|
|
Системы подчиненного управления двигателем постоянного токаСтр 1 из 7Следующая ⇒ Системы подчиненного управления двигателем постоянного тока Частота вращения вала (далее скорость) и электромагнитный момент – это важнейшие координаты, характеризующие любой электропривод, в том числе построенный на машине постоянного тока (далее ДПТ). Управление скоростью и моментом ДПТ позволяет сформировать желаемый вид механической характеристики. Чья форма должна быть прямоугольной для большинства приложений (запустите представленную на чертеже 1 модель привода). Чертеж 1 Необходимость регулирования двух координат привода предполагает наличие двух обратных связей и двух регуляторов в системе (которые можно включить либо параллельно, либо последовательно). Распространены решения с последовательным включением регуляторов. Соответственно различают системы:
Общая идея настройки регуляторов заключается в том, что параметры регулятора скорости (РС) увязывают с механической постоянной двигателя и механизмов (Tмех=Rя·Jприв/(Cм·Φн)2), а параметры регулятора тока (РТ) (т.е. регулятора электромагнитного момента) – с электромагнитной постоянной времени обмотки якоря (Tэл=Lя/Rя). Последняя обычно от 2 до 100 раз меньше механической постоянной времени. По этой причине РТ должен быть более быстродействующим. Не смотря на тот факт, что реализуемый в РС закон допускает сохранение безынерционных свойств ("прозрачность") для области высоких частот; для практической реализации более предпочтительной является САР скорости ДПТ с подчиненным контуром регулирования электромагнитного момента. Система автоматического регулирования скорости двигателя постоянного тока с подчиненным контуром регулирования электромагнитного момента Модель САР скорости ДПТ с подчиненным контуром регулирования электромагнитного момента представлена на чертеже 2. Система управления состоит из последовательно включенных: ПИ-регулятора скорости (с пропорциональным и с интегрирующим параллельными каналами), программируемого ограничителя сигнала, ПИ-регулятора тока и безынерционного усилителя. Последний масштабирует выходное напряжение регулятора с целью питания якоря двигателя. Программируемый источник ЭДС, к которому подключен двигатель, представляет в модели управляемый широтно-импульсной последовательностью мостовой инвертер. К валу двигателя подключена программируемая нагрузка (активное ротационное сопротивление), которая включается с временной задержкой после разгона двигателя и выхода в режим стабилизации скорости. Типовой расчет (настройка) САР скорости ДПТ с подчиненным контуром регулирования электромагнитного момента
Чертеж 2 Реализовать описанную систему управления ДПТ можно либо на операционных усилителях (см. чертёж 3), либо на микроконтроллере. Первый способ целесообразно применять для маломощных электроприводов в случае, если не предполагается изменение момента инерции механической нагрузки. Блок программируемого ограничителя сигнала, для данного варианта СУ, так же реализуется на операционных усилителях и подключается к цепи ООС каскада регулятора скорости. Если электропривод должен с высоким качеством перемещать разные по величине инерционные массы, то постоянная времени интегрирующего канала РС должна соответствовать нагрузке. В этом случае предпочтителен более дорогой регулятор на микроконтроллере. С небольшими модификациями его программа может быть составлена по представленной на чертеже 2 блок-схеме. В частности, программируемый ограничитель сигнала целесообразно продублировать в интеграторе РС (амплитуда перерегулирования уменьшиться). Следует так же помнить, что на частотах кратных частоте синтеза выборок управляющего сигнала (т.е. выше рабочей полосы) цифровые регуляторы полностью подавляют сигнал. По этой причине желательно выполнение условия кратности частоты дискретизации частотам промышленной сети (50 Гц и/или 60 Гц). Соответствующие помехи будут в меньшей степени воздействовать на привод. Последнее замечание касается интегратора в РТ. Здесь нежелательны дополнительные фазовые сдвиги в области высоких частот (которые свойственны интегратору ERK11). Поэтому рекомендуется использовать либо метод трапеций (DERK12), либо метод Эйлера с упреждением по фазе (DERK11). Чертеж 3 ЛЕКЦИЯ 14 Статические преобразователи частоты
Лекция 15 Энергосбережение в АЭП
Энергосбережение — это комплекс правовых, технических и экономических мер, направленных на эффективное использование энергетических ресурсов. В соответствии с Федеральным законом РФ «Об энергосбережении» на промышленном предприятии должны быть разработаны мероприятия по экономии электроэнергии применительно к каждой электроустановке. В первую очередь это относится к устройствам с электрическим приводом, основной элемент которого электродвигатель. Известно, что более половины всей производимой в мире электроэнергии потребляется электродвигателями в электроприводах рабочих машин, механизмов, транспортных средств. Поэтому меры по экономии электроэнергии в электроприводах наиболее актуальны. Основные положения энергосбережения регламентированы государ-ственными стандартами РФ: ГОСТ Р 51379—99. Энергосбережение. Энергетический паспорт промышленного потребителя топливно-энергетических ресурсов. ГОСТ Р 31380—99. Энергосбережение. Методы подтверждения соответствия показателей энергетической эффективности энергопотребляющей продукции их нормативным значениям. Общие требования. ГОСТР 51387—99. Энергосбережение. Нормативно-методическое обеспечение. ГОСТР 51541-99. Энергосбережение. Энергетическая эффективность. Состав показателей. Задачи энергосбережения требуют оптимального решения не только в процессе эксплуатации электрических машин, но и при их проектировании.
