|
|
Порты в качестве универсального цифрового ввода-выводаСтр 1 из 9Следующая ⇒ Лекция № Программная модель МК Файл регистров общего назначения. Файл регистров оптимизирован под расширенный набор инструкций AVR-микроконтроллеров. В целях достижения требуемой производительности и гибкости файлом регистров поддерживаются следующие схемы ввода-вывода: · Один 8-разрядный операнд и один 8-разрядный результат. · Два 8-разрядных операнда и один 8- разрядный результат. · Два 8- разрядных операнда и один 16- разрядный результат. · Один 16- разрядный операнд и один 16- разрядный результат. Регистр статуса SREG Регистр статуса содержит информацию о результате только что выполненной арифметической инструкции. Данная информация может использоваться для ветвления программы по условию. Следует понимать, что регистр статуса обновляется после выполнения всех операций АЛУ в объеме, предусмотренном для каждой конкретной инструкции (см. раздел Флаги в таблице инструкций). Флаги этого регистра в большинстве случаев позволяют отказаться от использования инструкций сравнения, делая код программы более компактным и быстрым. Обратите внимание, что состояние регистра статуса автоматически не запоминается при вызове процедуры обработки прерываний и не восстанавливается при выходе из нее. Это необходимо выполнить программно. Регистр статуса – SREG. Регистр статуса - SREG - размещен в пространстве I/O по адресу $3F ($5F) и его биты определяются как: Bit 7 - I: Разрешение глобального прерывания. Бит разрешения глобального прерывания для разрешения прерывания должен быть установлен в состояние 1. Управление разрешением конкретного прерывания выполняется регистрами маски прерывания GIMSK и TIMSK. Если бит глобального прерывания очищен (в состоянии 0), то ни одно из разрешений конкретных прерываний, установленных в регистрах GIMSK и TIMSK, не действует. Бит I аппаратно очищается после прерывания и устанавливается для последующего разрешения глобального прерывания командой RETI. Бит I может также сбрасываться и устанавливаться с помощью инструкций CLI и SEI, соответственно. Bit 6 - T: Бит сохранения копии. Команды копирования бита BLD (Bit LoaD) и BST (Bit STore) используют бит T как бит источник и бит назначения при операциях с битами. Командой BST бит регистра регистрового файла копируется в бит T, командой BLD бит T копируется в регистр регистрового файла. Bit 5 - H: Флаг полупереноса. Данный флаг устанавливается при выполнении некоторых арифметических инструкций и индицирует о возникновении половинного переноса. Как правило половинный перенос широко используется в двоично-десятичной арифметике. Более подробная информация приведена в описании набора инструкций. Bit 4 - S: S = N V - Бит знака. Бит S всегда находится в состоянии, определяемом логическим исключающим ИЛИ (exclusive OR) между флагом отрицательного значения N и дополнением до двух флага переполнения V. Bit 3 - V: Флаг переполнения двоичного дополнения. Флаг переполнения двоичного дополнения V поддерживает арифметику с двоичным дополнением. Более подробная информация приведена в описании набора инструкций. Bit 2 - N: Флаг отрицательного значения. Флаг отрицательного результата N индицирует, что результатом выполнения арифметической или логической операции является отрицательное значение. Более подробная информация приведена в описании набора инструкций. Bit 1 - Z: Флаг нулевого значения. Флаг нулевого результата Z индицирует, что результатом выполнения арифметической или логической операции является ноль. Более подробная информация приведена в описании набора инструкций. Bit 0 - C: Флаг переноса. Флаг переноса C индицирует о возникновении переноса в результате выполнения арифметической или логической операции. Указатель стека - Stack Pointer – SP. Микроконтроллеры AVR оснащены 16-разрядным указателем стека, размещенным в двух регистрах пространства I/O по адресам $3E ($5E) и $3D ($5D). Поскольку микроконтроллеры ATmega128, ATmega603/103 поддерживают объем SRAM до 64 Кбайт, то используются все 16 разрядов указателя стека. Указатель стека указывает на область в SRAM данных, в которой размещаются стеки подпрограмм и прерываний. Объем стека в SRAM данных должен задаваться программой перед каждым вызовом подпрограммы и обработкой разрешенного прерывания. Указатель стека декрементируется на единицу, при каждом занесении командой PUSH данных в стек, и на две единицы при занесении данных в стек подпрограммой CALL и прерыванием. Указатель стека инкрементируется на единицу, при извлечении данных из стека командой POP, и на две единицы при извлечении данных из стека при возврате из подпрограммы (RET) или возврате из прерывания (IRET).
