
|
|
МЕТОДЫ ИЗМЕРЕНИЯ ВЫСОТЫ ПОЛЕТА
Известны барометрический, радиоволновой, акустический, оптический и инерциальный методы измерения высоты полета. 1. Барометрический метод [4], [6]
Барометрический метод измерения высоты полета основан на зависимости атмосферного давления от высоты (давление воздуха на любом уровне определяется весом столба воздуха, расположенного выше этого уровня). Функциональная связь между высотой Н и давлением р не является однозначной, а изменяется в зависимости от географической широты, времени года, времени суток и состояния погоды. Однако путем статической обработки результатов многолетних метеорологических наблюдений установлена среднестатистическая зависимость p=f(H), принятая в качестве стандартной международной атмосферы и используемая при градуировке барометрических высотомеров. Барометрический высотомер измеряет барометрическую высоту полета, т. е. высоту относительно некоторого уровня, давление воздуха на котором известно. Барометрический метод и приборы, используемые при применении этого метода, более подробно рассматриваются в § 11.3 и 11.4. 2. Радиоволновой метод [2]
Радиоволновой метод измерения высоты полета основан на отражении радиоволн от земной поверхности.Устройства, построенные по этому принципу, измеряют истинную высоту полета и называются радиовысотомерами. Различают радиовысотомеры непрерывного и импульсного действия (рис. 11.2, а и б). Блок-схема радиовысотомера непрерывного действия приведена на рис. 11.2, а. Антенна А1 радиопередатчика, установленного на самолете, непрерывно излучает электромагнитные волны, которые, отражаясь от земной поверхности, возвращаются к самолету (рис. 11.3). Антенна А2 радиоприемника, также находящегося на самолете, принимает как излучаемые антенной А1 так и отраженные от Земли радиоволны. Особенностью радиовысотомеров непрерывного излучения является частотная модуляция излучаемых колебаний. На рис. 11.4 приведен график изменения во времени частоты f1 излучаемых колебаний (сплошная линия) и частоты f2 отраженных колебаний (пунктирная линия). Линия частот f2 сдвинута в сторону отставания относительно линии частот f1 на величину
следовательно,
где t1 – время прохождения радиоволн прямого излучения от антенны передатчика до приемной антенны, t2 – время прохождения радиоволн от передатчика до Земли и обратно до приемной антенны. В соответствии с рис.11.3
где l – расстояние между передающей и приемной антенной, Н – истинная высота полета, Подставляя (11.2) в (11.1), находим
Разность частот F=f1-f2, выделяемая в детекторе низкой частоты и измеряемая частотомером, служит мерой истинной высоты полета.
Для определения зависимости F от H запишем уравнение отрезков ломанных линий, характеризующих закон измерения частот f1 и f2 (см. рис. 11.4):
Разность частот
Поскольку Н>>l, то можно пренебречь в числителе l по сравнению с 2Н, тогда где Чувствительность тем больше, чем больше среднее значение частоты f0 и чем больше коэффициент а, характеризующий глубину модуляции частоты. Величина среднего значения частоты равна f0 =400ч-600 Мгц, а амплитуда изменения частоты равна ±0,5% от среднего значения при диапазоне измеряемых высот от 0 до 1500 м. При посадке самолета прибор переключается на малый диапазон (от 0 до 150 ж), при этом амплитуда модуляции частоты увеличивается в 10 раз — до ±5% от среднего значения частоты. Основные погрешности радиовысотомера непрерывного действия следующие: а) погрешности от помех приемопередающего радиотракта, искажающих принимаемый сигнал; б) погрешности от нестабильности параметров f0 и а, вызывающие изменение чувствительности S, а следовательно, и масштаба измерения.
