магнитное насыщение сердечников (особенно зубцовых слоев) статора и ротора; это приводит к уменьшению индуктивного сопротивления хк, что не учитывается формулами (14.15) и (14.16). Кратность пускового тока равна Iп /Iном. Электромагнитная мощность в режиме к.з., передаваемая на ротор двигателя, равна электрическим потерям в обмотке ротора РЭ2к, поэтому электромагнитный момент при опыте к.з. (Н Мк ≈ Мп = Pэ2к /ω1 = (Рк.ном - Рэ1к - Рм.к)/ω1, где Рэ1к = m1 I2к.ном r1 — электрические потери в обмотке статора при опыте к.з. Магнитные потери при опыте к.з. Рм.к приближенно определяют по характеристикам х.х. (см. рис. 14.2) при напряжении U1 = UK. В режиме х.х. магнитный поток Ф больше, чем в режиме к.з., но если в режиме х.х. магнитные потери происходят только в сердечнике статора (см. § 13.1), то в режиме к.з. (s = 1) магнитные потери происходят еще и в сердечнике ротора, так как f 2 = f 1. Начальный пусковой момент получают пересчетом момента Мк на начальный пусковой ток Iп: Мп ≈ МК (IП/ IК)2. Затем определяют кратность пускового момента Мп/ Мном. Рис 14.5. К обоснованию круговой диаграммы асинхронного двигателя
воспользоваться результатами опытов х.х. и к.з. Круговую диаграмму строят в следующем порядке. Проводят оси координат и на оси ординат строят вектор напряжения Di = (U1/xк)/ mi. (14-17)
Рис 14.6. Круговая диаграмма асинхронного двигателя
Для обеспечения достаточной точности при последующем использовании круговой диаграммы следует принять масштаб тока mi - таким, чтобы диаметр Di был не менее 200 мм, при этом все построения следует вести остро отточенным карандашом. Разделив отрезок НСна две равные части, получаем точку О1,из которой радиусом Di/ 2 проводим полуокружность. Затем из точки Н в масштабе токов проводят дугу радиусом, эквивалентным току к.з. Iк.ном. В месте пересечения этой дуги и полуокружности токов получаем точку К, называемую точкой к.з.Соединив точки Н и К, получаем вектор тока короткого замыкания На средней части отрезка О1Сотмечаем точку F, в которой восставляем перпендикуляр к диаметру НС. На этом перпендикуляре отмечаем отрезок FF1 = HF(r1/ xк). (14.18) Из точки Н через точку F1 проводим прямую до пересечения с окружностью в точке Т.Точка Т соответствует скольжению s = ± ∞ (ротор вращается по часовой стрелке или против нее с бесконечно большой скоростью). Таким образом, на круговой диаграмме отмечены три характерные точки: Н (s = 0), К(s = 1) и Т (s = ± ∞). Между этими точками расположены три зоны возможных режимов асинхронной машины. При обходе окружности токов по часовой стрелке этим режимам соответствуют: а) дуга НК— двигательный режим (s = 0 ÷ 1); б) дуга КТ— тормозной режим (s= 1 ÷ ∞); в) дуга ТСН (включая не показанную на рис. 14.6 нижнюю полуокружность) — генераторный режим (s = - ∞ ÷ 0). Соединив точки Ни К,получим линию полезной мощности НК, соединив точки Н к Т, получим линию электромагнитной мощности НТ. Точка Е на круговой диаграмме соответствует максимальному моменту, т. е. критическому скольжению sкр. Положение этой точки определяется следующим образом: из точки О1опускают перпендикуляр на линию электромагнитной мощности НТи продолжают его до пересечения с окружностью токов в точке Е. Рассматриваемая круговая диаграмма является упрощенной, так как она построена при предположении постоянства активных и индуктивных сопротивлений схемы замещения асинхронного двигателя. Однако эти сопротивления при изменениях нагрузки двигателя меняют свои значения. Объясняется это тем, что с ростом нагрузки усиливается магнитное насыщение зубцовых слоев статора и ротора, что ведет к уменьшению индуктивных сопротивлений х1, хmи х'2. Кроме того, рост нагрузки двигателя сопровождается увеличением скольжения, а следовательно, и увеличением частоты тока в обмотке ротора. Это является причиной усиления эффекта вытеснения тока [см. § 15.3] - явления, вызывающего увеличение активного сопротивления обмотки ротора r2'. Практика применения упрощенной круговой диаграммы показывает, что ошибка от применения упрощенной круговой диаграммы становится заметной при скольжениях s > sкр,а при скольжениях, превышающих 0,4—0,5, эта ошибка недопустима. Таблица 14.1
Контрольные вопросы 1.Какие существуют методы получения данных для построения рабочих характеристик асинхронных двигателей? 2.Чем ограничивается применение метода непосредственной нагрузки? 3.Как определить величину механических и магнитных потерь двигателя по характеристикам х.х.?
