
|
|
Способы описания автоматических систем (частотные характеристики, временные и переходные характеристики, математическое описание и операционное уравнение)Стр 1 из 5Следующая ⇒ Лекция 3 Способы описания автоматических систем (частотные характеристики, временные и переходные характеристики, математическое описание и операционное уравнение) Для анализа и синтеза системы управления требуется ее математическое описание, которое бы связывало поведение координат системы - ее переменных величин в процессе работы, то есть во времени. Поведение координат системы во времени называется динамикойсистемы. Так как система состоит из взаимосвязанных функциональных элементов, то для получения ее математического описания необходимо получить математические описания отдельных элементов. Математическое описание элемента устанавливает связь во времени между его текущими значениями выходных y(t) и входных x(t) величин. Динамикаэлемента, то есть поведение его координат во времени, описывается дифференциальными уравнениями. В динамике связь между координатами, то есть между входными и выходными величинами, меняется во времени. Динамика характеризуется переходным процессом. При времени, стремящемся к бесконечности t®¥, текущие координаты y(t) и x(t) принимают постоянные установившиеся значения и наступает статика элемента, которая описывается алгебраическими уравнениями. В статике входные и выходные величины элемента постоянные: x(¥)=x0=const; y(¥)=y0=const. Эти постоянные величины называются установившимися. А процесс, соответствующий статике, называется установившимся процессом. Теоретически статика наступает при t®¥, однако на практике принято считать, что статика наступает тогда, когда текущие координаты отличаются от своих установившихся значений не более чем на 5%. Динамическое уравнение отдельного элемента составляется по правилам соответствующей технической науки (элемент может представлять собой электрическую машину, механическую передачу, нагревательный прибор, электрическую цепь, электронную схему и т.п.).
Переходные характеристики элементарных звеньев
Здесь мы рассмотрим только самые основные звенья.
Безынерционное (пропорциональное, усилительное) звено
Это звено, для которого в любой момент времени выходная величина пропорциональна входной. Его уравнение: y(t) = k Передаточная функция: W(p) = k. Переходная характеристика: h(t) = k
В ответ на единичное ступенчатое воздействие сигнал на выходе мгновенно достигает величины в k раз большей, чем на входе и сохраняет это значение (рис.43). При k = 1 звено никак себя не проявляет, а при k = - 1 - инвертирует входной сигнал. Любое реальное звено обладает инерционностью, но с определенной точностью некоторые реальные звенья могут рассматриваться как безынерционные, например, жесткий механический рычаг, редуктор, потенциометр, электронный усилитель и т.п.
Интегрирующее (астатическое) звено
Его уравнение Передаточная функция: W(p) = k/p. Переходная характеристика:
При k = 1 звено представляет собой “чистый” интегратор W(p) = 1/p. Интегрирующее звено неограниченно "накапливает" входное воздействие. Примеры интегрирующих звеньев: электродвигатель, поршневой гидравлический двигатель, емкость и т.п. Введение его в САУ превращает систему в астатическую, то есть ликвидирует статическую ошибку.
Дифференцирующее звено Различают идеальное и реальное дифференцирующие звенья. Уравнение динамики идеального звена: y(t) = Идеальное дифференцирующее звено реализовать невозможно, так как величина всплеска выходной величины при подаче на вход единичного ступенчатого воздействия всегда ограничена. На практике используют реальные дифференцирующие звенья, осуществляющие приближенное дифференцирование входного сигнала. Его уравнение: Tpy + y = kTpu. Передаточная функция: W(p) = При малых Т звено можно рассматривать как идеальное дифференцирующее. Переходную характеристики можно вывести с помощью формулы Хевисайда:
здесь p1 = - 1/T - корень характеристического уравнения D(p) = Tp + 1 = 0; кроме того, D’(p1) = T. При подаче на вход единичного ступенчатого воздействия выходная величина оказывается ограничена по величине и растянута во времени (рис.47). По переходной характеристике, имеющей вид экспоненты, можно определить передаточный коэффициент k и постоянную времени Т. Примерами таких звеньев могут являться четырехполюсник из сопротивления и емкости или сопротивления и индуктивности, демпфер и т.п. Дифференцирующие звенья являются главным средством, применяемым для улучшения динамических свойств САУ.
Кроме рассмотренных имеется еще ряд звеньев, на которых подробно останавливаться не будем. К ним можно отнести идеальное форсирующее звено (W(p) = Tp + 1, практически не реализуемо), реальное форсирующее звено (W(p) = Безынерционное звено
W(p) = k. АФЧХ: W(j ВЧХ: P( МЧХ: Q( АЧХ: A( ФЧХ: ЛАЧХ: L( Некоторые ЧХ показаны на рис.50. Звено пропускает все частоты одинаково c увеличением амплитуды в k раз и без сдвига по фазе.
