|
|
Полупроводниковые и микропроцессорные элементыПолупроводниковые приборы
В устройствах железнодорожной автоматики применяются бесконтактные элементы: диоды, транзисторы, тринисторы, стабилитроны, микросхемы различной степени интеграции, в том числе и микропроцессоры. Транзистор типа п-р-п (кремниевый) имеет те же три электрода (рис. 2.14, а), что и у германиевого транзистора. Для открытия транзистора на базу подается плюс, отчего протекает ток по переходу база-эмиттер, а после открытия протекает ток по переходу коллектор-эмиттер. За счет падения напряжения в резисторе напряжение на выходе равно нулю. Транзистор типа р-п-р (германиевый) имеет три вывода: эмиттер Э, коллектор К и базу Б (рис. 2.14, б). Транзистор работает в режиме переключения, находясь в двух состояниях: выход открыт (полное напряжение); выход закрыт (напряжение равно нулю). Для открытия транзистора на базу подается минусовый потенциал, отчего протекает ток по переходу эмиттер-база, а после открытия протекает ток по переходу эмиттер-коллектор. Для закрытия транзистора на базу подается плюс, отчего оба перехода и выход закрываются.
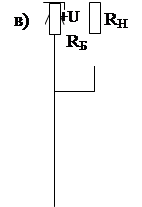
Стабилитрон (рис. 2.14, в) используется для стабилизации напряжения. При заданном уровне напряжения +U6 стабилитрон пробивается и пропускает ток в обратном направлении. Избыток напряжения +U6 гасится в резисторе Rб; напряжение на нагрузке снимается с резистора Rн. При включении стабилитрона в прямом направлении он работает как обычный диод.
Тиристор (рис. 2.14, г) используется как управляемый диод. Нормально тиристор закрыт и ток от анода к катоду не проходит. Для открытия тиристора пропускается небольшой ток по управляющей цепи (управляющий электрод-катод). С момента открытия ток протекает по цепи анод-катод и после размыкания управляющей цепи. Закрытие тиристоров делается путем замыкания цепи анод-катод, короткого замыкания между анодом-катодом, переключения полярности анода с положительной на отрицательную. Трансмиттерное бесконтактное реле (рис. 2.15) используется для передачи в рельсовую цепь импульсов кодового тока, которые вырабатывает трансмиттер КПТШ. Реле состоит из двух тиристоров Т1 и Т2, контактного реле Р, повторяющего работу контакта КПТШ. Если замыкается контакт КПТШ, срабатывает реле Р и фронтовым контактом замыкает управляющие цепи тиристоров. При положительной полярности замыкается управляющая цепь тиристора Т1: ПХ-220 — Д6 — R3 — фронтовой контакт Р — переход (У — К Т1) — фронтовой контакт К — первичная обмотка путевого трансформатора ПТ – ОХ-220. Затем открывается цепь Э-К, и тиристор пропускает положительную полуволну переменного тока в рельсовую цепь. При отрицательной полуволне переменного тока тиристор Т1 закрывается, и образуется управляющая цепь тиристора Т2: ОХ-220 — ПТ — К — Д5 — Р — R3 — (У —К Т2) — ПХ-220. Через переход Э-К тиристор пропускает отрицательную полуволну переменного тока в рельсовую цепь.
2.15. Трансмиттерное бесконтактное реле
Симметричный триггер на транзисторах типа p-n-р (рис. 2.16) применяется как элемент релейного действия. Триггер состоит из двух транзисторов Т1 и Т2, связанных между собой через резисторы RС1, RС2, и имеет два устойчивых состояния: открыт транзистор Т2, закрыт транзистор Т1 (состояние 0), закрыт транзистор Т2, открыт транзистор Т1 (состояние 1). В состояние 1 триггер переключается по входным цепям S, в состояние 0 — по цепям R. При состоянии 0 открыт выход Переключение триггера из состояния 0 в состояние 1 производится подачей на вход x11 отрицательного импульса или на вход x10 положительного импульса. В первом случае сначала открывается Т1, а затем закрывается Т2, и триггер переходит в состояние I; во втором случае сначала закрывается Т2, затем открывается Т1, и триггер также переходит в состояние I.