ГЛАВА 15 • Пуск и регулирование частоты вращения трехфазных асинхронных двигателей Рис. 15.1. Зависимость пускового момента от активного сопротивления цепи ротора
приведенное к обмотке статора. Влияние возросшего значения активного сопротивления на пусковой момент двигателя Мп следует из (13.19). Это влияние графически показано на рис. 15.1, из которого видно, что если при отсутствии ПР, т. е. при активном сопротивлении цепи ротора R2 = r2, пусковой момент Мп = Мпо, то при введении в цепь ротора добавочного активного сопротивления rдоб, когда R/2 = r2' + rдоб', пусковой момент возрастает и при R//2 = r2' + rдоб' = х1 + х'2 достигает наибольшего значения Мп.наиб. При R/2 > х1 + х'2 пусковой момент уменьшается. При выборе сопротивления пускового реостата rдоб исходят из условий пуска двигателя: если двигатель включают при значительном нагрузочном моменте на валу, сопротивление пускового реостата rдо6 выбирают таким, чтобы обеспечить наибольший пусковой момент (см. график при r/2Ш на рис. 13.6); если же двигатель включают при небольшом нагрузочном моменте на валу, когда пусковой момент не имеет решающего значения для пуска, оказывается целесообразным сопротивление ПР rдоб выбирать несколько больше значения, соответствующего наибольшему пусковому моменту, т. е. чтобы R/2 > x1 + х'2. В этом случае пусковой момент оказывается несколько меньшим наибольшего значения М п.mах, но зато пусковой ток значительно уменьшается (см. график при r'2IV на рис. 13.6). На рис. 15.2, а показана схема включения ПР в цепь фазного ротора. В процессе пуска двигателя ступени ПР переключают таким образом, чтобы ток ротора оставался приблизительно неизменным, а среднее значение пускового момента было близко к наибольшему. На рис. 15.2, бпредставлен график изменения пускового момента асинхронного двигателя при четырех ступенях пускового реостата. Так, в начальный момент пуска (первая ступень реостата) пусковой момент равен Мп.maх. По мере разгона двигателя его момент уменьшается по кривой 1. Как только значение момента уменьшится до значения Мп.minрычаг реостата переводят на вторую ступень и сопротивление реостата
Рис. 15.2. Схема включения пускового реостата (а) и построение графика пускового момента (б) асинхронного двигателя с фазным ротором
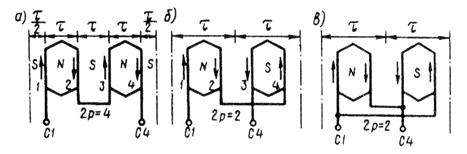
уменьшается. Теперь зависимость М = f (s) выражается кривой 2и пусковой момент двигателя вновь достигает Мп.mах. Затем ПР переключают на третью и на четвертую ступени (кривые 3 и 4).После того как электромагнитный момент двигателя уменьшится до значения, равного значению противодействующего момента на валу двигателя, частота вращения ротора достигнет установившегося значения и процесс пуска двигателя будет закончен. Таким образом, в течение всего процесса пуска значение пускового момента остается приблизительно постоянным, равным Мп.ср. Следует иметь в виду, что при слишком быстром переключении ступеней реостата пусковой ток может достигнуть недопустимо больших значений. Пусковые реостаты состоят из кожуха, рычага с переключающим устройством и сопротивлений, выполненных из металлической проволоки или ленты, намотанной в виде спирали, или же из чугунного литья. Пусковые реостаты рассчитаны на кратковременное протекание тока, а поэтому рычаг пускового реостата нельзя долго задерживать на промежуточных ступенях, так как сопротивления реостата могут перегореть. По окончании процесса пуска, когда рычаг реостата находится на последней ступени, обмотка ротора замкнута накоротко. В заключение отметим, что в асинхронных двигателях с фазным ротором обеспечивается наиболее благоприятное соотношение между пусковым моментом и пусковым током: большой пусковой момент при небольшом пусковом токе (в 2—3 раза больше номинального). Недостатками пусковых свойств двигателей с фазным ротором являются некоторая сложность, продолжительность и неэкономичность пусковой операции. Последнее вызывается необходимостью применения в схеме двигателя пускового реостата и непроизводительным расходом электроэнергии при его нагреве. Использование асинхронных двигателей, укомплектованных такими устройствами для частотного регулирования, наиболее целесообразно в пожаро- и взрывоопасных средах (химическая и