|
|
Замкнутые схемы управления электроприводов сдвигателями переменного тока
По исторически сложившейся тенденции регулируемый ЭП строился главным образом с использованием ДПТ. В последние годы в связи с появлением разнообразных средств управления регулируемый ЭП переменного тока начал быстро вытеснять АЭП с ДПТ. Uу=Uз.с-Eтг, (1) поступает на вход СИФУ. При увеличении этого сигнала угол управления тиристорами уменьшается, а подаваемое на АД напряжение увеличивается и наоборот. В цепь ротора АД постоянно включен добавочный резистор R2Д, наличие которого позволяет расширить диапазон регулирования скорости и облегчить тепловой режим АД при его работе на пониженных скоростях. Рассмотрим работу ЭП при изменении момента нагрузки Мс на валу АД и постоянном задании скорости сигналом U3.С2. Допустим также, что в исходном положении АД работал в точке 1 при моменте нагрузки MС1 (рис. 1,б), а затем произошло его увеличение до значения МС2. При увеличении нагрузки на валу АД его скорость начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератора ЕТГ. Уменьшение Етг вызывает согласно (1) увеличение напряжения управления, что приведет к уменьшению угла отпирания тиристоров и увеличению тем самым подаваемого на АД напряжения.
а)
При уменьшении момента нагрузки Мс будет автоматически происходить снижение напряжения на АД и тем самым поддержание его скорости вращения на заданном уровне. Изменяя с помощью потенциометра значение задающего напряжения U3.С, можно получить ряд механических характеристик электропривода с относительно высокой жесткостью и необходимой перегрузочной способностью АД. В качестве силового преобразователя в ЭП используется тиристорный преобразователь частоты со звеном постоянного тока, состоящий из управляемого выпрямителя (УВ) и инвертора напряжения (ИН) со своими схемами управления СУВ и СУИ. Между УВ и ИН включен силовой фильтр Ф, обеспечивающий фильтрацию выходного напряжения и циркуляцию реактивной мощности в силовой части схемы. Схема управления ЭП построена по принципу подчиненного регулирования координат и имеет два контура — внутренний (тока) и внешний (напряжения). Регулирование этих координат осуществляется пропорционально-интегральными регуляторами тока РТ и напряжения РН, по сигналам датчиков тока ДТ и напряжения ДН. При частотах ниже номинальной схема управления поддерживает отношение напряжения к частоте постоянным, а при частотах выше номинальной напряжение остается неизменным, что обеспечивается усилителем — ограничителем УО. Преобразователь частоты обеспечивает рабочие диапазоны изменения частоты (5... 80) Гц при номинальной частоте 50 Гц и (15...240) Гц при номинальной частоте 200 Гц. Диапазон регулирования напряжения составляет (0... 380) В. Серия ЭКТ2 выпускается на мощности от 16,5 до 263,5 кВт. КПД этих ЭП лежит в пределах (85...96)%. Примерный вид механических характеристик ЭП при различных сигналах задания скорости приведены на рисунке 2, б. ЭП этой серии могут обеспечивать торможение с рекуперацией энергии в сеть. В этом случае силовая часть ЭП дополняется ведомым сетью инвертором, а в обозначении ЭП появляется буква Р (ЭКТР и ЭКТ2Р).
Рисунок 2 - Схема (а) замкнутого ЭП с частотным управлением АД и механические характеристики (б) 3 Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора в цепи ротора В роторную цепь АД включен неуправляемый трехфазный выпрямитель В, к выходу которого подключен резистор R2Д. Управление ключом происходит от широтно-импульсного модулятора ШИМ, на вход которого поступают сигналы задания U3.C и обратной связи Uo.c по скорости. При поступлении на вход ШИМ сигнала ошибки Uy = UЗ.С – UОС он начинает генерировать импульсы управления. Эти импульсы с помощью схемы управления ключом СУК распределяются по тиристорам ключа и вызывают периодическое включение и закорачивание резистора R2. Принцип получения жестких характеристик ЭП состоит в следующем. Допустим, что АД работает в установившемся режиме при каком-то заполнении ключа К, чему соответствует эквивалентное сопротивление цепи ротора. Пусть по каким-то причинам произошло увеличение момента нагрузки АД, в результате чего начнет снижаться его скорость. Тогда сигнал управления Uy начнет повышаться, что вызовет увеличение заполнения работы ключа К и уменьшение тем самым эквивалентного сопротивления в цепи ротора. Это, в свою очередь, приведет к увеличению тока в роторе и момента АД и прекращению снижения скорости, что соответствует жестким характеристикам ЭП. В схеме может быть достигнуто и регулирование (ограничение) тока и момента, для чего она должна быть дополнена контуром регулирования тока.