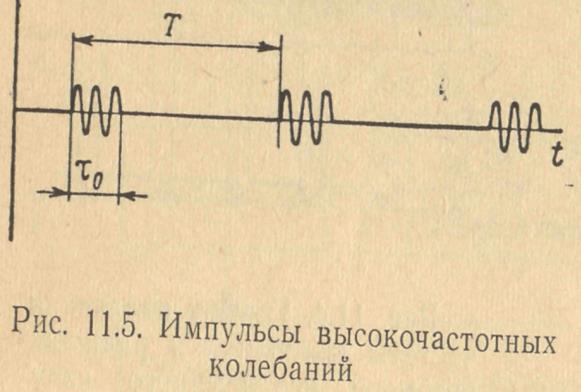
С увеличением высоты полета мощность отраженного сигнала резко падает и он становится трудноразличимым на фоне радиопомех. Интенсивность полезного сигнала можно увеличить за счет повышения мощности радиопередатчика, однако его потребная мощность увеличивается пропорционально 4-й степени увеличения высоты. Например, для увеличения диапазона радиовысотомера непрерывного изучения с 1500 до 15000 м, мощность радиопередатчика пришлось бы увеличить в 10 000 раз. Измерение больших высот полета осуществляется радиовысотомером импульсного действия, работающего как радиолокатор. Радиовысотомер (см. рис. 11.2,6) содержит приемник и передатчик, причем излучение радиоволн производится не непрерывно, а дискретно (импульсами), в течение очень коротких интервалов времени, разделенных значительно более длительными паузами (рис. 11.5). Соотношение между мгновенной мощностью Римп, излучаемой в пространстве в импульсе и средней мощностью Рср передатчика равно
где Т — период между импульсами;
Процесс измерения высоты радиовысотомером импульсного действия сводится к следующему. Приемная антенна принимает два последовательных импульса — прямой и отраженный от Земли. Оба импульса усиливаются и подаются на катодно-лучевую трубку, где воздействуют на электронный луч с круговой разверткой (рис. 11.6). Если движение луча по окружности от нулевой отметки шкалы будет начинаться в момент времени прихода прямого импульса, а во время прихода отраженного импульса электронный луч получит радиальный всплеск, то угловое положение, а этого всплеска будет пропорциональным измеряемой высоте:
где
Чувствительность 5 и соответственно точность отсчета показаний можно увеличить путем увеличения скорости развертки Получение однозначных показаний достигается переключением диапазонов: при-малой скорости развертки производится грубый отсчет высоты, а при большой скорости делается точный отсчет'. Погрешности радиовысотомеров импульсного действия складываются из погрешностей от радиопомех и погрешностей от непостоянства угловой скорости развертки. Радиовысотомер импульсного изучения непригоден для отсчета очень малых высот (при посадке самолета), так как он обладает сравнительно большой зоной нечувствительности, обусловленной тем, что на малых высотах время Акустический метод
Акустический метод измерения высоты полета аналогичен радиоволновому, но отличается лишь тем, что вместо электромагнитных колебаний генерируются на самолете и отражаются от Земли звуковые колебания. Основанный на этом принципе действия акустический высотомер состоит из источника звука А1 и приемника звука А2, расположенных на самолете на расстоянии l друг от друга аналогично приемной и передающей антенне радиовысотомера (см. рис. 11.3). Время прохождения звукового сигнала от самолета до Земли и обратно после его отражения зависит от скорости движения самолета (рис. 11.7):
где к — постоянная адиабаты, равная для воздуха 1,4; R — газовая постоянная (R =29,27 м/град); Т — абсолютная температура воздуха в °К; V — скорость полета в м\сек. Прямой сигнал может быть передан от источника звука к приемнику звука не по воздуху, а по проводам (непосредственно от электрического генератора звуковых колебаний). В этом случае время прохождения прямого сигнала Интервал времени между приемом прямого и отраженного сигналов
Учитывая, что время t1 пренебрежимо мало по сравнению с t2, получим
Измеряя интервал времени Способы измерения т могут быть такими же, как и в радиовысотомерах, к ним относят: способ частотной модуляции излучаемых звуковых колебаний с выделением разности частот прямых и отраженных сигналов или же способ, основанный на импульсном излучении звука с определением расстояния между прямым и отраженным импульсом на катодно-лучевой трубке. Акустическому высотомеру присущи следующие методические погрешности, которые отсутствуют у радиовысотомеров: а) температурная погрешность, обусловленная тем, что скорость распространения звука в воздухе пропорциональна корню квадратному из абсолютной температуры; эта погрешность изменяет чувствительность