Рис. 2.16. Схема триггера
Триггер из состояния 1 в состояние 0 переключается подачей на вход x00 положительного импульса или на вход x01 — отрицательного. Логические элементы. При построении логических схем устройств автоматики выполняются заданные условия включения, переключения, отключения различных цепей. Эти условия определяются логическими зависимостями между отдельными элементами, узлами, блоками автоматических устройств и называются логическими зависимостями. Выполнение логических зависимостей осуществляется с помощью логических элементов различных типов, определяющих характер зависимостей. Наиболее распространенными являются логические элементы типов И, ИЛИ, НЕ, И-НЕ и ИЛИ-НЕ. На рис. 2.17 с целью наглядности построение перечисленных элементов поясняется соединением контактов реле, а также показываются условные обозначения логических элементов. Возбужденное состояние реле обозначается символом 1, обесточенное 0. Фронтовые контакты реле обозначают через х1, х2 и т. д., а тыловые — через Элемент И реализуется путем последовательного соединения фронтовых контактов х1 и х2, отчего цепь замыкается только при условии, если х1 = 1 и х2 = 1. Следовательно, на выходе элемента И появление 1 будет только в том случае, когда на его двух входах будут 1. Отсутствие 1 хотя бы на одном входе вызывает появление на выходе 0. Операция И иначе называется логическим умножением и определяется произведением х1 х2.
Рис. 2.17. Логические элементы Элемент ИЛИ реализуется путем параллельного соединения контактов х1 и х2, отчего цепь образуется при условии замыкания хотя бы одного из контактов схемы. На выходе логического элемента ИЛИ появление 1 будет в случаях, когда на одном из его входов будет 1; появление 0 будет в случае, когда на всех входах будут 0. Операция ИЛИ иначе называется логическим сложением, имеющим отличный знак по сравнению со знаком арифметического сложения. Элемент НЕ при подаче на вход значения 1 (0) обеспечивает появление на выходе обратного (инверсного) значения 0 (1). Логический элемент НЕ также называют инвертором. Элемент И-НЕ сочетает в себе элементы И и НЕ и обеспечивает при подаче на входы значений 1, на выходе значение 0. Контактная цепь с последовательным соединением фронтовых контактов х1 и х2 элементом И-НЕ преобразуется в свою противоположность, т. е. в цепь с параллельным соединением тыловых контактов Элемент ИЛИ-НЕ сочетает в себе элементы ИЛИ и НЕ и обеспечивает при подаче на входы значений 0, на выходе значение 1. Контактная цепь с параллельным соединением фронтовых контактов х1 и х2 преобразуется в свою противоположность — в цепь с последовательным соединением тыловых контактов Путем использования полупроводниковых приборов и логических элементов в системах телемеханического управления и контроля строятся распределители, регистры, шифраторы, дешифраторы. Распределитель Р (рис. 2.18, а) обеспечивает распределение по отдельным электрическим цепям серии импульсов, поданных на вход. Если на вход распределителя Р подаются импульсы 1 — 5, то с помощью счетной схемы, собранной на триггерах, эти импульсы в порядке последовательности распределяются по выходным цепям распределителя. Регистр РГ представляет собой устройство, служащее для запоминания импульсов, поступающих на его вход. Элементами запоминания являются триггеры с двумя устойчивыми состояниями 1 и 0. Шифратор (рис. 2.18, б) является сложным узлом телемеханической системы, с помощью которого шифруется кодовое сообщение и преобразуется в сигнал, передаваемый в канал связи. Для шифрации информация из источника сообщений ИС поступает в регистр РГ и запоминается. Если в РГ хранится сообщение, при котором на его выходах 1—5, как показано на схеме, присутствуют сигналы 1 и 0, то на первом выходе Р на оба входа первого элемента И поступает 1 и на выходе элемента также появляется 1. Через элемент ИЛИ эта 1 подается в модулятор М, где преобразуется в частотный сигнал, который передается в канал связи.