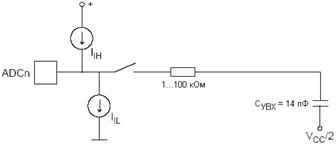
Порты Ввода-Вывода Все порты ввода-вывода (ПВВ) AVR-микроконтроллеров работают по принципу чтение-модификация-запись при использовании их в качестве портов универсального ввода-вывода. Это означает, что изменение направления ввода-вывода одной линии порта командами SBI и CBI будет происходит без ложных изменений направления ввода-вывода других линий порта. Данное распространяется также и на изменение логического уровня (если линия порта настроена на вывод) или на включение/отключение подтягивающих резисторов (если линия настроена на ввод). Каждый выходной буфер имеет симметричную характеристику управления с высоким втекающим и вытекающим выходными токами. Выходной драйвер обладает нагрузочной способностью, которая позволяет непосредственно управлять светодиодными индикаторами. Ко всем линиям портов может быть подключен индивидуальный выборочный подтягивающий к плюсу питания резистор, сопротивление которого не зависит от напряжения питания. На всех линиях ПВВ установлены защитные диоды, которые подключены к VCC и Общему (GND). Для каждого порта ввода-вывода в памяти ввода-вывода зарезервировано три ячейки: одна под регистр данных – PORTx, другая под регистр направления данных – DDRx и третья под состояние входов порта – PINx. Ячейка, хранящая состояние на входах портов, доступна только для чтения, а регистры данных и направления данных имеют двунаправленный доступ. Кроме того, установка бита выключения подтягивающих резисторов PUD регистра SFIOR отключает функцию подтягивания на всех выводах всех портов. Ниже приведено описание порта ввода-вывода для универсального цифрового ввода-вывода. Большинство выводов портов поддерживают альтернативные функции встроенных периферийных устройств микроконтроллера. Обратите внимание, что для некоторых портов разрешение альтернативных функций некоторых выводов делает невозможным использование других выводов для универсального цифрового ввода-вывода. Лекция № Регистр адреса EEPROM- EEARH, EEARL Посредством регистров адреса EEARH и EEARL определяется адрес в пространстве адресов EEPROM. Байты данных EEPROM адресуются линейно в пределах допустимого объема памяти для данного МК. Лекция № Запуск преобразования Одиночное преобразование запускается путем записи лог. 1 в бит запуска преобразования АЦП ADSC. Данный бит остается в высоком состоянии в процессе преобразования и сбрасывается по завершении преобразования. Если в процессе преобразования переключается канал аналогового ввода, то АЦП автоматически завершит текущее преобразование прежде, чем переключит канал. В режиме автоматического перезапуска АЦП непрерывно оцифровывает аналоговый сигнал и обновляет регистр данных АЦП. Данный режим задается путем записи лог. 1 в бит ADFR регистра ADCSRA. Первое преобразование инициируется путем записи лог. 1 в бит ADSC регистра ADCSRA. В данном режиме АЦП выполняет последовательные преобразования, независимо от того сбрасывается флаг прерывания АЦП ADIF или нет. Изменение канала или выбор опорного источника. Биты MUXn и REFS1:0 в регистре ADMUX поддерживают одноступенчатую буферизацию через временный регистр. Этим гарантируется, что новые настройки канала преобразования и опорного источника вступят в силу в безопасный момент для преобразования. До начала преобразования любые изменения канала и опорного источника вступаю в силу сразу после их модификации. Как только начинается процесс преобразования доступ к изменению канала и опорного источника блокируется, чем гарантируется достаточность времени на преобразование для АЦП. Непрерывность модификации возвращается на последнем такте АЦП перед завершением преобразования (перед установкой флага ADIF в регистре ADCSRA). Обратите внимание, что преобразование начинается следующим нарастающим фронтом тактового сигнала АЦП после записи ADSC. Таким образом, пользователю не рекомендуется записывать новое значение канала или опорного источника в ADMUX до 1-го такта синхронизации АЦП после записи ADSC. Особые меры необходимо предпринять при изменении дифференциального канала. Как только осуществлен выбор дифференциального канала усилительному каскаду требуется 125 мкс для стабилизации нового значения. Следовательно, в течение первых после переключения дифференциального канала 125 мкс не должно стартовать преобразование. Если же в этот период преобразования все-таки выполнялись, то их результат необходимо игнорировать. Такую же задержку на установление необходимо ввести при первом дифференциальном преобразовании после изменения опорного источника АЦП (за счет изменения бит REFS1:0 в ADMUX). Если разрешена работа интерфейса JTAG, то функции каналов АЦП на выводах порта F 7…4 отменяется. Входные каналы