Электромашинные преобразователи частоты
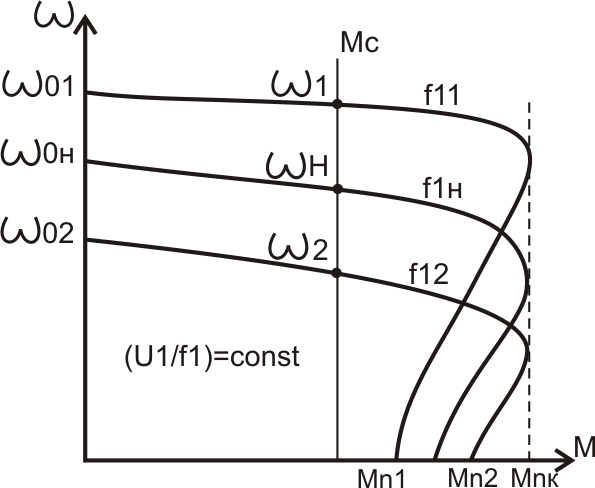
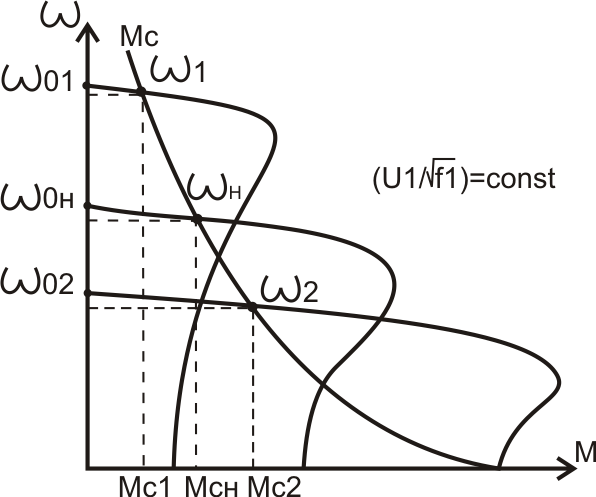
Частотное регулирование скорости значительно расширяет возможности асинхронных электроприводов в различных отраслях промышленности и сельского хозяйства. Возможность изменения скорости АД при регулировании частоты f1 следует непосредственно из выражения ?o=2? f1 /р. Из которого видно, что синхронная скорость АД прямо пропорциональна частоте питающего напряжения. При регулировании частоты возникает также необходимость регулирования напряжения источника питания. Действительно, ЭДС обмотки статора АД пропорциональна частоте и потоку Е1=kФf1. Из приведенного выражения следует, что при неизменном напряжении источника питания U1 и регулировании его частоты меняется магнитный поток АД. В частности, уменьшение частоты f1 приводит к возрастанию потока и, как следствие, к насыщению машины и увеличению тока намагничивания, что связано с ухудшением энергетических показателей двигателя, а в ряде случаев и к его недопустимому нагреву. Увеличение частоты f1 приводит к снижению потока двигателя, что при постоянном моменте нагрузки на валу в соответствия с выражением М= kФI2cos?2 приводит к возрастанию тока ротора, т.е. к перегрузке его обмоток по току при недоиспользованной стали. Кроме |того, с этим связано снижение максимального момента и перегрузочной способности двигателя. Для наилучшего использования АД при регулировании скорости изменением частоты необходимо регулировать напряжение, одновременно в функции частоты и нагрузки. Обычно при регулировании выше основной скорости частота источника питания превышает номинальную не более чем в 1,5 - 2 раза. Указанное ограничение обусловлено прежде всего прочностью крепления обмотки ротора. Регулирование скорости вниз от основной, как правило, осуществляется в диапазоне 10 ч 15. Нижний предел частоты ограничен сложностью реализации источника питания с низкой частотой, возможностью неравномерности вращения и рядом других факторов. Таким образом, частотное регулирование скорости АД может осуществляться в диапазоне 20 ч 30. Из всего многообразия зависимостей Мс(?) в теории электропривода обычно рассматриваются три наиболее часто встречающиеся типа статических нагрузок и закона частотного регулирования (рис. 1): 1) момент статической нагрузки не зависит от скорости x=0; Mc=const; закон - (U1/f1) =const; 2) при регулировании скорости мощность на валу остается постоянной Pc=const; x= -1; закон - 3) идеализированная вентиляторная нагрузка x=2; закон - (U1/f12)=const.
