|
|
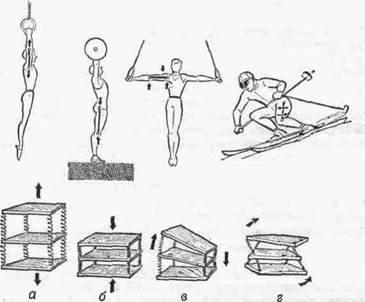
Тема 4. ТЕЛО ЧЕЛОВЕКА КАК БИОМЕХАНИЧЕСКАЯ СИСТЕМА1. Механические свойства звеньев и их соединений 2. Соединения звеньев 3. Звенья как рычаги 4.Биомеханические свойства мышц 5. Механическое действие мышц 6.Групповые взаимодействия мышц Строение и функции органов опоры и движения отличаются у человека большой сложностью. Этим обусловлено чрезвычайное многообразие возможностей положений и движений тела. Особенности тела человека, в частности двигательного аппарата, дают основание рассматривать тело в целом и его части как особые биомеханические системы. Под биомеханическими системами понимается объединение живых объектов (например, органов, тканей), обладающих общими особенностями в проявлении законов механического движения, а также общими особенностями способов управления ими, участия в этих движениях или в их использовании. Различают системы активные (всего тела, двигательного аппарата) и пассивные (внутренних органов, мягких и жидких тканей). Особый интерес для изучения движений человека представляет биомеханическая система его двигательного аппарата, которая служит: а) источником энергии, б) механизмом для передачи усилий, в) объектом движения и г) системой управления. МЕХАНИЧЕСКИЕ СВОЙСТВА ЗВЕНЬЕВ И ИХ СОЕДИНЕНИЙ С позиций теории механизмов и машин1 части тела человека, имеющие подвижные соединения, принято рассматривать как звенья, составляющие биокинематические пары и цепи. Звенья цепей и их соединения находятся под действием приложенных к ним сил (нагрузок). В этих условиях проявляются особенности строения и функции (механические свойства) тела человека, влияющие на выполнение движений. Виды нагрузок и характер их действия Силы, приложенные к телу и в совокупности вызывающиеегодеформации2, называются нагрузками. ( Деформация — изменение формы и размеров .) К основным видам деформаций относятся: растяжение, сжатие, изгиб, кручение и сдвиг (рис. 2). Кости скелета и мягкие ткани при деформации под действием приложенных сил (нагрузок) противодействуют им.
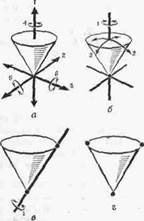
Рис. 2. Нагрузки, вызывающие деформацию: А — растяжение; б — сжатие; в — изгиб; г — кручение (ориг.). На схемах внизу — смещение элементов (по С. Э. Хайкипу) Нагрузки, обусловливающие растяжение,— это самые характерные нагрузки для мягких тканей. Они возникают, например, при висах (см. рис. 2, а) или во время удержания груза в опущенных руках. Нагрузки, создающие сжатие костей и хрящей, встречаются чаще всего при вертикальном положении тела на опоре. В этом случае на скелет действуют, с одной стороны, силы тяжести тела и вес внешних отягощений, а с другой —давление опоры (см. рис. 2, б). Нагрузки, вызывающие изгиб, обычно встречаются, когда кости выполняют роль рычагов. В этих случаях приложенные к ним силы мышц и силы сопротивления направлены поперек костей и вызывают изгиб (см. рис. 2, в). Наконец, нагрузки, обусловливающие кручение, чаще всего встречаются при вращательных движениях звена вокруг продольной оси (см. рис. 2, г). По характеру действия различают нагрузки статические и динамические. Первые обычно постоянны по величине и, как правило, относительно невелики. Вторые возникают при движениях1, когда приложены силы инерции; они изменяются и могут нарастать до очень больших величин (например, нагрузки на сжатие после падения с большой высоты, нагрузки на изгиб при ударе). Такие динамические нагрузки, особенно действующие не в обычном направлении (например, при ударе поперек кости), могут превысить запас прочности того или иного звена, тогда произойдет повреждение двигательного аппарата. Мышцы, суставные сумки, связки, а также хрящи, соединяющие кости скелета, деформируясь, уменьшают действие динамических нагрузок. Особенно большую роль в смягчении этого действия играют благодаря своей