При проектировании и эксплуатации разного рода электроприводов необходимо учитывать потребление и потери электроэнергии, влияние ЭП на сеть и другие электроприемники. Оценка этих свойств осуществляется с помощью так называемых энергетических показателей: коэффициента полезного действия, коэффициента мощности, потерь мощности и энергии. С целью уменьшения потерь энергии в период пуска или торможения двигатели к рабочим машинам подбирают таким образом, чтобы приведенный момент инерции привода при одной и той же скорости был наименьшим. Это реализуется за счет применения малогабаритных двигателей, имеющих пониженный J (двигатели с повышенным отношением длинны якоря к его диаметру, с полым или дисковым якорем). Целесообразно использование двух двигателей половинной мощности. Расчеты показывают; что?J двух двигателей половинной мощности оказывается меньше момента инерции одного двигателя на полную мощность. Например, два двигателя типа 4АН200 мощностью по 45 кВт имеющий суммарный момент инерции 2·1,38=2,76 кг·м2. Двигатель 4АН250 мощностью 90 кВт на ту же скорость имеет j=3,53 кг·м2, т.е. почти на 30% больше. Другой способ уменьшения потерь ЭП – регулирование скорости идеального холостого хода, что хорошо реализуется в ступенчатом пуске ЭП (для АД – регулирование частоты вращения с помощью частоты питающего тока или числа пар полюсов; для ДПТ – регулирование частоты вращения с помощью напряжения). При ступенчатом пуске отмечается снижение потерь электрической энергии в 2 раза. За счет изменения в переходном процессе w0 снижаются потери энергии в роторе АД. Уменьшение потерь энергии в роторе вызовет и снижение потерь в статоре и полных потерь в АД. Приведенный момент инерции ЭП зависит не только от момента инерции двигателя или рабочей машины, но и от передачи отношения между ними. Для уменьшение потерь энергии при пуске, передаточное отношение – i следует выбирать исходя из получения минимального приведенного момента инерции ЭП и проверять экономическим расчетом. КПД ЭП, как электромеханическая система определяется произведением преобразователя, управляющего устройства, электродвигателя и механической передачи?эп=?п·?уу·?эд·?мп. Наиболее значимой величиной является КПД двигателя, который растет с увеличением мощности и частоты вращения. КПД зависит также от развиваемой им полезной механической мощности на валу (рис. 1). Работа ЭП, как и любого другого потребителя характеризуется коэффициентом мощности сos Если Q не потребляется, то сos Рисунок 1 – Зависимость КПД и коэффициента мощности электродвигателя от кратности нагрузки
- ограничение времени работы на холостом ходу;
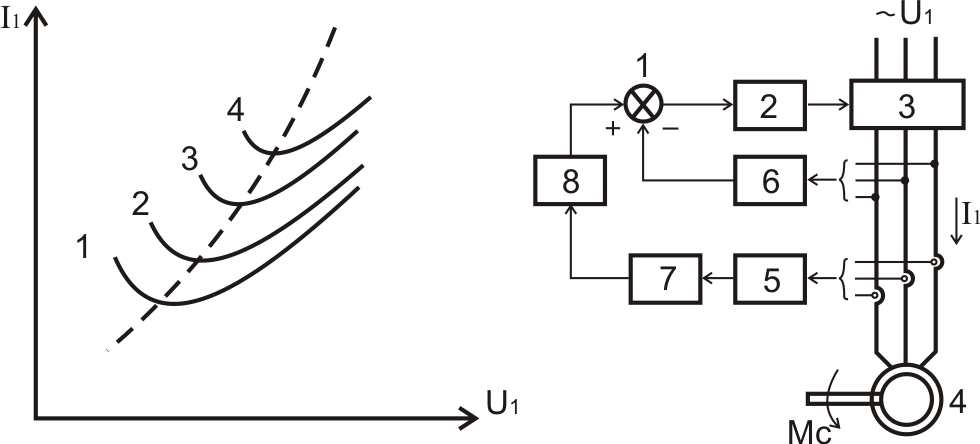
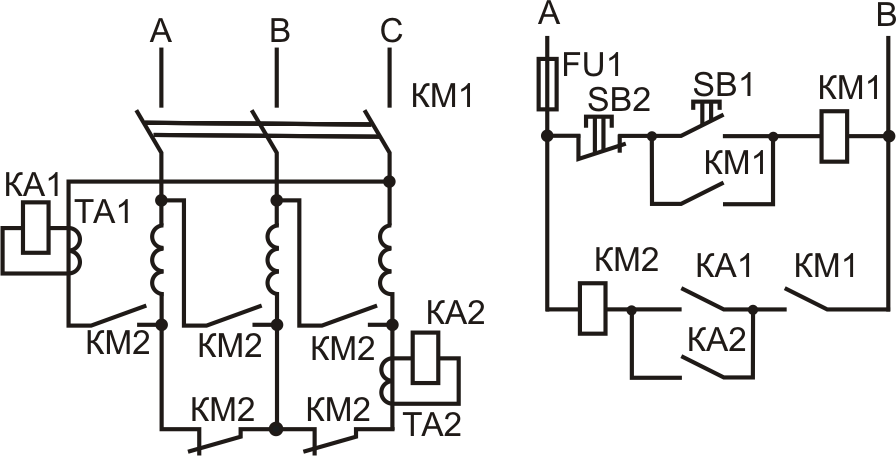