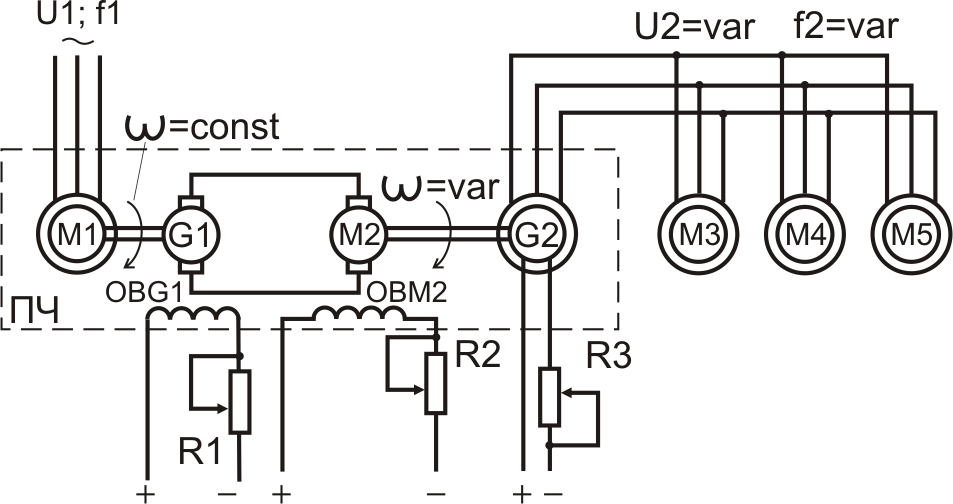
Принципиальная схема электромашинного преобразователя с промежуточным звеном постоянного тока, в котором используется синхронный генератор, показана на рисунке 2. Преобразователь состоит из агрегата постоянной скорости (М1,G1), предназначенного для преобразования переменного тока сетевого напряжения и неизменной частоты в регулируемое постоянное напряжение, которое зависит от тока возбуждения генератора постоянного тока G1. Двигатель постоянного тока М2 агрегата переменной скорости получает питание от генератора G1. При изменении напряжения на выводах генератора G1 (с помощью резистора R1) плавно регулируется угловая скорость двигателя М2 и одновременно угловая скорость синхронного генератора G2, что позволяет регулировать частоту выходного тока G2. Напряжение на выходе G2 можно регулировать током возбуждения синхронного генератора с помощью R3.
Независимо от частоты (угловой скорости) синхронного генератора G2 амплитуда напряжения на его выходе может регулироваться только вниз от номинального значения. Если мощность, потребляемая асинхронными двигателями от источника регулируемой частоты, равна Рном, то при пренебрежении потерями в машинах общая установленная мощность преобразователи частоты составит С учетом потерь энергии в машинах преобразователя частоты его установленная мощность будет превышать четырехкратное значение установленной мощности нагрузки, что является недостатком электромашинного преобразователя частоты. Другим его недостатком является низкий КПД, определяемый произведением КПД отдельных машин. Если, например, КПД каждой машины при полной нагрузке принять равным 0,9, то номинальный КПД преобразователя составит 0,94 = 0,66. С уменьшением нагрузки и при регулировании угловой скорости двигателей МЗ — М5 вниз от основной КПД становится еще меньше. Регулирование частоты связано с преодолением значительной механической и электромагнитной инерционности, которой обладает электромашинный преобразователь.