упругости мышцы. Если они недостаточно амортизируют нагрузку, то повреждаются связки и хрящи, а иногда даже и кости и сами мышцы. Кости, как твердые тела, при передаче сил выполняют роль рычагов. В биомеханике рассматривают в качестве твердых рычагов многие части тела (плечо, бедро и т. д.); считается, что они не изменяют своей длины, не сгибаются и не скручиваются. Упругие деформации Упругие деформации возникают в теле под действием нагрузки и исчезают при ее снятии. Изменение формы (деформация) тел под действием приложенных к ним сил — свойство всех реальных тел2. Абсолютно твердых тел, которые не деформируются ни прикаких условиях, в природене существует. В случае упругой деформации форма тела после прекращения действия деформирующей силы восстанавливается (например, стальная пружина) в отличие от пластической деформации, которая остается после снятия нагрузки, т. е. прежняя форма уже не восстанавливается (например, сырая глина). Таким образом, упругость — свойство тела самостоятельно восстанавливать после деформации свою форму. Упругая сила (сила упругого напряжения), противодействуя изменению формы, нарастает и, в конце концов, прекращает деформацию как останавливающая сила — в этот момент она становится равной деформирующей нагрузке. Эта же упругая сила при снятии деформирующей нагрузки восстанавливает прежнюю форму тела как восстанавливающая сила. Напряжение деформированного тела измеряется в килограммах на квадратный сантиметр его сечения3. Рассмотрим зависимость между деформацией тела и напряжением (на примере мягкой стали). Можно выделить 4 основных варианта: зона линейной упругости — напряжение прямо пропорционально деформации (идеальная пружина). После разгрузки деформация полностью исчезает; зона нелинейной упругости — на равные приращения деформации приходятся все меньшие (как у мягкой стали) или все большие (как у мышцы) приращения напряжения; после разгрузки форма тела полностью восстанавливается; зона пластической деформации — с увеличением деформации напряжение нарастает; после разгрузки форма тела восстанавливается не полностью (остаточная деформация); зона разрушения — тело начинает разрушаться. Зоны деформации различны у разных тел. Несколько упрощая, можно сказать, что у каждого тела в определенных условиях одна из зон больше других. Поэтому принято называть тело в зависимости от преобладающей зоны деформации линейно упругим, нелинейно упругим, пластическим или хрупким 1. Как было сказано выше, после упругой деформации происходит полное восстановление формы (линия ЛО); после пластической может произойти некоторое ее восстановление (линия БВ), но будет еще остаточная деформация (05). В пределах малых деформаций упругих тел напряжение пропорционально деформации. Это выражено в законе Гука: s=Еe (линейная упругость) — «растяжение нагруженного тела прямо пропорционально нагрузке». Коэффициент Е (коэффициент пропорциональности) называется модулем Юнга (продольной упругости). Он показывает, насколько изменяется напряжение при деформации данного тела, как тело сопротивляется деформации. Тела, для малых деформаций которых необходимы большие нагрузки, вызывающие большие напряжения, называются жесткими. Например, для чугуна модуль Юнга равен 900 000 кГ/см3; для кожаного ремня — 2000 кГ/см3; для мышцы — от 10 до 120 кГ/см2 и более. Считают, что модуль мышцы может изменяться более чем в 100 раз (приближенные данные). Мышцы как упругие тела обладают нелинейной упругостью и непременной жесткостью. СОЕДИНЕНИЯ ЗВЕНЬЕВ Соединения звеньев в биокинематических цепях обусловливают многообразие возможностей движении. От способа соединения и участия мышц в движениях зависит их направление и размах (пространственная. форма движений). 