Интегрирующее звено
Передаточная функция:
Рассмотрим частный случай, когда k = 1, то есть W(p) = 1/p. АФЧХ: W(j ВЧХ: P( МЧХ: Q( АЧХ: A( ФЧХ: ЛАЧХ: L( ЧХ показаны на рис.51. Все частоты звено пропускает с запаздыванием по фазе на 90о. Амплитуда выходного сигнала увеличивается при уменьшении частоты, и уменьшается до нуля при росте частоты (звено "заваливает" высокие частоты). ЛАЧХ представляет собой прямую, проходящую через точку L(
Апериодическое звено
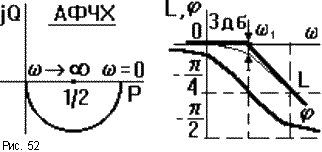
При k = 1 получаем следующие выражения ЧХ: W(p) =
L( Здесь A1 и A2 - амплитуды числителя и знаменателя ЛФЧХ; ЧХ показаны на рис.52. АФЧХ есть полуокружность радиусом 1/2 с центром в точке P = 1/2. При построении асимптотической ЛАЧХ считают, что при ЛФЧХ асимптотически стремится к нулю при уменьшении w до нуля (чем меньше частота, тем меньше искажения сигнала по фазе) и к -
Лекция 3 Способы описания автоматических систем (частотные характеристики, временные и переходные характеристики, математическое описание и операционное уравнение) Для анализа и синтеза системы управления требуется ее математическое описание, которое бы связывало поведение координат системы - ее переменных величин в процессе работы, то есть во времени. Поведение координат системы во времени называется динамикойсистемы. Так как система состоит из взаимосвязанных функциональных элементов, то для получения ее математического описания необходимо получить математические описания отдельных элементов. Математическое описание элемента устанавливает связь во времени между его текущими значениями выходных y(t) и входных x(t) величин. Динамикаэлемента, то есть поведение его координат во времени, описывается дифференциальными уравнениями. В динамике связь между координатами, то есть между входными и выходными величинами, меняется во времени. Динамика характеризуется переходным процессом. При времени, стремящемся к бесконечности t®¥, текущие координаты y(t) и x(t) принимают постоянные установившиеся значения и наступает статика элемента, которая описывается алгебраическими уравнениями. В статике входные и выходные величины элемента постоянные: x(¥)=x0=const; y(¥)=y0=const. Эти постоянные величины называются установившимися. А процесс, соответствующий статике, называется установившимся процессом. Теоретически статика наступает при t®¥, однако на практике принято считать, что статика наступает тогда, когда текущие координаты отличаются от своих установившихся значений не более чем на 5%. Динамическое уравнение отдельного элемента составляется по правилам соответствующей технической науки (элемент может представлять собой электрическую машину, механическую передачу, нагревательный прибор, электрическую цепь, электронную схему и т.п.).
  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 u(t).
u(t).
 , или
, или  , или py = ku.
, или py = ku.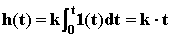 (рис.44).
(рис.44).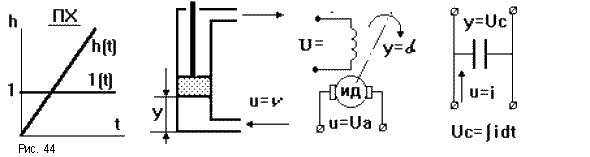
 , или y = kpu. Здесь выходная величина пропорциональна скорости изменения входной величины. Передаточная функция: W(p) = kp. При k = 1 звено осуществляет чистое дифференцирование W(p) = p. Переходная характеристика: h(t) = k
, или y = kpu. Здесь выходная величина пропорциональна скорости изменения входной величины. Передаточная функция: W(p) = kp. При k = 1 звено осуществляет чистое дифференцирование W(p) = p. Переходная характеристика: h(t) = k  .
. ,
,
 , при T1 >> T2), запаздывающее звено (W(p) = e - pT), воспроизводящее входное воздействие с запаздыванием по времени и другие.
, при T1 >> T2), запаздывающее звено (W(p) = e - pT), воспроизводящее входное воздействие с запаздыванием по времени и другие. Передаточная функция:
Передаточная функция: ) = k.
) = k. (
( W(p) = k/p.
W(p) = k/p. .
. /2.
/2. ;
;
 ;
; ;
; ;
; ;
; - 10lg1 = 0.. При
- 10lg1 = 0.. При