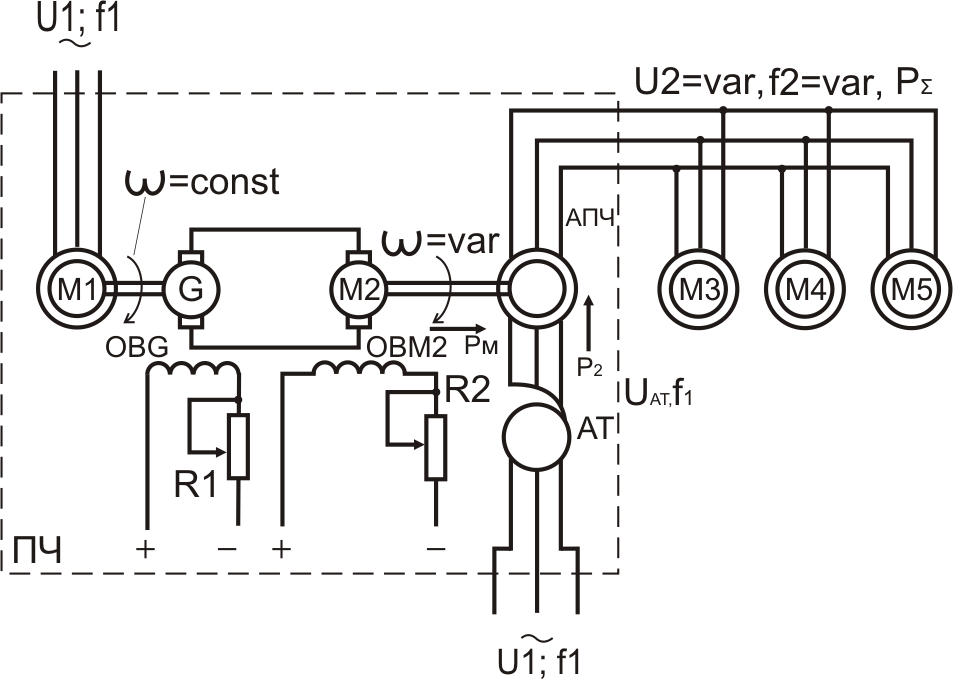
В схемах электромашинного преобразователя частоты могут быть использованы в качестве основного преобразователя обычные асинхронные машины с фазным ротором в режиме асинхронного преобразователя частоты. Одна из таких схем с асинхронным преобразователем частоты АПЧ приведена на рисунке 3. Здесь статор АПЧ присоединен к сети переменного тока через автотрансформатор АТ, позволяющий независимо регулировать на входе (и выходе) АПЧ амплитуду напряжения. Ротор АПЧ механически связан с якорем двигателя М2, угловая скорость которого регулируется по системе Г—Д так же, как и в предыдущей схеме с синхронным генератором. Вторичная (роторная) цепь АПЧ служит источником напряжений регулируемой частоты и амплитуды. Частота на выходе АПЧ равна f2=f1±fМ2, где fМ2=?р/2?;? — скорость двигателя М2; f1 — частота напряжения питания статора, принятая равной частоте питающей сети. Энергия, передаваемая АПЧ нагрузке, при вращения против поля складывается из механической энергии, поступающей с вала двигателя М2, и электрической энергии, потребляемой АПЧ со стороны автотрансформатора АТ. При вращении по полю электрическая энергия, поступающая в статор АПЧ, частично передается нагрузке, а часть — двигателю М2, в этом случае работающему в генераторном режиме. Эта часть энергии после преобразований возвращается о сеть с помощью машины М1. Если, например, принять частоту на выходе АПЧ f2 = 100 Гц, а частоту питания f1 = 50 Гц, то активная мощность Р2 составит только 50 % установленной мощности нагрузки, а через двигатель М2 будет подводиться также 50 % Р?. Таким образом, при указанном соотношении частот установленная мощность машин системы Г—Д окажется вдвое меньше, чем в случае электромашинного преобразователя с синхронным генератором. Раздельное регулирование напряжения с помощью автотрансформатора АТ дает возможность (ограничиваемую насыщением стали АПЧ) устанавливать требуемое соотношение между U2 и f2. С возрастанием выходной частоты АПЧ установленная мощность преобразовательного устройства увеличивается. Электромашинные преобразователи частоты с АПЧ применяются обычно для получения частот, превышающих частоту питающей сети, когда необходимо регулировать угловую скорость большого числа согласованно работающих асинхронных двигателей с короткозамкнутым ротором.