АЦП. При переключении входного канала необходимо учесть некоторые рекомендации, которые исключат некорректность переключения. В режиме одиночного преобразования переключение канала необходимо выполнять перед началом преобразования. Переключение канала может произойти только в течение одного такта синхронизации АЦП после записи лог. 1 в ADSC. Однако самым простым методом является ожидание завершения преобразования перед выбором нового канала. В режиме автоматического перезапуска канал необходимо выбирать перед началом первого преобразования. Переключение канала происходит аналогично - в течение одного такта синхронизации АЦП после записи лог. 1 в ADSC. Но самым простым методом является ожидание завершения первого преобразования, а затем переключение канала. Поскольку следующее преобразование уже запущено автоматически, то следующий результат будет соответствовать предыдущему каналу. Последующие преобразования отражают результат для нового канала. При переключении на дифференциальный канал первое преобразование будет характеризоваться плохой точностью из-за переходного процесса в схеме автоматической регулировки смещения. Следовательно, первый результат такого преобразования рекомендуется игнорировать. Источник опорного напряжения АЦП. Источник опорного напряжения (ИОН) для АЦП (VИОН) определяет диапазон преобразования АЦП. Если уровень однополярного сигнала выше VИОН, то результатом преобразования будет 0x3FF. В качестве VИОН могут выступать AVCC, внутренний ИОН 2,56В или внешний ИОН, подключенный к выводу AREF. AVCC подключается к АЦП через пассивный ключ. Внутреннее опорное напряжение 2,56В генерируется внутренним эталонным источником VBG, буферизованного внутренним усилителем. В любом случае внешний вывод AREF связан непосредственно с АЦП и, поэтому, можно снизить влияние шумов на опорный источник за счет подключения конденсатора между выводом AREF и общим. Напряжение VИОН также может быть измерено на выводе AREF высокоомным вольтметром. Обратите внимание, что VИОН является высокоомным источником и, поэтому, внешне к нему может быть подключена только емкостная нагрузка. Если пользователь использует внешний опорный источник, подключенный к выводу AREF, то не допускается использование другой опции опорного источника, т.к. это приведет к шунтированию внешнего опорного напряжения. Если к выводу AREF не приложено напряжение, то пользователь может выбрать AVCC и 2.56В качестве опорного источника. Результат первого преобразования после переключения опорного источника может характеризоваться плохой точностью и пользователю рекомендуется его игнорировать. Подавитель шумов АЦП. АЦП характеризуется возможностью подавления шумов, которые вызваны работой ядра CPU и периферийных устройств ввода-вывода. Подавитель шумов может быть использован в режиме снижения шумов АЦП и в режиме холостого хода. При использовании данной функции необходимо придерживаться следующей процедуры: 1. Убедитесь, что работа АЦП разрешена и он не выполняет преобразования. Выберите режим одиночного преобразования и разрешите прерывание по завершении преобразования. 2. Введите режим уменьшения шумов АЦП (или режим холостого хода). АЦП запустит преобразование, как только остановится CPU. 3. Если до завершения преобразования не возникает других прерываний, то АЦП вызовет прерывание CPU и программа перейдет на вектор обработки прерывания по завершении преобразования АЦП. Если до завершения преобразования другое прерывание пробуждает микроконтроллер, то это прерывание обрабатывается, а по завершении преобразования генерируется соответствующий запрос на прерывание. АЦП остается в активном режиме пока не будет выполнена очередная команда sleep. Обратите внимание, что АЦП не отключается автоматически при переводе во все режимы сна, кроме режима холостого хода и снижения шумов АЦП. Поэтому, пользователь должен предусмотреть запись лог. 0 в бит ADEN перед переводом в такие режимы сна во избежание чрезмерного энергопотребления. Если работа АЦП была разрешена в таких режимах сна и пользователь желает выполнить дифференциальное преобразование, то после пробуждения необходимо включить, а затем выключить АЦП для инициации расширенного преобразования, чем будет гарантировано получение действительного результата. Схема аналогового входа. Схема аналогового входа для однополярных каналов представлена на рисунке 6. Независимо от того, какой канал подключен к АЦП, аналоговый сигнал, подключенный к выводу ADCn, нагружается емкостью вывода и входным сопротивлением утечки. После подключения канала к АЦП аналоговый сигнал будет связан с конденсатором выборки-хранения через последовательный резистор, сопротивление которого эквивалентно всей входной цепи.
