
|
|
ПІ-регулятор (пропорційно-інтегральний регулятор)Стр 1 из 3Следующая ⇒
Вихідний сигнал ПІ-регулятора складається з двох доданків: одного, пропорційного вхідному сигналу, та другого, пропорційного часовому інтегралу від вхідного сигналу,
де Ti стала часу регулятора. Для статичності режиму необхідно, щоб хвих =const. Це можливо лише в одному випадку, коли підінтегральна функція (хз-хзз)=0. Тобто, в статичному режимі виконується рівність хз= хзз. Таким чином, статична помилка буде відсутньою для будь-якого регулятора, який містить інтегральну складову. Отримаємо передаточну функцію ПІ-регулятора.
Тобто
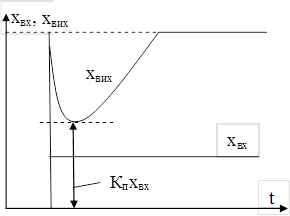
Перехідна характеристика ПІ-регулятора зображена на рисунку 1.19. Штриховою лінією показано обмеження, яке не може перевищити вихідний сигнал, викликане фізичними можливостями схеми регулятора.
Рисунок 1.19 ― Перехідна характеристика ПІ-регулятора
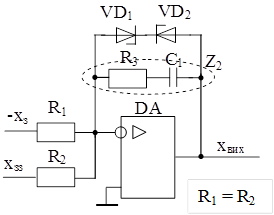
Схема на основі операційного підсилювача, яка реалізує ПІ-регулятор, показана на рис. 1.20.
Рисунок 1.20 ― Схема реалізації ПІ-регулятора
Передаточна функція схеми має наступний вигляд
Передаточну функцію регулятора можливо записати як суму пропорційної та інтегральної складових
Прирівнюючи відповідні складові передаточних функцій, отримаємо умови для розрахунку опорів та ємностей
Система складається з двох рівнянь, але містить три змінні. Тому задаються однією з них, наприклад С1 =(0,1…1мкФ), а R3 і R1 знаходять із системи рівнянь. Враховуючи властивість лінійності Z-перетворення, дискретна передаточна функція ПІ-регулятора є сумою дискретних передаточних функцій пропорційного та інтегрального регуляторів
Різницеве рівняння дискретного ПІ-регулятора
При реалізації дискретного ПІ-регулятора необхідно обмежувати не лише вихідний сигнал регулятора, а і інтегральну складову. Тобто, окремо програмувати рівняння для пропорційної і інтегральної складових з подальшим їх додаванням і обмеженням суми та інтегральної складової.
ПІД-регулятор (пропорційно-інтегрально-диференціальний регулятор) Вихідний сигнал регулятора є сумою пропорційної, інтегральної та диференціальної складових
де Tд – стала диференціювання. В операторному вигляді
Передаточна функція ПІД-регулятора
Перехідна характеристика ПІД-регулятора представлена на рис. 1.21.
Рисунок 1.21 ― Перехідна характеристика ПІД-регулятора
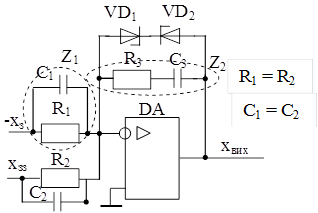
Технічна реалізація ПІД-регулятора показана на рис. 1.22.
Рисунок 1.22 ― Схема для технічної реалізації ПІД-регулятора
Відповідно передаточна функція схеми буде мати вигляд
Прирівнюючи відповідні складові передаточних функцій, отримаємо умови для розрахунку
Система складається з трьох рівнянь і містить чотири змінні. Однією необхідно задатися, а інші знайти із системи. Враховуючи властивість лінійності Z-перетворення, дискретна передаточна функція ПІД-регулятора є сумою дискретних передаточних функцій пропорційного, інтегрального та диференціального регуляторів
Різницеве рівняння дискретного ПІ-регулятора
При реалізації дискретного ПІД-регулятора необхідно обмежувати не лише вихідний сигнал регулятора, а і інтегральну складову.
Задатчик інтенсивності
Задатчик інтенсивності – пристрій (або програма), який при подачі стрибку завдання хз на його вхід, забезпечує лінійне наростання в функції часу свого вихідного сигналу хз / до величини стрибку завдання. Перехідна характеристика задатчика інтенсивності представлена на рис. 1.23.