нефтеперерабатывающая промышленность), где применение коллекторных двигателей (см. гл. 29) недопустимо. Регулирование частоты вращения изменением числа полюсов обмотки статора. Этот способ регулирования частоты вращения дает ступенчатую регулировку. Так, при f 1 =50 Гц и р = 1÷5 пар полюсов можно получить следующие синхронные частоты вращения: 3000, 1500, 1000, 750, 600 об/мин. Изменять число полюсов в обмотке статора можно либо укладкой на статоре двух обмоток с разным числом полюсов, либо укладкой на статоре одной обмотки, конструкция которой позволяет путем переключения катушечных групп получать различное число полюсов. Последний способ получил наибольшее применение. Принцип преобразования четырехполюсной обмотки в двухполюсную (для одной фазы) показан на рис. 15.12: при последовательном согласном соединении двух катушек возбуждаемое ими магнитное поле образует четыре полюса (рис. 15.12, а); при последовательном встречном (рис. 15.12, б) или параллельном соединениях (рис. 15.12, в) — два полюса. Таким образом, принцип образования полюсно переключаемой обмотки основан на том, что каждая фаза обмотки делится на части (катушечные группы), изменяя
Рис 15.12. Схемы включения обмотки статора на разное число полюсов
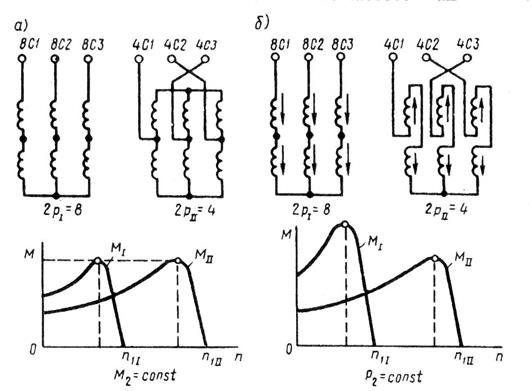
схему соединения которых получают разное число полюсов. Возможны два режима работы асинхронных двигателей с полюсно переключаемыми обмотками: режим постоянного момента (рис. 15.13, а) — при переключении двигателя с одной частоты вращения на другую вращающий момент на валу двигателя М2 остается неизменным, а мощность Р2 изменяется пропорционально частоте вращения n2:
Рис. 15.13. Схемы переключения числа полюсов и механические характеристики в режимах постоянного момента (а) и постоянной скорости (б)
Р2 = 0,105 М2 n2 (15.7) режим постоянной мощности (рис. 15.13, б) — при переключении двигателя с одной частоты вращения на другую мощность P2 остается примерно одинаковой, а момент на валу M2 изменяется соответственно изменению частоты вращения n2: М2 = 9,55 Р2/ n2. (15.8) Если на статоре расположить две полюсно переключаемые обмотки, то получим четырехскоростной двигатель. Однако возможно применение и одной обмотки, допускающей путем переключения катушечных групп получение до четырех вариантов различных чисел полюсов. Например, асинхронный двигатель типа 4А180М12/8/6/4 имеет на статоре обмотку, допускающую переключение на 12,8,6,4 полюса. Регулирование частоты вращения изменением числа полюсов на статоре применяют исключительно в асинхронных двигателях с короткозамкнутым ротором, так как число полюсов в обмотке этого ротора всегда равно числу полюсов статора и для изменения частоты вращения достаточно изменить число полюсов в обмотке ротора. В случае же фазного ротора пришлось бы и на роторе применить полюсно переключаемую обмотку, что привело бы к недопустимому усложнению двигателя. Контрольные вопросы 1. Какими показателями характеризуются пусковые свойства асинхронных двигателей? 2. Каковы достоинства и недостатки пусковых свойств асинхронных двигателей? 3. Как лучше, с точки зрения улучшения пусковых свойств, уменьшить пусковой ток: снижением подводимого к двигателю напряжения или увеличением активного сопротивления в цепи обмотки ротора? 4. Каковы достоинства и недостатки пуска асинхронных двигателей непосредственным включением в сеть? 5. Какие существуют способы пуска асинхронных двигателей при пониженном напряжении? 6. В чем сущность эффекта вытеснения тока и почему он возникает при пуске двигателя и почти исчезает при его работе? 7. Почему бутылочная форма паза ротора способствует лучшему проявлению эффекта вытеснения тока? 8. Перечислите способы регулирования частоты вращения асинхронных двигателей и дайте им сравнительную оценку. 9. Почему при частотном регулировании частоты вращения одновременно с частотой тока необходимо изменять напряжение? ГЛАВА 14 • Опытное определение параметров и расчет рабочих характеристик асинхронных двигателей Основные понятия