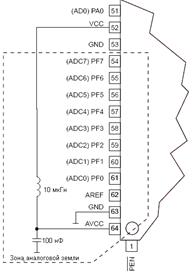
АЦП оптимизирован под аналоговые сигналы с выходным сопротивлением не более 10 кОм. Если используется такой источник сигнала, то время выборки незначительно. Если же используется источник с более высоким входным сопротивлением, то время выборки будет определяться временем, которое требуется для зарядки конденсатора выборки-хранения источником аналогового сигнала. Рекомендуется использовать источники только с малым выходным сопротивлением и медленно изменяющимися сигналами, т.к. в этом случае будет достаточно быстрым заряд конденсатора выборки-хранения. По отношению к каналам с дифференциальным усилением рекомендуется использовать сигналы с внутренним сопротивлением до нескольких сотен кОм. Следует предусмотреть, чтобы в предварительных каскадах формирования аналогового сигнала ко входу АЦП не вносились частоты выше fАЦП/2, в противном случае результат преобразования может быть некорректным. Если вероятность проникновения высоких частот существует, то рекомендуется перед АЦП установить фильтр низких частот. Технология подавления шума ADC. Работа цифровых узлов внутри и снаружи микроконтроллера связана с генерацией электромагнитных излучений, которые могут негативно сказаться на точность измерения аналогового сигнала. Если точность преобразования является критическим параметром, то уровень шумов можно снизить, придерживаясь следующих рекомендаций: 1. Выполняйте путь аналоговых сигналов как можно более коротким. Следите, чтобы аналоговые сигналы проходили над плоскостью (слоем) с аналоговой землей (экраном) и далеко от проводников, передающих высокочастотные цифровые сигналы. 2. Вывод AVCC необходимо связать с цифровым питанием VCC через LC (RC)-цепь в соответствии с рис. 7. 3. Используйте функцию подавления шумов АЦП, внесенных работой ядра CPU. 4. Если какой-либо из выводов АЦП используется как цифровой выход, то чрезвычайно важно не допустить переключение состояния этого выхода в процессе преобразования.
Результат преобразования АЦП. По завершении преобразования (ADIF=1) результат может быть считан из пары регистров результата преобразования АЦП (ADCL, ADCH). Для однополярного преобразования: При использовании дифференциального канала Результат представляется в коде двоичного дополнения, начиная с 0x200 (-512d) до 0x1FF (+511d). Обратите внимание, что при необходимости быстро определить полярность результата достаточно опросить старший бит результата преобразования (ADC9 в ADCH). Если данный бит равен лог. 1, то результат отрицательный, если же лог. 0, то положительный. Таблица 2. Соотношения между SCK и частотой генератора
Регистр статуса SPI - SPSR Bit 7 - SPIF: Флаг прерывания по SPI. По завершении обмена последовательными данными бит SPIF устанавливается в состояние 1 и, если бит SPIE в регистре SPCR установлен и разрешено глобальное прерывание, генерируется сигнал прерывания. Бит SPIF очищается аппаратно при выполнении подпрограммы обработки соответствующего вектора прерывания. Бит SPIF может быть очищен также при первом считывании состояния регистра статуса SPI, с установленным битом SPIF, с последующим обращением к регистру данных SPI (SPDR). Bit 6 - WCOL: Флаг ошибки при записи. Бит WCOL устанавливается в состояние 1, если в процессе передачи данных выполнялась запись в регистр данных (SPDR). Чтение содержимого регистра данных, как и запись в него, выполненные во время пересылки данных, могут привести к неверному результату. Бит WCOL (и бит SPIF) аппаратно очищаются (сбрасываются в состояние 0) при первом считывании регистра статуса SPI, с установленным WCOL, с последующим обращением к регистру данных SPI (SPDR). Bit 5..0 - Res: Зарезервированные биты. Эти биты в микроконтроллерах ATmegaхххх зарезервированы и при считывании всегда покажут состояние 0. Регистр данных SPI - SPDR Регистр данных SPI представляет собой регистр с возможностью чтения/записи и предназначен для пересылки данных между регистровым файлом и сдвиговым регистром SPI. Запись в регистр SPDR инициирует передачу данных, считывание регистра приводит к чтению сдвигового регистра приема.