2.1. Кинематические пары Кинематическая пара — это подвижное соединение двух звеньев. Способ соединения накладывает ограничения (связи) на относительное движение (степени связи); наличие подвижности в соединении предоставляет звеньям определенные возможности относительного движения (степени свободы движения). Различают связи: а) геометрические (постоянные препятствия перемещению в каком-либо направлении) и б) кинематические (ограничениескорости, например, мышцей-антагонистом). Кинематические пары бывают: а) поступательные — одно звено может перемещаться поступательно по другому (например, боковые движения нижней челюсти); б) вращательные (па-пример, повороты в наиболее распространенных в теле человека цилиндрических и шаровидных суставах); в) винтовые с сочетанием поступательного и вращательного движений (например, в голеностопном суставе).Соединения, допускающие поворот звеньев пары, называют шарнирами. Кинематические цепи Кинематическая цепь — это последовательное или разветвленное соединение ряда кинематических пар.Кинематическую цепь, в которой конечное звено свободно, называют незамкнутой, а цепь, в которой нет свободного конечного звена,— замкнутой. В каждом соединении незамкнутой цепи возможны изолированные движения. Они геометрически независимы от движений в других соединениях (если не учитывать взаимодействия мыши). Например, свободные конечности, когда их концевые звенья свободны (рис. 4, а), представляют незамкнутые цепи. Замкнутыми кинематическими цепями в теле человека являются, например, грудина, ребро, позвоночник, ребро и снова грудина. Такие замкнутые цепи разомкнуть невозможно. Незамкнутые могут замыкаться, причем часто через опору (см. рис. 4, а). В сложной пирамиде, составленной несколькими акробатами, образуются даже своего рода «сети» (в плоскости) и «решетки» (в пространстве) с очень сложной взаимной зависимостью движений звеньев. В замкнутой или замкнувшейся цепи невозможно одиночное изолированное движение, т. е. движение в одном соединении. Так, сгибая и выпрямляя ноги в выпаде, можно убедиться в том, что движение в любом суставе непременно вызывает движения и в других (см. рис. 4, б). Таким образом, движения в незамкнутых цепях характеризуются относительной независимостью звеньев. В замкнутых же, а также замкнувшихся цепях движения одних звеньев влияют на движения даже отдаленных звеньев (помогают или мешают). Например, сгибая руки в локтевых суставах в упоре лежа (замкнувшаяся цепь), можно или отводить плечи, или разгибать их в плечевых суставах. Тогда будут растягиваться либо приводящие мышцы плеча (большие грудные, широчайшие спины и др.), либо сгибатели (передние части дельтовидных). Теперь при разгибании рук в локтевых суставах приводящие мышцы или сгибатели плечевых суставов в зависимости от того, какие мышцы растянуты, могут передавать свое действие на локтевые суставы — способствовать разгибанию рук в этих суставах. Передача действия мышц на смежные и отдаленные суставы характерна для замкнутых цепей и часто имеет место в подобных условиях работы мышц. В замкнутых цепях возможностей движений меньше, но управление ими точнее, чем в незамкнутых. Степени свободы движений Число степеней свободы движений соответствует количеству возможных независимых линейных и угловых перемещений тела. Тело, ничем не ограниченное в движениях (может двигаться в любом направлении), называется свободным. Движение свободного тела возможно в трех основных направлениях — вдоль осей координат, а также вокруг этих трех осей; оно имеет 6 степеней свободы движения (рис. 5, а). Наложение связей уменьшает количество степеней свободы (табл. 1). Если закрепить одну точку тела, то сразу снимается 3 степени свободы: тело не сможет двигаться вдоль трех осей координат; у него останутся только возможности вращения вокруг этих осей, т. е. только три степени свободы (см. рис. 5, б). Так соединены кости трехосных (шаровидных) с у с т а в о в.