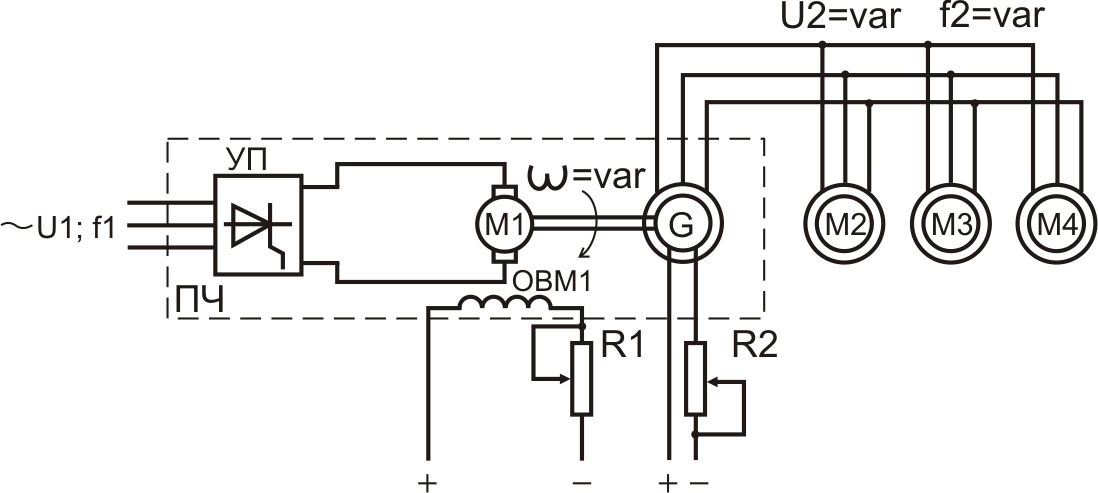
Схема вентильно-электромашинного преобразователя частоты с синхронным генератором (вместо него может быть использован и АПЧ) приведена на рисунке 4. Здесь вращающийся преобразовательный агрегат постоянной скорости заменен статическим управляемым преобразователем (выпрямителем) УП, собранным, например, на тиристорах. От управляемого выпрямителя питается двигатель М1 агрегата переменной скорости. В данном случае несколько повышается КПД преобразователя частоты ПЧ, сокращаются его габариты. ЛЕКЦИЯ 14 Статические преобразователи частоты
Лекция 15 Энергосбережение в АЭП
Энергосбережение — это комплекс правовых, технических и экономических мер, направленных на эффективное использование энергетических ресурсов. В соответствии с Федеральным законом РФ «Об энергосбережении» на промышленном предприятии должны быть разработаны мероприятия по экономии электроэнергии применительно к каждой электроустановке. В первую очередь это относится к устройствам с электрическим приводом, основной элемент которого электродвигатель. Известно, что более половины всей производимой в мире электроэнергии потребляется электродвигателями в электроприводах рабочих машин, механизмов, транспортных средств. Поэтому меры по экономии электроэнергии в электроприводах наиболее актуальны. Основные положения энергосбережения регламентированы государ-ственными стандартами РФ: ГОСТ Р 51379—99. Энергосбережение. Энергетический паспорт промышленного потребителя топливно-энергетических ресурсов. ГОСТ Р 31380—99. Энергосбережение. Методы подтверждения соответствия показателей энергетической эффективности энергопотребляющей продукции их нормативным значениям. Общие требования. ГОСТР 51387—99. Энергосбережение. Нормативно-методическое обеспечение. ГОСТР 51541-99. Энергосбережение. Энергетическая эффективность. Состав показателей. Задачи энергосбережения требуют оптимального решения не только в процессе эксплуатации электрических машин, но и при их проектировании.
При проектировании и эксплуатации разного рода электроприводов необходимо учитывать потребление и потери электроэнергии, влияние ЭП на сеть и другие электроприемники. Оценка этих свойств осуществляется с помощью так называемых энергетических показателей: коэффициента полезного действия, коэффициента мощности, потерь мощности и энергии. С целью уменьшения потерь энергии в период пуска или торможения двигатели к рабочим машинам подбирают таким образом, чтобы приведенный момент инерции привода при одной и той же скорости был наименьшим. Это реализуется за счет применения малогабаритных двигателей, имеющих пониженный J (двигатели с повышенным отношением длинны якоря к его диаметру, с полым или дисковым якорем). Целесообразно использование двух двигателей половинной мощности. Расчеты показывают; что?J двух двигателей половинной мощности оказывается меньше момента инерции одного двигателя на полную мощность. Например, два двигателя типа 4АН200 мощностью по 45 кВт имеющий суммарный момент инерции 2·1,38=2,76 кг·м2. Двигатель 4АН250 мощностью 90 кВт на ту же скорость имеет j=3,53 кг·м2, т.