SPI_MasterInit: ;; Настройка разрядов порта РХ к которому подключен SPI
Ldi r17,(1<<DD_MOSI)|(1<<DD_SCK); Out DDR_SPI,r17; Разрешение SPI, ведущий, частота fck/16 ldi r17,(1<<SPE)|(1<<MSTR)|(1<<SPR0) out SPCR,r17 ret
SPI_MasterTransmit: ;Стартовая передача данных (r16) out SPDR,r16 Wait_Transmit: ; Ожидания конца передачи sbis SPSR,SPIF rjmp Wait_Transmit ret
Рис. 44. Тестирование выборок принимаемых данных При поступлении стопового бита необходимо, чтобы не менее двух выборок из трех подтвердили прием стопового бита (показали высокий уровень). Если же две или более выборок покажут состояния 0, то, при пересылке принятого байта в UDR, в регистре статуса UART (USR) устанавливается бит ошибки кадра FE (Framing Error). Для обнаружения ошибки кадра пользователь перед чтением регистра UDR должен проверять состояние бита FE. Флаг FE очищается при считывании содержимого регистра данных UART (UDR). Вне зависимости от того принят правильный стоповый бит или нет, данные пересылаются в регистр UDR и устанавливается флаг RXC в регистре статуса UART (USR). Регистр UDR фактически является двумя физически отдельными регистрами, один из которых служит для передачи данных и другой для приема. При считывании UDR обращение ведется к регистру приема данных, при записи обращение ведется к регистру передачи. Если выбран режим обмена 9-разрядными словами данных (установлен бит CHR9 регистра UCR), при пересылке данных в UDR бит RXB8 регистра UCR загружается в бит 9 сдвигового регистра передачи. Если после получения символа к регистру UDR не было обращения, начиная с последнего приема, в регистре UCR устанавливается флаг переполнения (OR). Это означает, что новые данные, пересылаемые в сдвиговый регистр не могут быть переданы в UDR и потеряны. Бит OR буферирован и доступен тогда, когда в UDR читается байт достоверных данных. Пользователю, для обнаружения переполнения, необходимо всегда проверять флаг OR после считывания содержимого регистра UDR. При очищенном (сброшенном в логическое состояние 0) бите RXEN регистра UCR приемник запрещен. Это означает, что вывод PE0 может использоваться в качестве вывода I/O общего назначения. При установленном бите RXEN, приемник UART подключается к выводу PE0, который работает как вывод входа, вне зависимости от установки бита DDE0 в DDRE. При установке UART вывода PE0 на работу в качестве входа, бит PORTE0 может использоваться для управления нагрузочным резистором вывода. Регистр данных UART - UDR (адрес $0C ($2C)). В действительности регистр UDR является двумя физически разделенными регистрами - регистром передачи данных и регистром приема данных, использующими одни и те же адреса I/O. При записи в регистр запись производится в регистр передачи данных UART, при чтении происходит чтение содержимого регистра приема данных UART. Лекция № Последовательный интерфейс I2C Общие положения и введение в логику работы шины I2C Разработанная фирмой Philips шина I2C ("Inter-Integrated Circuit"), - это двунаправленная асинхронная шина с последовательной передачей данных и возможностью адресации до 128 устройств. Физически шина I2C содержит две сигнальные линии, одна из которых (SCL) предназначена для передачи тактового сигнала, вторая (SDA) для обмена данными. Для управления линиями применяются выходные каскады с открытым коллектором, поэтому линии шины должны быть подтянуты к источнику питания +5 В через резисторы сопротивлением 1...10 кОм, в зависимости от физической длины линий и скорости передачи данных. Длина соединительных линий в стандартном режиме может достигать 2-х метров, скорость передачи - до 100 кбит/с. Все абоненты шины делятся на два класса - "Master" и "Slave". Устройство "Master" генерирует тактовый сигнал (SCL) и, как следствие, является ведущим. Оно может самостоятельно выходить на шину и адресовать любое "Slave" - устройство с целью передачи или приема информации. Все "Slave"-устройства "слушают" шину на предмет обнаружения собственного адреса и, распознав его, выполняют предписываемую операцию. Кроме того, возможен так