Существует два метода получения данных для построения рабочих характеристик асинхронных двигателей: метод непосредственной нагрузки и косвенный метод. Метод непосредственной нагрузки заключается в опытном исследовании двигателя в диапазоне нагрузок от холостого хода до режима номинальной нагрузки с измерением необходимых параметров. Этот метод обычно применяется для двигателей мощностью не более 10—15 кВт. С ростом мощности двигателя усложняется задача его нагрузки, растут непроизводительный расход электроэнергии и загрузка электросети (исключение составляют установки, содержащие несколько электрических машин, включенных по схеме с частичным возвратом электроэнергии в сеть). Применение этого метода ограничивается еще и тем, что не всегда представляется возможным создать испытательную установку по причине отсутствия требуемого оборудования и недопустимости перегрузки электросети. Широкое применение получил более универсальный косвенный метод, применение которого не ограничивается мощностью двигателя. Этот метод заключается в выполнении двух экспериментов: опыта холостого хода и опыта короткого замыкания. Опыты х.х. и к.з. асинхронных двигателей в основном аналогичны таким же опытам трансформаторов (см. § 1.11). Но они имеют и некоторые особенности, обусловленные главным образом наличием у двигателя вращающейся части — ротора. Кроме того, при переходе из режима х.х. в режим к.з. параметры обмоток двигателя (активные и индуктивные сопротивления) не остаются неизменными, что объясняется зубчатой поверхностью статора и ротора. Все это создает некоторые затруднения в проведении опытов и в последующей обработке их результатов. Опыт холостого хода
Питание асинхронного двигателя при опыте х.х. осуществляется через индукционный регулятор напряжения ИР (рис. 14.1) или регулировочный автотрансформатор, позволяющие изменять напряжение в широких пределах. При этом вал двигателя должен быть свободным от механической нагрузки. Опыт начинают с повышенного напряжения питания U1 = 1,15 Uном, затем постепенно понижают напряжение до 0,4 Uном так, чтобы снять показания приборов в 5—7 точках. При этом один из замеров должен соответствовать номинальному напряжению U1ном. Измеряют линейные значения напряжений и токов и вычисляют их средние значения: Uср = (UАВ + UВС + UСА)/ 3 (14.1) I0ср = (IОА + IОВ + IOC)/ 3 (14.2) а затем в зависимости от схемы соединения обмотки статора определяют фазные значения напряжения и тока х.х.: при соединении в звезду U1 = Uср/ при соединении в треугольник U1 = Ucp; U0 = I0cp/
Рис. 14,1. Схема включения трехфазного асинхронного двигателя при опытах х.х. и к.з.
Ваттметр W измеряет активную мощность Р0, потребляемую двигателем в режиме х.х., которая включает в себя электрические потери в обмотке статора m1 I20 r1, магнитные потери в сердечнике статора Рми механические потери Рмех (Вт): Р0 = m1 I20 r1 + Рм + Рмех (14.5) Здесь r1 - активное сопротивление фазы обмотки статора (Ом), измеренное непосредственно после отключения двигателя от сети, чтобы обмотка не успела охладиться. Сумма магнитных и механических потерь двигателя (Вт) P/0 = Рм + Рмех = Р0 – m1 I20 r1 (14.6) Коэффициент мощности для режима х.х. cоs φ0 = Р0/ (m1 U1 I0). (14.7) По результатам измерений и вычислений строят характеристики х.х. I0, P0, P/0и соs φ0 = f (U1), на которых отмечают значения величин I0ном, Р0ном, Р/0ном и соs φ0 соответствующих номинальному напряжению U1ном(рис. 14.2). Если график Р/0 = f (U1) продолжить до пересечения с осью ординат (U1 = 0), то получим величину потерь Рмех. Это разделение магнитных и механических потерь основано на том, что при неизменной частоте сети f 1 частота вращения двигателя в режиме х.х. n0, а следовательно, и механические потери Рмех неизменны. В то же время магнитный поток Ф прямо пропорционален ЭДС статора Е1. Для режима х.х. U1 ≈ E1, а поэтому при U1 = 0 и магнитный поток Ф = 0, а следовательно, и магнитные потери Рм = 0. Определив величину механических потерь Рмех, можно вычислить магнитные потери (Вт): Рм = Р/0 – Рмех (14.8) Для асинхронных двигателей с фазным ротором в опыте холостого хода определяют
Рис. 14.2. Характеристики х.х. трехфазного асинхронного двигателя (3,0 кВт, 220/380 В, 1430 об/мин)
коэффициент трансформации напряжений между обмотками статора и ротора. Этот коэффициент с достаточной точностью может быть определен по отношению средних арифметических линейных (междуфазовых) напряжений статора к аналогичным напряжениям ротора.