прибора (масштаб измерения); температурная погрешность может быть уменьшена путем измерения температуры окружающего воздуха и введением в прибор схемы температурной компенсации; б) скоростная погрешность, обусловленная тем, что время прохождения звукового сигнала от самолета до Земли и обратно зависит от скорости движения летательного аппарата (11.4). При скорости полета, превышающей скорость звука, отраженный сигнал вообще никогда не вернется на самолет, из-за чего акустический метод измерения высоты неприменим при полете со сверхзвуковой скоростью; в) погрешность от помех, создаваемых шумом авиадвигателя; относительная величина этой погрешности возрастает с увеличением высоты, поскольку при этом уменьшается мощность отраженного сигнала. 4. Оптический метод [9]
Оптический метод измерения высоты полета аналогичен радиоволновому и основан на отражении от Земли светового луча. Передатчиком служит оптический квантовый генератор (лазер), приемником — фотоэлемент. Соотношение, определяющее временной интервал Другой вариант оптического метода основан на измерении вертикальных углов земных ориентиров (вертикальный угол — это угол между направлением на земной ориентир и вертикалью). Если с помощью оптического визира измерить вертикальный угол
5. Инерциальный метод [13]
Инерциальный метод измерения высоты полета основан на двойном интегрировании вертикального ускорения летательного аппарата. Высотомер, построенный по этому принципу, состоит из акселерометра (датчика линейных ускорений) и интегрирующего устройства. Ось чувствительности акселерометра ориентирована по направлению земной вертикали с помощью гиростабилизированной платформы. Сигнал акселерометра пропорционален алгебраической сумме вертикального ускорения
Для исключения погрешности, вызванной интегрированием ускорения силы тяжести, на вход интегрирующего устройства необходимо подавать разность
где u2 = Kg — постоянный сигнал, компенсирующий влияние силы тяжести. При этом сигнал на выходе интегрирующего устройства (после двойного интегрирования) будет
где Н0 — высота, соответствующая началу интегрирования. Если интегрирование начинается в момент взлета (Н0 = 0), то сигнал инерциального высотомера будет пропорционален относительной высоте полета (относительно места взлета). Погрешности инерциальцого высотомера складываются из погрешностей акселерометра (в том числе погрешностей из-за неточной ориентации оси его чувствительности по вертикали), погрешностей от неточной компенсации силы тяжести и погрешностей интегрирующего устройства. Основным недостатком метода является нарастание погрешности с течением времени (постоянная погрешность на входе интегратора дважды интегрируется и погрешность на выходе интегратора возрастает пропорционально квадрату времени). Поэтому для реализации инерциального метода необходимы прецизионные устройства. В результате сопоставления рассмотренных методов можно установить, что истинную высоту полета измеряют радиовысотомеры, акустические и оптические высотомеры, т. е. высотомеры, основанные на свойствах земной поверхности отражать волновые колебания; инерциальный высотомер измеряет относительную высоту Нотн, а барометрический высотомер — барометрическую высоту Нбар. Акустический и оптический методы практически не используются на летательных аппаратах: акустический метод принципиально неприменим на сверхзвуковых скоростях полета, а на дозвуковых он не нашел применения из-за больших погрешностей, однако не исключена возможность его использования для построения посадочного прибора; оптический метод пока еще не получил практического применения, но не исключено его использование по мере развития конструкций оптических квантовых генераторов. Основное применение на летательных аппаратах нашли барометрический, радиотехнический и в меньшей степени инерциальный методы измерения высоты полета. Область применения инерциального метода ограничена летательными аппаратами кратковременного действия из-за нарастания с течением времени погрешностей измерения высоты. Ниже излагаются теория и особенности конструкции барометрических высотомеров.