называемый "Multi Master" - режим когда на шине установлено несколько "Master"-абонентов, которые либо совместно разделяют общие "Slave"-устройства, либо попеременно являются то "Master"-устройствами, когда сами инициируют обмен информацией, то "Slave", когда находятся в режиме ожидания обращения от другого "Master"-устройства. Режим "Multi Master" требует арбитража и распознавания конфликтов. Естественно, он сложнее в реализации (имеется ввиду программная реализация) и, как следствие, реже используется в реальных изделиях. Рассмотрим пример. Поскольку в качестве ведущих обычно выступают микроконтроллеры, давайте рассмотрим пример пересылки данных между двумя микроконтроллерами, подключенными к шине. Пример покажет взаимоотношения передатчик-приемник и ведущий-ведомый, существующие в шине I2C. Необходимо заметить, что эти отношения не постоянны, а зависят только от направления пересылки данных в данный момент времени. Пересылка данных будет происходить следующим образом: 1. Пусть микроконтроллер А желает послать информацию в микроконтроллер В: -микроконтроллер А (ведущий) адресует микроконтроллер В (ведомый) -микроконтроллер А (ведущий-передатчик) посылает данные микроконтроллеру В (ведомый-приёмник) -микроконтроллер А заканчивает пересылку 2. Пусть микроконтроллер А желает принять информацию от микроконтроллера В: -микроконтроллер А (ведущий) адресует микроконтроллер В (ведомый) -микроконтроллер А (ведущий-приемник) принимает данные от микроконтроллера В (ведомый-передатчик) -микроконтроллер А заканчивает пересылку В обоих случаях ведущий (микроконтроллер А) генерирует синхроимпульсы и заканчивает пересылку. Отличительные особенности:
I2C-совместимые микросхемы позволяют ускорить процесс разработки от функциональной схемы до прототипа. Более того, поскольку такие микросхемы подключаются непосредственно к шине без каких-либо дополнительных цепей, появляется возможность модификации и модернизации системы прототипа путем подключения и отключения устройств от шины. Вот некоторые достоинства I2C-совместимых микросхем, которые касаются конструкторов: Блоки на функциональной схеме соответствуют микросхемам, переход от функциональной схемы к принципиальной происходит быстро. Схема подключения. (привести пример) Как SDA, так и SCL являются двунаправленными линиями, подсоединенными к положительному источнику питания через подтягивающий резистор. Когда шина свободна, обе линии находятся в ВЫСОКОМ положении. Выходные каскады устройств, подключенных к шине, должны иметь открытый сток или открытый коллектор для обеспечения функции монтажного И. Данные по шине I2C могут передаваться со скоростью до 100 кбит/с в стандартном режиме, и до 400 кбит/с в “быстром” режиме. Количество устройств, подключенных к шине, определяется единственным параметром - емкостью линии (до 400 пф).
Вследствие различных технологий микросхем (КМОП, биполярная), которые могут быть подключены к шине, уровни логического нуля (“НИЗКИЙ”) и логической единицы (“ВЫСОКИЙ”) не фиксированы и зависят от соответствующего уровня Vdd. I2C-устройства с фиксированными входными уровнями 1.5 В и 3 В могут иметь свои собственные питающие напряжения. Подтягивающие резисторы должны быть подключены к источнику 5 В ± 10% (рис.). I2C-устройства с входными уровнями, зависящими от напряжения питания должны иметь одну общую линию питания, к которой также должен быть подключен подтягивающий резистор (рис.). Когда устройства с фиксированным входным уровнем смешаны с устройствами с относительным входным уровнем, последние должны быть подключены к одной общей линии питания 5 В ±10% и должны иметь подтягивающие резисторы, подключенные к SDA и SCL контактам как показано на рис 23. Входные уровни определяются следующим образом: шумовая граница НИЗКОГО уровня есть 0.1 от напряжения питания шумовая граница ВЫСОКОГО уровня есть 0.2 от напряжения питания Как показано на рис. 24, последовательно включенные резисторы Rs (например, 300 Ом) могут быть использованы для защиты от высоковольтных выбросов напряжения на линиях шины.