Опыт короткого замыкания Схема соединений асинхронного двигателя при опыте к.з. остается, как и в опыте х.х. (см. рис. 14.1). Но при этом измерительные приборы должны быть выбраны в соответствии с пределами измерения тока, напряжения и мощности. Ротор двигателя следует жестко закрепить, предварительно установив его в положение, соответствующее среднему току к.з. С этой целью к двигателю подводят небольшое напряжение (UK = 0,1Uном) и, медленно поворачивая ротор, следят за показанием амперметра, стрелка которого будет колебаться в зависимости от положения ротора двигателя. Объясняется это взаимным смещением зубцовых зон ротора и статора, вызывающего колебания индуктивных сопротивлений обмоток двигателя. Предельное значение тока статора при опыте к.з. устанавливают исходя из допустимой токовой нагрузки питающей сети и возможности провести опыт в минимальный срок, чтобы не вызвать опасного перегрева двигателя. Для двигателей мощностью до 1 кВт возможно проведение опыта начиная с номинального напряжения UK = 0,1Uном.В этом случае предельный ток Iк = (1,5 ÷ 2,5)х I1ном. Для двигателей большей мощности сила предельного тока Iк = (2,5 ÷ 5)х I1ном. При выполнении опыта к.з. в учебных целях можно ограничиться предельным током Iк = (1,5 ÷ 2,5)х I1ном. При выполнении опыта к.з. желательно соединение обмотки статора звездой. Определив диапазон изменения тока статора при опыте к.з., опыт начинают с предельного значения этого тока, установив на индукционном регуляторе соответствующее напряжение к.з. UK. Затем постепенно снижают это напряжение до значения, при котором ток Iк достигнет нижнего предела установленного диапазона его значений. При этом снимают показания приборов для 5—7 точек, одна из которых должна соответствовать номинальному току статора (IК = I1ном). Продолжительность опыта должна быть минимально возможной. С этой целью измеряют лишь одно линейное напряжение (например, UкАВ), так как некоторая несимметрия линейных напряжений при опыте к.з. не имеет значения. Линейные токи измеряют хотя бы в двух линейных проводах (например, IкА и IкВ). За расчетное значение тока к.з. принимают среднее арифметическое этих двух значений. После снятия последних показаний приборов двигатель следует отключить и сразу же произвести замер активного сопротивления фазы обмотки статора r/1,чтобы определить температуру обмотки. Линейные напряжения и токи пересчитывают на фазные Uк и Iк по формулам, аналогичным (14.3) и (14.4). Ваттметр W измеряет активну   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ; I0 = Iср (14.3)
; I0 = Iср (14.3)

 (14.12)
(14.12)
 , напряжение к.з. Uк = Iк zk и мощность к.з. Рк = m1 I2к rк.
, напряжение к.з. Uк = Iк zk и мощность к.з. Рк = m1 I2к rк. м)
м) (рис. 14.6). Выбрав масштаб тока m1 (А/мм), проводят вектор тока I0 (отрезок ОН ) под углом φ0 к оси ординат. Из точки H, называемой точкой х.х., соответствующей скольжению s = 0, проводят прямую, параллельную оси абсцисс, на которой откладывают отрезок НС,равный диаметру окружности токов (мм)
(рис. 14.6). Выбрав масштаб тока m1 (А/мм), проводят вектор тока I0 (отрезок ОН ) под углом φ0 к оси ординат. Из точки H, называемой точкой х.х., соответствующей скольжению s = 0, проводят прямую, параллельную оси абсцисс, на которой откладывают отрезок НС,равный диаметру окружности токов (мм)
 = Iп. Точке Кна диаграмме соответствует скольжение s= 1.
= Iп. Точке Кна диаграмме соответствует скольжение s= 1. , Ом
, Ом
 , A
, A