В процессе эксплуатации двигателя значительные потери энергии наблюдаются в переходных режимах и в первую очередь при его пуске. Потери энергии в переходных режимах могут быть заметно снижены за счет применения двигателей с меньшими значениями моментов инерции ротора, что достигается уменьшением диаметра ротора при одновременном увеличении его длины, так как мощность двигателя при этом должна оставаться неизменной. Например, так сделано в двигателях краново-металлургических серий, предназначенных для работы в повторно-кратковременном режиме с большим числом включений в час. Эффективным средством снижения потерь при пуске двигателей является пуск при постепенном повышении напряжения, подводимого к обмотке статора. Такой энергосберегающий способ пуска двигателя возможен только при работе двигателя в системе с регулируемым преобразователем: для асинхронных двигателей это устройства плавного пуска или преобразователи частоты, а для двигателей постоянного тока это электронные (тиристорные) устройства управления. Энергия, расходуемая при торможении двигателя, равна кинетической энергии, запасенной в движущихся частях электропривода при его пуске. Энергосберегающий эффект при торможении зависит от способа торможения. Наибольший энергосберегающий эффект происходит при генераторном рекуперативном торможении с отдачей энергии в сеть. При динамическом торможении двигатель отключается от сети, запасенная энергия рассеивается в двигателе и расхода энергии из сети не происходит. Наибольшие потери энергии наблюдаются при торможении противовключением, когда расход электроэнергии равен трехкратному значению энергии, рассеиваемой в двигателе при динамическом торможении. При установившемся режиме работы двигателя с номинальной нагрузкой потери энергии определяются номинальным значением КПД. Но если электропривод работает с переменной нагрузкой, то в периоды спада нагрузки КПД двигателя понижается, что ведет к росту потерь. Эффективным средством энергосбережения в этом случае является снижение напряжения, подводимого к двигателю в периоды его работы с недогрузкой. Рассмотрим принципы построения ЭП, в котором минимизируется потребляемый АД ток и тем самым потери электроэнергии в нем. Для этого обратимся к зависимостям тока статора I1 от напряжения U1(рис. 2) при разных моментах нагрузки Мc. Как видно из графиков 1...4, для каждого момента имеется такое напряжение, при котором потребляемыйАД ток из сети минимален. Штриховая линия, проведенная через точки минимумов тока для каждой нагрузки, определяет закон регулирования напряжения в функции тока, при реализации которого при любом Мc из сети потребляется минимальный ток. Требуемый закон управления ЭП реализуется с помощью положительной обратной связи по току. Трехфазный датчик 5 вырабатывает пропорциональный току сигнал, поступающий на вход функционального преобразователя 7 который обеспечивает требуемую зависимость между напряжением на АД и моментом нагрузки на его валу (штриховая линия на рис. 2). C помощью инерционного звена 8 обеспечивается необходимое качество переходных процессов. Кроме минимизации потерь электроэнергии, простыми средствами в такой схеме осуществляется повышение КПД и коэффициента мощности асинхронного ЭП. Этот способ энергосбережения возможно реализовать при работе двигателя в системе с регулируемым преобразователем при наличии в нем обратной связи по току нагрузки. Сигнал обратной связи по току