Рис. Подключение устройств с фиксированным входным уровнем к шине I2C
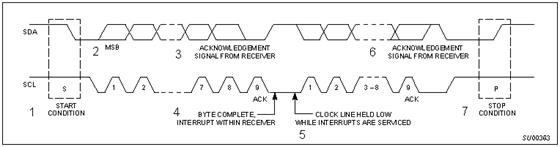
Каждый байт, передаваемый по линии SDA, должен состоять из 8 бит. Количество байт, передаваемых за один сеанс связи неограниченно. Каждый байт должен оканчиваться битом подтверждения. Данные передаются, начиная с наиболее значащего бита (см. Рис.). Если приёмник не может принять еще один целый байт, пока он не выполнит какую-либо другую функцию (например, обслужит внутреннее прерывание), он может удерживать линию SCL в НИЗКОМ состоянии, переводя передатчик в состояние ожидания. Пересылка данных продолжается, когда приёмник будет готов к следующему байту и отпустит линию SCL.
Start (S) и Stop (P) биты
Рис. Пересылка данных по шине I2C 1. Сигнал СТАРТ 2. Старший разряд байта 3. Сигнал подтверждения от приёмника 4. Прием байта завершен. Прерывание внутри приемника 5. Синхролиния удерживается в низком состоянии, пока обслуживается прерывание 6. Сигнал подтверждения от приемника 7. Сигнал СТОП Данные на линии SDA должны быть стабильными в течение ВЫСОКОГО периода синхроимпульса. ВЫСОКОЕ или НИЗКОЕ состояние линии данных должно меняться, только если линия синхронизации в состоянии НИЗКОЕ (см. Рис).
Рис. Пересылка бита в шине I2C Сигналы START и STOP. Специальные ситуации на шине отмечают сигналы START и STOP (см. Рис). Переход линии SDA из ВЫСОКОГО состояния в НИЗКОЕ, в то время как SCL находится в ВЫСОКОМ состоянии означает START. Переход линии SDA из НИЗКОГО состояния в ВЫСОКОЕ при SCL в ВЫСОКОМ состоянии означает STOP. Сигналы СТАРТ и СТОП всегда вырабатываются ведущим. Считается, что шина занята после сигнала СТАРТ. Шина считается освободившейся через определенное время после сигнала СТОП. Определение сигналов СТАРТ и СТОП устройствами, подключенными к шине достаточно легко, если в них встроены необходимые цепи. Однако микроконтроллеры без таковых цепей должны осуществлять считывание значения линии SDA как минимум дважды за период синхронизации для того, чтобы определить переход состояния.
Рис. Сигналы СТАРТ и СТОП
1. Сигнал СТАРТ 2. Сигнал СТОП Адресация. После того, как адрес послан, каждое устройство в системе сравнивает первые семь бит после сигнала СТАРТ со своим адресом. При совпадении устройство полагает себя выбранным как ведомый-приёмник или как ведомый-передатчик, в зависимости от бита направления. Адрес ведомого может состоять из фиксированной и программируемой частей. Вероятно, что в системе будет несколько таких одинаковых устройств, поэтому при помощи программируемой части адреса становится возможным подключить к шине максимально возможное количество таких устройств. Количество программируемых бит в адресе зависит от количества свободных выводов микросхемы. Например, если устройство имеет 4 фиксированных и 3 программируемых адресных битов, всего 8 одинаковых устройств может быть подключено к шине. Комитет I2C координирует выделение I2C адресов. Две группы по восемь адресов (0000ХХХ и 1111ХХХ) зарезервированы для других целей (указанны в таблице 2). Комбинация бит 11110ХХ адреса зарезервирована для 10-битной адресации. Пример адресов: A000-EEPROM Лекция № Таймеры/счетчики Таймер/Счетчик общего назначения (General Purpose Timer/Counter) предназначен для формирования запроса прерывания при истечении заданного интервала времени (режим таймера) или свершении заданного числа событий (режим счетчика). Микроконтроллеры семейства AVR могут иметь от одного до трех Таймеров/Счетчиков общего назначения Т/СХ (X-номер Таймера/Счетчика, Х=0, 1, 2). Основным элементом Таймера/Счетчика является базовый счетчик, который ведет счет на сложение. При его переполнении формируется запрос прерывания Т/СХ OVF. Таймер/Счетчик общего назначения может выполнять дополнительные функции: • функцию захвата; • функцию сравнения; • функцию широтно-импульсного модулятора; • функцию счета реального времени. Функция захвата (capture) заключается в запоминании кода, сформированного