Рис. 2.18. Распределители, регистры, шифраторы и дешифраторы
На втором выходе распределителя совпадение входов второго элемента И не получается и на его выходе сохраняется 0. При дальнейшей работе распределителя процесс шифрации протекает аналогично. Дешифратор (рис. 2.18, в) также является сложным узлом телемеханической системы и обеспечивает дешифрацию (расшифровывание) принятого из канала частотного сигнала. При поступлении из канала частотного сигнала на выходе демодулятора ДМ появляются сигналы 1 и 0. Сигнал 1 или 0 поступает на один вход элементов И, на другой вход поступает сигнал 1 от распределителя. При поступлении на оба входа первого элемента И сигналов 1 на его выходе также появляется 1, которая передается в регистр РГ, где запоминается. При поступлении от демодулятора сигнала 0 очередной элемент И сохраняет на выходе 0 и в РГ сигнал не заносится. Записанная в РГ информация хранится до поступления последнего импульса частотного сигнала, после чего реализуется.
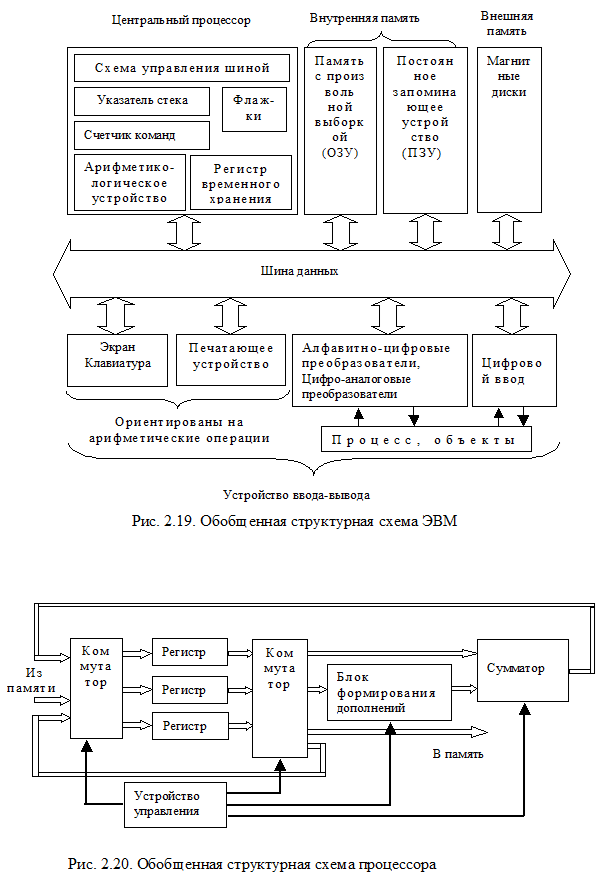
Микропроцессорные средства Технология изготовления интегральных элементов развивается по пути расширения функциональных возможностей схемы, заключаемой в один корпус. Появление первых процессоров ЭВМ, выполненных в виде интегральных схем (ИС), привело к буму микропроцессорной техники, а точнее, к широкому применению средств и методов вычислительной техники в системах управления технологическими процессами, в том числе и на железнодорожном транспорте. В настоящее время выпускается большое количество серий ИС, которые в сочетании с микропроцессорами (МП) позволяют создавать системы автоматизации любой сложности. Поскольку в таких системах МП является ключевым элементом, рассмотрим подробнее его организацию исходя из его места в ЭВМ. Ядром ЭВМ(рис. 2.19) является центральный процессор, осуществляющий арифметические и логические операции с данными, представляемыми в виде машинных слов, длиной от 4 до 64 бит. Слова организуются по байтам Арифметическо-логический блок процессора осуществляет операции сложения, перемещения, дополнения, сравнения, сдвига и т. д. со словами данных, хранящихся в регистрах и внутренней памяти машины. Программа, представляющая собой последовательность слов с командами и данными, хранится в памяти (внутренней или внешней) и под воздействием схемы управления реализуется в порядке записи. Процессор также содержит регистр для записи признаков (флажков) по переносу, знаку, нулевому результату, проверяемым при командах условного перехода, и стековый регистр, нужный для более удобной организации последовательности команд. Внутренняя память ЭВМ необходима для оперативного хранения данных (оперативное запоминающее устройство) в процессе работы и постоянного хранения (постоянное запоминающее устройство) часто используемых программ и данных. Постоянное запоминающее устройство (ПЗУ) должно хранить, как минимум, программу запуска машины при первоначальном включении питания, когда в оперативном запоминающем устройстве (ОЗУ) и процессоре еще ничего не записано.