корректирует сигнал управления преобразователем, вызывая уменьшение напряжения, подводимого к двигателю в периоды снижения нагрузки. Если же приводным является асинхронный двигатель, работающий при соединении обмоток статора «треугольником», то снижение подводимого к фазным обмоткам напряжения можно легко реализовать путем переключения этих обмоток на соединение «звездой», так как в этом случае фазное напряжение понижается в 1,73 раза. Этот метод целесообразен еще и потому, что при таком переключении повышается коэффициент мощности, что также способствует энергосбережению. Из справочной литературы следует, что при переключении обмоток с «треугольника» на «звезду» при снижении нагрузки до 50% относительно номинальной коэффициент мощности возрастает более чем на 20%. Примером практического применения этого способа энергосбережения может служить электропривод с асинхронным двигателем, работающий в условиях значительных колебаний нагрузки. Схема, приведенная на (рис.3), позволяет с помощью двух реле тока КА1 и КА2, катушки которых включены последовательно в фазные обмотки статора через измерительные трансформаторы тока ТА1 и ТА2, автоматизировать переключение обмотки статора с «треугольника» на «звезду» при снижении нагрузки двигателя на 40—50% относительно номинальной и обратное переключение при восстановлении нагрузки. При нажатии кнопки SВ1 «Пуск» включается силовой контактор КМ1, линейные контакты которого подключают двигатель к сети. Контактор КМ2 в начальный момент пуска остается невключенным и своими размыкающимися контактами соединяет обмотку статора «звездой». Но как только начинается пуск двигателя, значительный пусковой ток статора вызывает срабатывание реле тока КА2. При этом контактор КМ2 своими замыкающими контактами переключает обмотку статора «треугольником». Реле тока КА1 срабатывает, и двигатель переходит в рабочий режим.
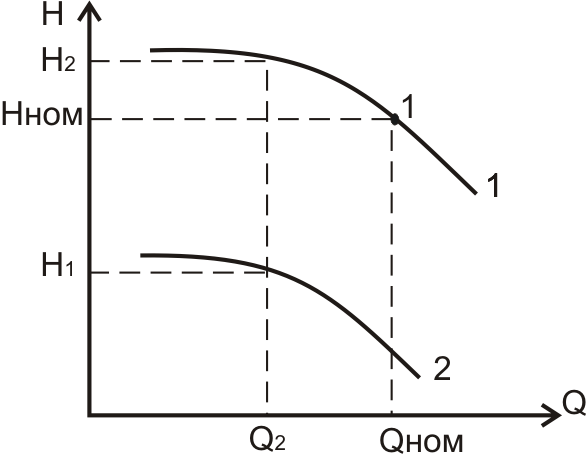
Применение регулируемого ЭП позволяет обеспечить энергосбережение в целом ряде технологических процессов, иногда во много раз превосходящее экономию энергии в самом ЭП. Например, регулирование скорости ленты транспортера с помощью ЭП, подающего детали в закалочную печь, позволяет минимизировать количество тепловой энергии на закалку в зависимости от их сортамента, технологии закалки и других факторов. Весьма эффективно регулируемый по скорости ЭП может обеспечить энергосбережение в таких рабочих машинах, как насосы, вентиляторы и компрессоры. Поскольку эти рабочие машины являются очень распространенными в промышленности, на транспорте, в сельском и жилищно-коммунальном хозяйствах и потребляют до 40% всей производимой электроэнергии, энергосбережение в этом случае оказывается очень эффективным. Рассмотрим эффект энергосбережения на примереЭПцентробежного насоса. Основной характеристикой насоса является зависимость создаваемого им напора (давления) Н от расхода водыQ ( рис. 4). На рисунке представлены характеристики H=f(Q) для двухскоростей приводного двигателя: номинальной (характеристика 1) и пониженной(характеристика 2).