в базовом счетчике, в специальном регистре захвата при изменении значения определенного внешнего или внутреннего сигнала, При этом формируется запрос прерывания Т/СХ САРТ, Функция сравнения (compare) заключается в изменении значения сигнала на определенном выходе микроконтроллера при совпадении кода, формируемого в базовом счетчике, с кодом в специальном регистре сравнения. При этом формируется запрос прерывания Т/СХ СОМР. Функция широтно-импульсного модулятора (PWM) заключается в формировании на определенном выходе микроконтроллера импульсной последовательности с заданными периодом повторения и длительностью импульсов. Функции сравнения и PWM реализуются с использованием одного и того же оборудования. Выбор нужной функции выполняется программными средствами. Функция счета реального времени (Real Time Clock) реализуется в таймере-счетчике при использовании дополнительного внутреннего генератора с внешним кварцевым резонатором с частотой 32768 Гц ("часовой" кварц). При этом параметры процессов в таймере-счетчике с высокой точностью привязаны к единице измерения реального времени - секунде. В зависимости от разрядности счетчика и выполняемых дополнительных функций могут быть выделены пять типов таймеров-счетчиков общего назначения, входящих в группу периферийных устройств микроконтроллеров семейства AVR. Микроконтроллеры ATmega603/103 оснащены тремя Таймерами/Счетчиками общего назначения - двумя 8-разрядными и одним 16-разрядным. Таймер/Счетчик0, в дополнение к обычному режиму, может тактироваться асинхронно от внешнего генератора. Этот генератор оптимизирован под использование кварцевого кристалла на частоту 32768 кГц, что позволяет использовать Таймер/Счетчик0 как часы реального времени (Real Time Clock - RTC). Таймер/Счетчик0 оснащен своим собственным предварительным делителем. Таймеры/Счетчики 1 и 2 используют выходы ступеней деления общего 10-разрядного предварительного делителя. Эти два Таймера/Счетчика можно использовать как таймеры со встроенной временной базой или как счетчики, переключаемые по состоянию на внешнем выводе. Предварительные делители таймеров/счетчиков. Предварительный делитель таймеров/счетчиков 1 и 2 содержит четыре ступени деления: СК/8, СК/64, СК/256 и СК/1024, где СК - входной тактовый сигнал. Кроме того, в качестве источников тактовых сигналов могут быть использованы сигналы от внешних источников, тактовый сигнал СК и нулевой тактовый сигнал (stop). Тактовый сигнал таймера/счетчика0 обозначен TCK0. Этот тактовый сигнал по умолчанию подключен к основному тактовому сигналу системы CK. При установке бита AS0 в регистре ASSR таймер/счетчик0 будет асинхронно тактироваться сигналом с вывода TOSC1, что позволяет использовать таймер/счетчик0 в качестве часов реального времени (RTC). Генератор оптимизирован под использование кварцевого кристалла с частотой 32768 кГц, подсоединяемого между выводами TOSC1 и TOSC2. 8-разрядные Таймеры/Счетчики T/C0 и T/C2. 8-разрядный таймер/счетчик0 получает тактовый сигнал или непосредственно от TCK0 или после прохождения его через предварительный делитель. 8-разрядный таймер/счетчик2 получает тактовый сигнал непосредственно от CK, после прохождения его через предварительный делитель или от внешнего вывода. Оба таймера/счетчика могут быть остановлены, как это показано в описании регистров управления таймерами/счетчиками TCCR0 и TCCR2. В регистре флагов прерывания таймеров/счетчиков TIFR храня   ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 , где VВХ – уровень напряжения на подключенном к АЦП входу; Vион –напряжение выбранного источника опорного напряжения. Код 0x000 соответствует уровню аналоговой земли, а 0x3FF - уровню напряжения ИОН минус 1 шаг квантования по напряжению.
, где VВХ – уровень напряжения на подключенном к АЦП входу; Vион –напряжение выбранного источника опорного напряжения. Код 0x000 соответствует уровню аналоговой земли, а 0x3FF - уровню напряжения ИОН минус 1 шаг квантования по напряжению.