При закреплении двух точек в теле возможно вращение лишь вокруг линии (оси), проходящей через обе точки (см. рис. 5, в). Так соединены кости одноосных суставов, обеспечивающих одну степень свободы. Если же закреплены три точки (не лежащие на одной линии), то движения тела совсем невозможны (см. рис. 5, г). Та кое соединение неподвижно и, следовательно, не является суставом. Как известно, двуосные суставы (эллипсовидный — лучезапястный, седловидный — первый запястно-пястный) обеспечивают вторую степень свободы благодаря неполному взаимному соответствию своих суставных поверхностей (неконгруэнтность). По этой же причине, если рука в локтевом суставе согнута, возможны приведение и отведение локтевой кости в плечелоктевом сочленении (например, при поворотах отвертки, штопора, ключа вокруг оси, проходящей вдоль второй пястной кости. в преобладающей части суставов тела человека 2 или 3 степени свободы. При нескольких степенях свободы движений (двух и более) возможно бесчисленное множество траекторий. Значит, в движениях в неодноосных суставах отсутствует определенность, задаваемая способом соединения. Тем более это характерно для цепей с несколькими неодноосными суставами. Множество возможностей движений в суставах кинематической пары более чем с одной степенью свободы в отличие от технической пары требует для выполнения каждого определенного движения: а) выбор необходимой траектории, б) управления движением по траектории (направлением и величиной скорости) и в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории (см. гл. IV). Геометрия движений Число основных осей сустава соответствует количеству степеней свободы движений одного звена относительно другого. Плоскость движения перпендикулярна оси вращения и характеризует направление перемещения звена. Размах движений — это угловое перемещение звена из одного крайнего положения в другое. В суставном движении различают ось, плоскость и размах. Все пары звеньев связаны в суставах неразрывно, как в шарнирах, поэтому они могут двигаться в основном только вокруг осей (не считая незначительного скольжения). Однако не существует суставов совершенно правильной геометрической формы. А если бы даже такие и были, то при сдавливании гиалиновых суставных хрящей форма суставных поверхностей нарушалась бы. Следовательно, геометрические оси вращения не постоянны и правильнее говорить о мгновенных осях вращения. В связи с этим количество осей в суставе означает в биомеханическом смысле только количество степеней свободы движения, а не постоянных геометрических осей вращения. Продольные оси звеньев чаще всего не строго перпендикулярны геометрическим осям вращения. Поэтому различные точки звеньев движутся в плоскостях, параллельных друг другу, а сама продольная ось звена описывает поверхности, близкие к коническим. Таким образом, плоскость движения в суставе характеризует, в какой плоскости движутся точки звена. Она перпендикулярна геометрической оси вращения и не обязательно совпадает с плоскостью движения продольной оси самого звена. Размахом движений измеряется подвижность в каждом отдельном суставе1. Наибольший размах бывает в пассивных движениях; с увеличением внешней нагрузки (вес отягощения, силы инерции) растягиваются мягкие ткани-ограничители. Размах же в активном движении меньше, чем в пассивном, так как там мышцы имеют предел силы, в то время как величина внешних сил не ограничена. К тому же сила собственных мышц пары звеньев приложена невыгодно при крайних положениях звеньев в суставе. Подвижностью соседних звеньев в соединениях каждой пары обусловлена гибкость всей кинематической цепи в целом. Гибкость цепи (например, позвоночника) измеряется общим размахом движения концевого звена относительно другого конца цепи. Общий размах движения в целомбываетменьше суммы размахов изолированных движений в суставах, так как вследствие пассивной недостаточности многосуставных мышц возникают дополнительные связи. ЗВЕНЬЯ КАК РЫЧАГИ Скелет, составленный из подвижно соединенных костей, представляет собой твердую основу биокинематических цепей. Звенья цепей с приложенными к ним силами (мышечной тяги и др.) в биомеханике рассматриваются как система составных рычагов. 3.1. Виды рычагов в теле человека Рычаг — твердое тело, которое может под действием приложенных сил вращаться вокруг опоры (оси) в двух противоположных направлениях, а также сохранять свое положение. Как простейший механизм, рычаг служит для передачи движения и силы на расстояние. Каждый рычаг имеет точку опоры — ось рычага (О на рис. 6), точки (А, В) приложения двух взаимно противодействующих сил (G и Q). Чтобы определить расстояние до места приложения сил от оси рычага, измеряют плечи рычага (О А и 0В). Чтобы определить расстояния до направления действия сил от оси рычага, измеряют плечи сил {а. и k — перпендикуляры, опущенные из точки О на линии действия сил, т. е. их направления). Рычаги бывают о д н о п л еч и е (с точкой опоры на конце рычага — см. рис. 6,а)и двуплечие(с точкой опоры между концами рычага — см. рис. 6, б). Принципиальной разницы в отношении работы сил между ними нет: поворачивая плечо двуплечего рычага вокруг точки О из положения do в di, затем da, можно перейти к рычагу одноплечему (см. рис.6, б). У нового, одноплечего, рычага иная форма, но те же свойства, что и у прежнего, двуплечего, рычага. Звенья тела человека имеют в своей основе костные рычаги. Двуплечие рычаги используются, например, при сохранении положения стоя, а одноплечие — в быстрых движениях конечностей. Одно и то же звено для разных мышц может быть то одноплечим, то двуплечим рычагом.   Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|