Но, тот же расход воды можно обеспечить при меньшем напоре Н1, если с помощью ЭП снизить скорость двигателя до уровня, характеризующегося характеристикой 2. В этом случае из сети будет потребляться меньшая мощность. Примеры использования регулируемого ЭП насосов показывают, что экономия электроэнергии может доходить до 50% и более в зависимости от вида и режимов работы насосных установок. Кроме того, при работе сетей с меньшими напорами значительно меньше утечки воды в сетях и арматуре (на 15...20% и более). В насосах с ЭП переменного тока при регулировании скорости двигателей обычно применяются статические преобразователи частоты. Если электропривод не подвержен значительным регулировкам частоты вращения, частым пускам, реверсам и т.п., то повышенные затраты на тиристорное либо другое дорогостоящее оборудование могут оказаться неоправданными, а расходы, связанные с потерями энергии — незначительными. И наоборот, при интенсивной эксплуатации электропривода в переходных режимах применение электронных пускорегулирующих устройств становится целесообразным. К тому же следует иметь в виду, что эти устройства практически не нуждаются в уходе и их технико-экономические показатели, включая надежность, достаточно высоки. Необходимо, чтобы решение по применению дорогостоящих устройств электропривода подтверждалось технико-экономическими расчетами. Известно, что электрические потери в питающих сетях и обмотках электрических машин пропорциональны квадрату тока (Рэл = I2R). По этой причине желательно электропитание двигателей от сети с более высоким напряжением, так как при заданной мощности применение более высокого напряжения сопровождается уменьшением силы тока и, следовательно, сокращением потерь. Поэтому для низковольтных двигателей целесообразно применение напряжения 440 В (для двигателей постоянного тока) или 660 В (для двигателей переменного тока). Что же касается двигателей мощностью 500 кВт и более, то они обычно рассчитаны на напряжение 6000 или 10000 В. Решению проблемы энергосбережения способствует применение синхронных двигателей, создающих в питающей сети реактивные токи, опережающие по фазе напряжение. В итоге сеть разгружается от реактивной (индуктивной) составляющей тока, повышается коэффициент мощности на данном участке сети, что ведет к уменьшению тока в этой сети и, как следствие, к энергосбережению. Эти же цели преследует включение в сеть синхронных компенсаторов. Примером целесообразного применения синхронных двигателей является электропривод компрессорных установок, снабжающих предприятие сжатым воздухом. Для этого электропривода характерен пуск при небольшой нагрузке на валу, продолжительный режим работы при стабильной нагрузке, отсутствие торможений и реверсов. Такой режим работы вполне соответствует свойствам синхронных двигателей. Используя в синхронном двигателе режим перевозбуждения, можно достичь значительного энергосбережения в масштабе всего предприятия. С аналогичной целью применяют силовые конденсаторные установки («косинусные» конденсаторы). Создавая в сети ток, опережающий по фазе напряжение, эти установки частично компенсируют индуктивные (отстаю- щие по фазе) токи, что ведет к повышению коэффициента мощности сети, а следовательно, к энергосбережению. Наиболее эффективным является применение конденсаторных установок типа УКМ 58 с автоматическим поддержанием заданного значения коэффициента мощности и со ступенчатым изменением реактивной мощности в диапазоне от 20 до 603 квар при напряжении 400 В. Необходимо помнить, что энергосбережение направлено на решение не только экономических, но и Триггер (триггерная система) — класс электронных устройств, обладающих способностью длительно находиться в одном из двух устойчивых состояний и чередовать их под воздействием внешних сигналов. Каждое состояние триггера легко распознаётся по значению выходного напряжения. По характеру действия триггеры относятся к импульсным устройствам — их активные элементы (транзисторы, лампы) работают в ключевом режиме, а смена состояний длится очень короткое время. Отличительной особенностью триггера как функционального устройства является свойство запоминания двоичной информации. Под памятью триггера подразумевают способность оставаться в одном из двух состояний и после прекращения