е. почти на 30% больше. Другой способ уменьшения потерь ЭП – регулирование скорости идеального холостого хода, что хорошо реализуется в ступенчатом пуске ЭП (для АД – регулирование частоты вращения с помощью частоты питающего тока или числа пар полюсов; для ДПТ – регулирование частоты вращения с помощью напряжения). При ступенчатом пуске отмечается снижение потерь электрической энергии в 2 раза. За счет изменения в переходном процессе w0 снижаются потери энергии в роторе АД. Уменьшение потерь энергии в роторе вызовет и снижение потерь в статоре и полных потерь в АД. Приведенный момент инерции ЭП зависит не только от момента инерции двигателя или рабочей машины, но и от передачи отношения между ними. Для уменьшение потерь энергии при пуске, передаточное отношение – i следует выбирать исходя из получения минимального приведенного момента инерции ЭП и проверять экономическим расчетом. КПД ЭП, как электромеханическая система определяется произведением преобразователя, управляющего устройства, электродвигателя и механической передачи?эп=?п·?уу·?эд·?мп. Наиболее значимой величиной является КПД двигателя, который растет с увеличением мощности и частоты вращения. КПД зависит также от развиваемой им полезной механической мощности на валу (рис. 1). Работа ЭП, как и любого другого потребителя характеризуется коэффициентом мощности сos Если Q не потребляется, то сos Рисунок 1 – Зависимость КПД и коэффициента мощности электродвигателя от кратности нагрузки
- ограничение времени работы на холостом ходу;
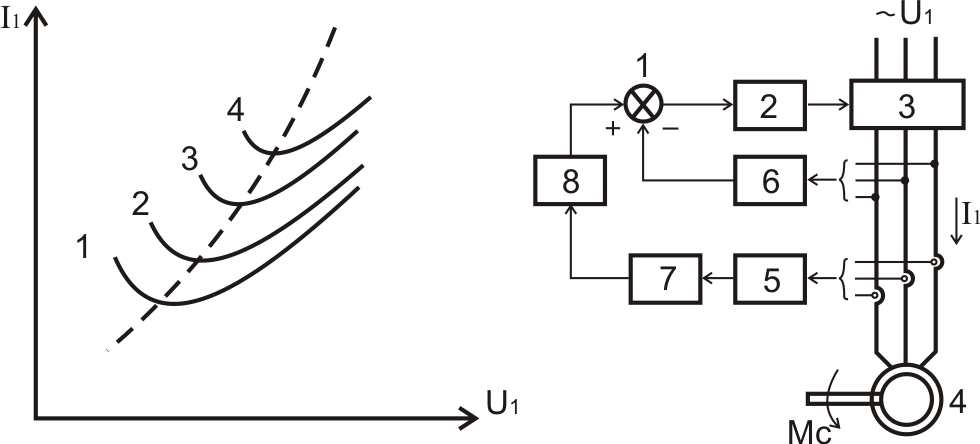
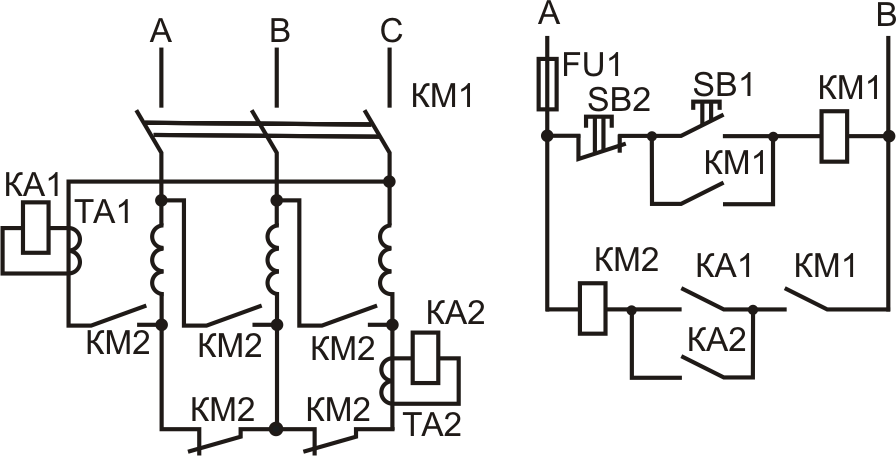
В процессе эксплуатации двигателя значительные потери энергии наблюдаются в переходных режимах и в первую очередь при его пуске. Потери энергии в переходных режимах могут быть заметно снижены за счет применения двигателей с меньшими значениями моментов инерции ротора, что достигается уменьшением диаметра ротора при одновременном увеличении его длины, так как мощность двигателя при этом должна оставаться неизменной. Например, так сделано в двигателях краново-металлургических серий, предназначенных для работы в повторно-кратковременном режиме с большим числом включений в час. Эффективным средством снижения потерь при пуске двигателей является пуск при постепенном повышении напряжения, подводимого к обмотке статора. Такой энергосберегающий способ пуска двигателя возможен только при работе двигателя в системе с регулируемым преобразователем: для асинхронных двигателей это устройства плавного пуска или преобразователи частоты, а для двигателей постоянного тока это электронные (тиристорные) устройства управления. Энергия, расходуемая при торможении двигателя, равна кинетической энергии, запасенной в движущихся частях электропривода при его пуске. Энергосберегающий эффект при торможении зависит от способа торможения. Наибольший энергосберегающий эффект происходит при генераторном рекуперативном торможении с отдачей энергии в сеть. При динамическом торможении двигатель отключается от сети, запасенная энергия рассеивается в двигателе и расхода энергии из сети не происходит. Наибольшие потери энергии наблюдаются при торможении противовключением, когда расход электроэнергии равен трехкратному значению энергии, рассеиваемой в двигателе при динамическом торможении. При установившемся режиме работы двигателя с номинальной нагрузкой потери энергии определяются номинальным значением КПД. Но если электропривод работает с переменной нагрузкой, то в периоды спада нагрузки КПД двигателя понижается, что ведет к росту потерь. Эффективным средством