Во время работы процессор отыскивает команды и данные, хранящиеся в ОЗУ, определяет их значение и совершает соответствующие действия. При выполнении текущей команды по ее содержанию процессор определяет задание для следующей операции. Внешняя память ЭВМ необходима для хранения больших массивов информации. Обычно во внешней памяти хранятся те данные, которые не нужны при данном расчете или не вмещаются в ОЗУ, так как обращение процессора к внешней памяти занимает очень много времени по сравнению с ОЗУ. Устройство ввода-вывода информации необходимо для общения с машиной внешних потребителей — людей и технических систем. Поэтому различают устройства, предназначенные для ввода-вывода буквенно-цифровой и графической информации, ориентированной на человека, и устройства взаимосвязи со средствами автоматизации технологических процессов. В последнем случае организуется взаимодействие ЭВМ и средств автоматики на основе обмена цифровой информацией в режиме реального времени. Это означает, что процессы преобразования, передачи и восприятия информации о событиях не должны быть заметны для хода управляемого производственного процесса. Шина данных является средством связи между всеми составными частями ЭВМ. По ней осуществляется передача слов, причем в любой момент времени с шиной работают только два устройства: одно — передает, другое — принимает. Шина состоит из группы информационных линий (обычно по числу разрядов машинного слова), группы адресных линий и группы управляющих линий. Информационные линии обычно являются двунаправленными, по ним передаются данные в любом направлении. Однако в каждый момент времени данные могут передаваться только в одном установленном направлении. Группа адресных линий (адресная шина) предназначена для выбора и подключения к шине данных устройства, с которым будет взаимодействовать процессор. Группа управляющих линий (шина управления) предназначена для задания процессором режима работы машины по выполнению текущей операции (передача или прием данных в процессор, прерывание, прямой доступ в память и т. д.). Успехи в производстве микросхем привели к созданию мини и микроЭВМ, по содержанию мало чем отличающихся от рассмотренной структуры ЭВМ. Под мини-ЭВМ обычно понимают малую вычислительную машину, центральный процессор которой выполнен на ИС средней и большой степени интеграции и размещен на одной или нескольких платах. МикроЭВМ представляет собой вычислительную машину, у которой процессор выполнен на одной или нескольких ИС большой степени интеграции (микропроцессор) и размещается вместе с ИС внутренней памяти (ОЗУ и ПЗУ) на одной-двух платах. Вычислительные возможности мини-ЭВМ и микропроцессоров (МП) в значительной степени совпадают, поэтому свойства системы больше зависят от состава внешних устройств. МикроЭВМ характеризуется высокой скоростью выполнения команд, сравнительно малыми емкостями ОЗУ и ПЗУ, небольшой длиной обрабатываемых слов (до 16 разрядов), малым числом внешних устройств, селекторным режимом обмена с внешними устройствами, небольшими размерами и потребляемой мощностью. Поскольку микроЭВМ обладает высокой производительностью, но слаборазвитым интерфейсом (системой связи) с внешними устройствами, то стремятся в приборах, устройствах и системах встраивать МП непосредственно в места, где необходима обработка информации. Чаще всего такие функционально законченные и конструктивно оформленные изделия, содержащие микропроцессор, модули памяти и устройства сопряжения с конкретным технологическим оборудованием для выполнения определенных программ управления, называют микроконтроллерами. Программируемость и многофункциональность МП позволяют по-новому подходить к разработке любых средств автоматизации. Традиционная жесткая логика систем (аппаратная реализация) целесообразна только в случаях автоматизации небольшого числа простых по содержанию операций, выполнение которых должно происходить с высокой скоростью и надежностью. Процессор является центральным устройством любой ЭВМ, от которого зависит ее производительность. Типовой процессор (рис. 2.20) содержит набор регистров для оперативного хранения данных (операнды), над которыми производятся операции, систему коммутаторов для направленного перемещения данных, сумматор с блоком формирования дополнения для выполнения арифметических операций (арифметическо-логическое устройство) и устройство управления, координирующее работу функциональных блоков процессора в соответствии с содержанием очередной команды программы. Программа работы записана в память машины и содержит все указания по управлению процессором. Управляющее устройство микропроцессора КР580ИК80А (рис. 2.21), которое состоит из регистра команд, дешифратора команд и схем управления. Регистр команд служит для приема кода операции текущей команды из памяти микропроцессорной системы и его хранения в течение выполнения команды. Дешифратор команд расшифровывает код операции и коммутирует схемы управления для выполнения команды. Арифметическо-логическое устройство (АЛУ) состоит из регистра временного хранения информации, регистра аккумулятора, кодопреобразователя, комбинационного АЛУ, аккумулятора, вентилей, регистра признаков и схемы десятичной коррекции. Регистр временного хранения и регистр аккумулятора предназначены для приема и хранения двух восьмибитных слов перед их передачей в комбинационное АЛУ преобразования. Эти регистры являются также вспомогательными при выполнении межрегистровых передач. Кодопреобразователь служит для передачи содержимого регистра RG1 в комбинационное АЛУ в прямом или обратном коде в зависимости от команды. Комбинационное АЛУ предназначено для выполнения операций сложения и вычитания, логических операций и сдвига данных. Оно производит параллельное преобразование двух восьмибитных слов из регистров RG1 и RG2.