действия переключающего сигнала. Приняв одно из состояний за «1», а другое за «0», можно считать, что триггер хранит (помнит) один разряд числа, записанного в двоичном коде. При изготовлении триггеров применяются преимущественно полупроводниковые приборы (обычно биполярные и полевые транзисторы), в прошлом — электромагнитные реле, электронные лампы. В настоящее время логические схемы, в том числе с использованием триггеров, создают в интегрированных средах разработки под различные программируемые логические интегральные схемы (ПЛИС). Используются, в основном, в вычислительной технике для организации компонентов вычислительных систем: регистров, счётчиков, процессоров, ОЗУ. Содержание
История
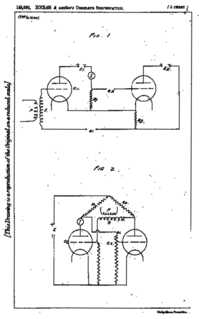
Рис.2 Схемы из патента Икклза и Джордана 1918 г., один (рис.1) нарисован как два инвертирующих каскада усилителя с положительной обратной связью, другой (рис.2) как симметричная перекрёстносвязанная пара. Разрывные характеристики электронных ламп, на которых основано действие триггеров, впервые под названием «катодное реле» были описаны М. А. Бонч-Бруевичем в 1918 г.[1] Практическая схема триггера была опубликована 5 августа 1920 года У. Г. Икклзом (англ.)русск. и Ф. У. Джорданом (англ.)русск. в патенте Великобритании № 148582 заявленном 21 июня 1918 г.[2] и в статье «Переключающее реле, использующее трёхэлектродные вакуумные лампы»[3] от 19 сентября 1919 года. Определения У этого термина существуют и другие значения, см. Триггер (значения). Триггер (бистабильный мультивибратор[4]) — это цифровой автомат, имеющий несколько входов и 2 выхода. Триггер — это устройство последовательностного типа с двумя устойчивыми состояниями равновесия, предназначенное для записи и хранения информации. Под действием входных сигналов триггер может переключаться из одного устойчивого состояния в другое. При этом напряжение на его выходе скачкообразно изменяется. Триггерами называют[5] такие логические устройства, выходные сигналы которых определяются не только сигналами на входах, но и предысторией их работы, то есть состоянием элементов памяти. Триггер — один из базовых (основных) элементов цифровой техники[6]. Некоторые исследователи[7] включают триггер в 100 великих изобретений. Триггер не является логическим элементом первого уровня, а сам состоит из логических элементов первого уровня — инверторов или логических вентилей. По отношению к логическим элементам первого уровня триггер является логическим устройством второго уровня. Триггер — элементарная ячейка оперативной памяти. Триггер — простейшее устройство, выполняющее логическую функцию с обратной связью, то есть простейшее устройство кибернетики. N-ичный триггер — устройство (элементарная переключаемая ячейка памяти, переключатель с N устойчивыми положениями), которое имеет N устойчивых состояний и возможность переключения из любого состояния в любое другое состояние. Триггер - это логическое устройство с двумя устойчивыми состояниями 0 и 1, имеющие несколько входов и два выхода,один прямой, а другой инверсный. Классификация
Рис. 3. Временная диаграмма работы динамического триггера
Рис. 4. Симметричные триггеры: а — с непосредственной связью между каскадами; б — с резистивной связью
Рис. 5. Функциональная классификация триггеров
Рис. 6. Классификация триггеров по способу ввода информации Триггеры подразделяются на две большие группы — динамические и статические. Названы они так по способу представления выходной информации. Динамический триггер представляет собой управляемый генератор, одно из состояний которого (единичное) характеризуется наличием на выходе непрерывной последовательности импульсов определённой частоты, а другое (нулевое) — отсутствием выходных импульсов. Смена состояний производится внешними импульсами (рис. 3). Динамические триггеры в настоящее время используются редко. К статическим триггерам относят устройства, каждое состояние которых характеризуется неизменными уровнями выходного напряжения (выходными потенциалами): высоким — близким к напряжению питания и низким — около нуля. Статические триггеры по способу представления выходной информации часто называют потенциальными. Статические (потенциальные) триггеры, в свою очередь, подразделяются на две неравные по практическому значению