энергосбережения в этом случае является снижение напряжения, подводимого к двигателю в периоды его работы с недогрузкой. Рассмотрим принципы построения ЭП, в котором минимизируется потребляемый АД ток и тем самым потери электроэнергии в нем. Для этого обратимся к зависимостям тока статора I1 от напряжения U1(рис. 2) при разных моментах нагрузки Мc. Как видно из графиков 1...4, для каждого момента имеется такое напряжение, при котором потребляемыйАД ток из сети минимален. Штриховая линия, проведенная через точки минимумов тока для каждой нагрузки, определяет закон регулирования напряжения в функции тока, при реализации которого при любом Мc из сети потребляется минимальный ток. Требуемый закон управления ЭП реализуется с помощью положительной обратной связи по току. Трехфазный датчик 5 вырабатывает пропорциональный току сигнал, поступающий на вход функционального преобразователя 7 который обеспечивает требуемую зависимость между напряжением на АД и моментом нагрузки на его валу (штриховая линия на рис. 2). C помощью инерционного звена 8 обеспечивается необходимое качество переходных процессов. Кроме минимизации потерь электроэнергии, простыми средствами в такой схеме осуществляется повышение КПД и коэффициента мощности асинхронного ЭП. Этот способ энергосбережения возможно реализовать при работе двигателя в системе с регулируемым преобразователем при наличии в нем обратной связи по току нагрузки. Сигнал обратной связи по току корректирует сигнал управления преобразователем, вызывая уменьшение напряжения, подводимого к двигателю в периоды снижения нагрузки. Если же приводным является асинхронный двигатель, работающий при соединении обмоток статора «треугольником», то снижение подводимого к фазным обмоткам напряжения можно легко реализовать путем переключения этих обмоток на соединение «звездой», так как в этом случае фазное напряжение понижается в 1,73 раза. Этот метод целесообразен еще и потому, что при таком переключении повышается коэффициент мощности, что также способствует энергосбережению. Из справочной литературы следует, что при переключении обмоток с «треугольника» на «звезду» при снижении нагрузки до 50% относительно номинальной коэффициент мощности возрастает более чем на 20%. Примером практического применения этого способа энергосбережения может служить электропривод с асинхронным двигателем, работающий в условиях значительных колебаний нагрузки. Схема, приведенная на (рис.3), позволяет с помощью двух реле тока КА1 и КА2, катушки которых включены последовательно в фазные обмотки статора через измерительные трансформаторы тока ТА1 и ТА2, автоматизировать переключение обмотки статора с «треугольника» на «звезду» при снижении нагрузки двигателя на 40—50% относительно номинальной и обратное переключение при восстановлении нагрузки. При нажатии кнопки SВ1 «Пуск» включается силовой контактор КМ1, линейные контакты которого подключают двигатель к сети. Контактор КМ2 в начальный момент пуска остается невключенным и своими размыкающимися контактами соединяет обмотку статора «звездой». Но как только начинается пуск двигателя, значительный пусковой ток статора вызывает срабатывание реле тока КА2. При этом контактор КМ2 своими замыкающими контактами переключает обмотку статора «треугольником». Реле тока КА1 срабатывает, и двигатель переходит в рабочий режим.