Аккумулятор служит для приема и хранения результатов операции, выполненной комбинационным АЛУ. Через вентили содержимое аккумулятора может быть передано в регистр аккумулятора или на внутреннюю шину данных. Регистр признаков предназначен для запоминания особенностей результата операции, выполненной комбинационным АЛУ, и для выбора направления продолжения программы. Используются пять признаков: перенос, нуль, знак, четность, вспомогательный перенос. Схема десятичной коррекции позволяет комбинационному АЛУ при необходимости выполнять операции по правилам десятичной двоично-кодированной арифметики. Блок регистров включает шесть (В, С, D, E, H, L) восьмиразрядных регистров общего назначения, два (W, Z) восьмиразрядных регистра временного хранения, 16-разрядный регистр — указатель стека, 16-разрядный счетчик команд, 16-разрядный регистр адреса, схему инкремента-декремента, два восьмиразрядных мультиплексора 1 и 2 и 16-разрядный мультиплексор 3. Регистры В, С, D, Е, Н и L предназначены для хранения операндов или 16-разрядных адресов операндов. Они могут загружаться данными из памяти или из других регистров. Благодаря укороченному адресу регистров общего назначения операции с ними выполняются быстро, поэтому их называют сверхоперативной памятью МП. Регистры W и Z используются при выполнении команд для временного хранения слов. Счетчик команд предназначен для хранения адреса ячейки памяти, в которой находится очередная команда. При каждом обращении к программной памяти содержимое счетчика без участия АЛУ увеличивается на единицу (инкрементируется). После этого счетчик указывает следующий адрес ячейки памяти, где хранится очередная команда. Указатель стека служит для приема, хранения и выдачи адреса вершины стека, т. е. последней занятой ячейки внешней памяти, где после прерывания временно хранится информация из регистров данных, аккумулятора и регистра признаков. В указатель стека автоматически добавляется единица (инкрементируется) при выдаче байта данных и вычитается (декрементируется) при вводе. Регистр адреса предназначен для приема, хранения и выдачи адреса ячейки памяти в течение времени, достаточного для декодирования. Из регистра адрес выдается на буфер шины адреса и в схему инкремента-декремента, которая представляет собой комбинационную схему, увеличивающую или уменьшающую содержимое регистра адреса по сигналам управления. Буфер шины адреса служит для повышения нагрузочной способности шины адреса и имеет три состояния. Буфер шины данных предназначен для повышения нагрузочной способности шины данных и обеспечивает передачу данных в МП или из него. Мультиплексоры 1 и 2 служат для передачи информации между внутренней шиной данных и регистрами, а мультиплексор 3 — для передачи информации из блока регистров в регистр адреса. Схема выборки регистра представляет собой дешифратор кода команды, определяющей регистр для выполнения данной команды. Все виды взаимодействия МП с любыми внешними устройствами происходят по трем шинам — адреса, данных и управления. Логическое состояние этих шин полностью определяет состояние вычислительной системы в любой момент времени. Адресная шина (обычно 16 линий АО — А15) используется для выдачи из МП сигналов для выбора и электрического подключения внешнего устройства микропроцессорной системы. Шина данных (не менее восьми линий ДО — Д7) предназначена для двустороннего обмена информацией между МП и выбранным внешним устройством. Шина управления (не менее четырех линий) обеспечивает процессы соединения и переноса информации между МП и внешними устройствами. Указанные шины выполняют четыре основные функции, достаточные для взаимодействия МП с любым внешним устройством: запись данных в память системы; считывание данных из памяти системы; запись данных в устройство ввода-вывода; считывание данных с устройства ввода-вывода. Каждая из этих