  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 вследствие того, что в каждый момент времени частота отраженного сигнала отличается от частоты прямого сигнала на величину, равную изменению частоты прямого излучения за время
вследствие того, что в каждый момент времени частота отраженного сигнала отличается от частоты прямого сигнала на величину, равную изменению частоты прямого излучения за время 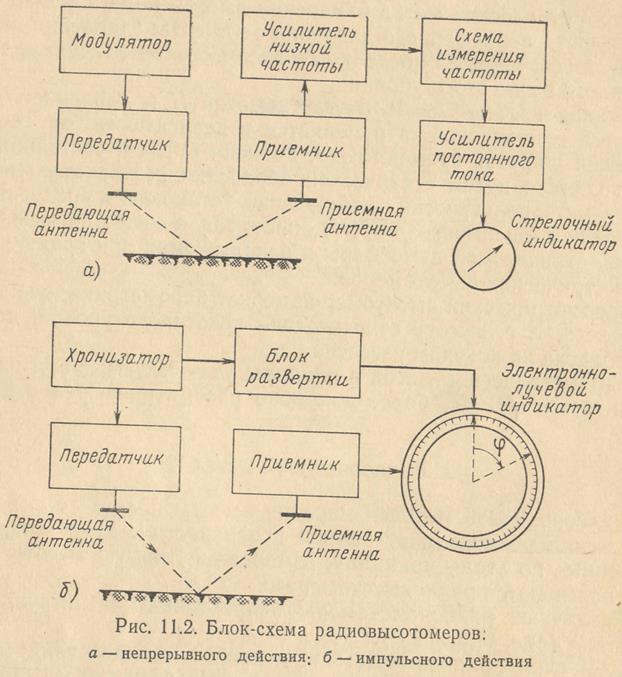

 ,
,

 .
. .
. .
. - чувствительность радиовысотомера непрерывного излучения.
- чувствительность радиовысотомера непрерывного излучения.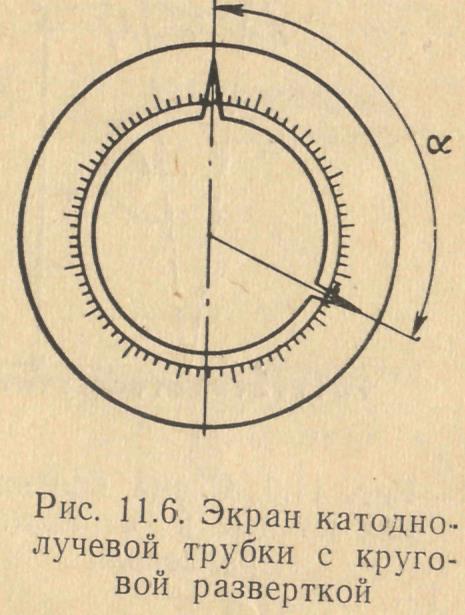
 ,
, — длительность импульса.
— длительность импульса. ,
, -чувствительность прибора;
-чувствительность прибора; — угловая скорость развертки электронного луча.
— угловая скорость развертки электронного луча.
 ,
, — скорость распространения звука в воздухе в м/сек;
— скорость распространения звука в воздухе в м/сек; сек.
сек. .
. сек.
сек. некоторого ориентира, лежащего на линии полета на заранее известном расстоянии s, то высота полета может быть вычислена по формуле
некоторого ориентира, лежащего на линии полета на заранее известном расстоянии s, то высота полета может быть вычислена по формуле  . Этот метод применим в основном для контроля других типов высотомеров во время полета.
. Этот метод применим в основном для контроля других типов высотомеров во время полета. и ускорения силы тяжести g:
и ускорения силы тяжести g: .
.
 ,
,