Рисунок 1.23 ― Перехідна характеристика задатчика інтенсивності
Кут
Рисунок 1.24 ― Перехідні характеристики задатчика інтенсивності при різних кутах наростання
Основний недолік задатчика інтенсивності - наявність точки розриву похідної сигналу завдання. В задатчиках на базі операційних підсилювачів такий розрив існує лише теоретично і перехід від лінійного наростання сигналу до сталого значення здійснюється нелінійно монотонно. Функціональна схема задатчика інтенсивності подана на рис. 1.25.
Рисунок 1.25 ― Функціональна схема задатчика інтенсивності
Функціонально задатчик інтенсивності складається з підсилювача П (з великим коефіцієнтом підсилення Картина перехідних процесів в задатчику інтенсивності показана на рис. 1.26.
Рисунок 1.26 ― Картина перехідних процесів в задатчику інтенсивності
В момент часу Сигнал на виході І
Оскільки
Проте, вихід НЕ все ще залишається в зоні обмеження через велику величину
Сигнал Схема електрична принципова задатчика інтенсивності продемонстрована на рис. 1.27.
Рисунок 1.27 ― Схема електрична принципова задатчика інтенсивності
На схемі необхідно прийняти При дискретному виконанні в схемі на рис. 1.25 використовується дискретний інтегратор, з передаточною функцією
де Т0 – період квантування системи, в якій застосовується задатчик інтенсивності. Альтернативно, задатчик інтенсивності можна реалізувати на базі лінійно-наростаючого сигналу з обмеженням. У цьому випадку існуватиме розрив похідної завдання та при зміні величини завдання необхідно змінювати величину обмеження.   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ,
, .
. .
.
 .
. .
.
 .
.
 ,
, .
. .
.





 - кут наростання вихідного сигналу. Кожен задатчик інтенсивності характеризується сталою часу задатчика інтенсивності Тзі. Чим більше її значення, тим менший кут наростання вихідного сигналу (рис. 1.24).
- кут наростання вихідного сигналу. Кожен задатчик інтенсивності характеризується сталою часу задатчика інтенсивності Тзі. Чим більше її значення, тим менший кут наростання вихідного сигналу (рис. 1.24).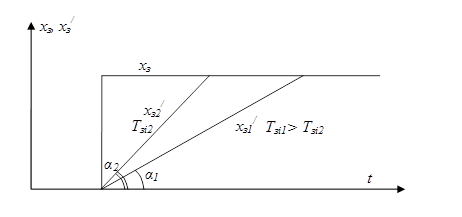
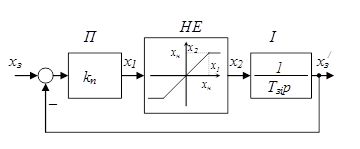
 ), нелінійного елемента НЕ типу “насичення” та інтегратора І.
), нелінійного елемента НЕ типу “насичення” та інтегратора І.
 на вхід схеми поступає стрибок завдання
на вхід схеми поступає стрибок завдання  . При цьому на виході підсилювача буде сигнал
. При цьому на виході підсилювача буде сигнал  . Оскільки
. Оскільки  , то вихід НЕ потрапляє в зону обмеження (вихідний сигнал НЕ
, то вихід НЕ потрапляє в зону обмеження (вихідний сигнал НЕ  ).
). .
. , то
, то  розпочинає наростати. При цьому
розпочинає наростати. При цьому  зменшується згідно рівняння
зменшується згідно рівняння .
. . Тому
. Тому  і
і
 . При подальшому збільшенні
. При подальшому збільшенні  . Оскільки сигнал на вході інтегратора зменшується, то на його виході сигнал наростатиме, але з меншою інтенсивністю. Чим менше
. Оскільки сигнал на вході інтегратора зменшується, то на його виході сигнал наростатиме, але з меншою інтенсивністю. Чим менше  . Іншим чином,
. Іншим чином,  та
та  . Чим більша величина
. Чим більша величина 
 та забезпечити
та забезпечити  ,
,  ,
,  . Інвертор призначений для зміни лише полярності напруги. У даній схемі він забезпечує від’ємність зворотного зв’язку за
. Інвертор призначений для зміни лише полярності напруги. У даній схемі він забезпечує від’ємність зворотного зв’язку за  ,
,