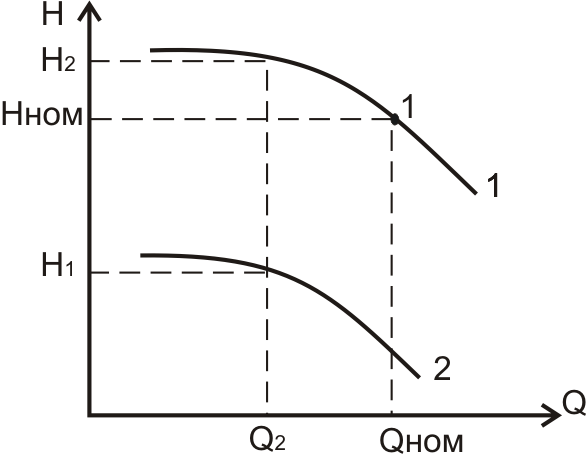
Применение регулируемого ЭП позволяет обеспечить энергосбережение в целом ряде технологических процессов, иногда во много раз превосходящее экономию энергии в самом ЭП. Например, регулирование скорости ленты транспортера с помощью ЭП, подающего детали в закалочную печь, позволяет минимизировать количество тепловой энергии на закалку в зависимости от их сортамента, технологии закалки и других факторов. Весьма эффективно регулируемый по скорости ЭП может обеспечить энергосбережение в таких рабочих машинах, как насосы, вентиляторы и компрессоры. Поскольку эти рабочие машины являются очень распространенными в промышленности, на транспорте, в сельском и жилищно-коммунальном хозяйствах и потребляют до 40% всей производимой электроэнергии, энергосбережение в этом случае оказывается очень эффективным. Рассмотрим эффект энергосбережения на примереЭПцентробежного насоса. Основной характеристикой насоса является зависимость создаваемого им напора (давления) Н от расхода водыQ ( рис. 4). На рисунке представлены характеристики H=f(Q) для двухскоростей приводного двигателя: номинальной (характеристика 1) и пониженной(характеристика 2).
Но, тот же расход воды можно обеспечить при меньшем напоре Н1, если с помощью ЭП снизить скорость двигателя до уровня, характеризующегося характеристикой 2. В этом случае из сети будет потребляться меньшая мощность. Примеры использования регулируемого ЭП насосов показывают, что экономия электроэнергии может доходить до 50% и более в зависимости от вида и режимов работы насосных установок. Кроме того, при работе сетей с меньшими напорами значительно меньше утечки воды в сетях и арматуре (на 15...20% и более). В насосах с ЭП переменного тока при регулировании скорости двигателей обычно применяются статические преобразователи частоты. Если электропривод не подвержен значительным регулировкам частоты вращения, частым пускам, реверсам и т.п., то повышенные затраты на тиристорное либо другое дорогостоящее оборудование могут оказаться неоправданными, а расходы, связанные с потерями энергии — незначительными. И наоборот, при интенсивной эксплуатации электропривода в переходных режимах применение электронных пускорегулирующих устройств становится целесообразным. К тому же следует иметь в виду, что эти устройства практически не нуждаются в уходе и их технико-экономические показатели, включая надежность, достаточно высоки. Необходимо, чтобы решение по применению дорогостоящих устройств электропривода подтверждалось технико-экономическими расчетами. Известно, что электрические потери в питающих сетях и обмотках электрических машин пропорциональны квадрату тока (Рэл = I2R). По этой причине желательно электропитание двигателей от сети с более высоким напряжением, так как при заданной мощности применение более высокого напряжения сопровождается уменьшением силы тока и, следовательно, сокращением потерь. Поэтому для низковольтных двигателей целесообразно применение напряжения 440 В (для двигателей постоянного тока) или 660 В (для двигателей переменного тока). Что же касается двигателей мощностью 500 кВт и более, то они обычно рассчитаны на напряжение 6000 или 10000 В. Решению проблемы энергосбережения способствует применение синхронных двигателей, создающих в питающей сети реактивные токи, опережающие по фазе напряжение. В итоге сеть разгружается от реактивной (индуктивной) составляющей тока, повышается коэффициент мощности на данном участке сети, что ведет к уменьшению тока в этой сети и, как следствие, к энергосбережению. Эти же цели преследует включение в сеть синхронных компенсаторов. Примером целесообразного применения синхронных двигателей является электропривод компрессорных установок, снабжающих предприятие сжатым воздухом. Для этого электропривода характерен пуск при небольшой нагрузке на валу, продолжительный режим работы при стабильной нагрузке, отсутствие торможений и реверсов. Такой режим работы вполне соответствует свойствам синхронных двигателей. Используя в синхронном двигателе режим перевозбуждения, можно достичь значительного энергосбережения в ма   Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ;
;

 .
.
 =
=  .
.