группы — симметричные и несимметричные триггеры. Оба класса реализуются на двухкаскадном двухинверторном усилителе с положительной обратной связью, а названием своим они обязаны способам организации внутренних электрических связей между элементами схемы. Симметричные триггеры отличает симметрия схемы и по структуре, и по параметрам элементов обоих плеч. Для несимметричных триггеров характерна неидентичность параметров элементов отдельных каскадов, а также и связей между ними. Симметричные статические триггеры составляют основную массу триггеров, используемых в современной радиоэлектронной аппаратуре. Схемы симметричных триггеров в простейшей реализации (2х2ИЛИНЕ) показаны на рис. 4. Основной и наиболее общий классификационный признак — функциональный — позволяет систематизировать статические симметричные триггеры по способу организации логических связей между входами и выходами триггера в определённые дискретные моменты времени до и после появления входных сигналов. По этой классификации триггеры характеризуются числом логических входов и их функциональным назначением (рис. 5). Вторая классификационная схема, независимая от функциональной, характеризует триггеры по способу ввода информации и оценивает их по времени обновления выходной информации относительно момента смены информации на входах (рис. 6). Каждая из систем классификации характеризует триггеры по разным показателям и поэтому дополняет одна другую. К примеру, триггеры RS-типа могут быть в синхронном и асинхронном исполнении. Асинхронный триггер изменяет своё состояние непосредственно в момент появления соответствующего информационного сигнала(ов), с некоторой задержкой равной сумме задержек на элементах, составляющих данный триггер. Синхронные триггеры реагируют на информационные сигналы только при наличии соответствующего сигнала на так называемом входе синхронизации С (от англ. clock). Этот вход также обозначают термином «такт». Такие информационные сигналы называют синхронными. Синхронные триггеры в свою очередь подразделяют на триггеры со статическим и с динамическим управлением по входу синхронизации С. Триггеры со статическим управлением воспринимают информационные сигналы при подаче на вход С логической единицы (прямой вход) или логического нуля (инверсный вход). Триггеры с динамическим управлением воспринимают информационные сигналы при изменении (перепаде) сигнала на входе С от 0 к 1 (прямой динамический С-вход) или от 1 к 0 (инверсный динамический С-вход). Также встречается название «триггер управляемый фронтом». Одноступенчатые триггеры (latch, защёлки) состоят из одной ступени представляющей собой элемент памяти и схему управления, бывают, как правило, со статическим управлением. Одноступенчатые триггеры с динамическим управлением применяются в первой ступени двухступенчатых триггеров с динамическим управлением. Одноступенчатый триггер на УГО обозначают одной буквой - Т. Двухступенчатые триггеры (flip-flop, шлёпающие) делятся на триггеры со статическим управлением и триггеры с динамическим управлением. При одном уровне сигнала на входе С информация, в соответствии с логикой работы триггера, записывается в первую ступень (вторая ступень заблокирована для записи). При другом уровне этого сигнала происходит копирование состояния первой ступени во вторую (первая ступень заблокирована для записи), выходной сигнал появляется в этот момент времени с задержкой равной задержке срабатывания ступени. Обычно двухступенчатые триггеры применяются в схемах, где логические функции входов триггера зависят от его выходов, во избежание временны́х гонок. Двухступенчатый триггер на УГО обозначают двумя буквами - ТТ. Триггеры со сложной логикой бывают также одно- и двухступенчатые. В этих триггерах наряду с синхронными сигналами присутствуют и асинхронные. Такой триггер изображён на рис. 1, верхний (S) и нижний (R) входные сигналы являются асинхронными. Триггерные схемы классифицируют также по следующим признакам:
Базовые понятия Триггер — это запоминающий элемент с двумя (или более) устойчивыми состояниями, изм   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  Что будет с Землей, если ось ее сместится на 6666 км? Что будет с Землей? - задался я вопросом...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 =
=  .
.