функций реализуется в три этапа: обеспечение на адресной шине стабильных уровней сигналов выбора устройства; стабилизация уровней сигналов на шине данных в соответствии с передаваемой информацией; активизация шины управления для выполнения нужной функции. Для работы микропроцессорной системы, кроме рассмотренных четырех функций, обязательна еще одна — выполнение операций с содержимым внутренних регистров. Выполнение любой команды происходит в такой последовательности: микропроцессор указывает адрес, по которому в памяти хранится код операции команды; код операции вводится в МП, который дешифрирует команду и выполняет одну из пяти основных функций в соответствии с результатами дешифрации команды. Взаимодействие МП с внешними устройствами предполагает определенную совокупность программных, аппаратных и конструктивных средств, составляющих так называемый интерфейс. Строго говоря, каждое устройство и модуль системы имеют свой интерфейс, но по функциональному назначению можно выделить: внутри машинный интерфейс для организации взаимодействия модулей МП; интерфейс для подключения внешних периферийных устройств; системный интерфейс для взаимодействия многих микропроцессоров в сложной (мультимикропроцессорной) системе. Внутри машинный интерфейс чаще всего выполняют в виде магистрали для параллельного способа передачи информации между модулями в асинхронном мультиплексном режиме, т. е. в любой момент времени организуется связь между двумя абонентами в одном направлении. Магистральный принцип является основным и для интерфейса периферийных устройств микропроцессорной системы, однако использование общих шин не вызывает затруднений только в том случае, если все объединяемые устройства находятся в непосредственной близости друг от друга. Так, параллельный интерфейс (многопроводный магистральный канал общего пользования) не может превышать 20 м, а общее число подключаемых устройств не может быть более 15. При больших расстояниях между МП и периферийными устройствами стремятся к использованию однопроводных линий с последовательным способом передачи информации. Такие интерфейсы (RS-422) позволяют иметь периферийные устройства на расстоянии до 1200 м. С устройствами, описанными в разделе 2.1, можно ознакомиться по [2, 3, 4].
Контрольные вопросы и задания
Контрольные вопросы
1. Пояснить принцип действия электромагнитных реле. 2. Чем отличаются реле первого класса надежности о других реле? 3. Классифицировать реле по принципу действия, по роду питающего тока, по времени срабатывания. 4. Что такое ток срабатывания, ток отпускания, коэффициент возврата? 5. Маркировка реле применяемых в устройствах автоматики и телемеханики. 6. Условные графические обозначения реле первого, второго и третьего класса надежности. 7. Конструкция нейтральных реле. 8. Конструкция поляризованных и импульсных реле. 9. Конструкция комбинированных реле. 10. Конструкция реле переменного тока. 11. Конструкция трансмиттера и графики кодовых сигналов. 12. Объясните принцип действия полупроводниковых приборов, бесконтактного трансмиттерного реле и триггера. 13. Назовите основные логические элементы и их функции. 14. Дайте определение понятиям: распределители, регистры, шифраторы, дешифраторы и выполняемые функции. 15. Пояснить работу структурной схемы микропроцессора.
Задание 1. Составить временную диаграмму работы пульс-пары, схема которой приведена в приложении 1. 2. Запустить программу 2 (см. приложение 7) и проследить за действием кодово-путевого трансмиттера.
  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|







 , при состоянии 1 — выход Q. Состояние триггера изменяется путем подачи положительных или отрицательных импульсов на входы x11,x00,x01,x10.
, при состоянии 1 — выход Q. Состояние триггера изменяется путем подачи положительных или отрицательных импульсов на входы x11,x00,x01,x10.
 1,
1,