|
|
РЕГУЛИРОВАНИЯ. ПРОМЫШЛЕННЫЕ РЕГУЛЯТОРЫОсновные понятия и определения ТАР Регулированием называется воздействие на объект с целью привести его в желаемое состояние или положение. Любой технологический процесс характеризуется определенным набором технологических параметров – физических величин, которые в указанном процессе поддерживаются постоянными или изменяются по какому-либо закону. Эти величины называются регулируемыми параметрами. К технологическим параметрам, оказывающим существенное влияние на большинство технологических процессов, можно отнести следующие параметры: • Т – температура; • Р – давление; • L – уровень; • F – расход и некоторые другие. Кроме того, технологические процессы подвержены действию различных факторов, случайных по своей природе, которые нельзя заранее предусмотреть. Такие факторы называются возмущающими воздействиями или возмущениями. К ним относятся: • изменение нагрузки; • воздействие внешней среды; • воздействие внутренних помех. Возмущающие воздействия на технологический процесс вызывают отклонения параметров от их оптимальных значений. Нормальный ход процесса нарушается. Таким образом, возникает необходимость в регулировании протекания технологических процессов. Автоматическим регулированием называется процесс поддержания на заданном уровне или изменения по какому-либо закону параметров в технических устройствах, осуществляемый с помощью автоматических регуляторов без непосредственного участия человека. Объектом регулирования называется технологический процесс вместе с техническим оборудованием, в котором он протекает. Автоматическим регулятором называется техническое устройство, которое уменьшает или совсем ликвидирует отклонение регулируемого параметра от его заданного значения. Системой автоматического регулирования называется совокупность объекта регулирования и автоматического регулятора, взаимодействие которых приводит к выполнению поставленной цели регулирования. В общем виде систему автоматического регулирования (далее САР) и её взаимодействие с внешней средой можно представить в виде структурной схемы.
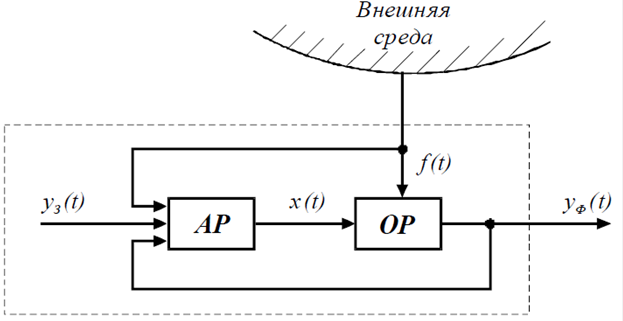
Рис. 1.1. Структурная схема САР: f(t) – возмущающее воздействие, нарушающее нормальную работу объекта регулирования; yФ(t) – регулируемый параметр, характеризует желаемое состояние или положение объекта регулирования; yЗ(t) – задающее воздействие (задание), содержащее информацию об оптимальном значении регулируемого параметра или законе его изменения; х(t) – регулирующее воздействие, которое уменьшает или совсем ликвидирует отклонение регулируемого параметра от его заданного значения
На вход САР подаётся задающее воздействие yЗ. Регулирующее воздействие х(t) вырабатывается в результате обработки информации о регулируемом параметре yФ, задающем воздействии yЗ и возмущающем воздействии f(t). Возможно построение САР использующих только часть информации. Классификация САР Классифицировать САР можно по большому числу признаков. Выделим главные из них, наиболее существенные с позиций теории автоматического регулирования. По принципам регулирования: 1. По задающему воздействию При регулировании только по задающему воздействию yЗ, не учитываются действительное значение регулируемого параметра уФ (t) и возмущающего воздействия f(t). Подобные САР дают удовлетворительное качество регулирования лишь при высокой стабильности параметров системы и внешней среды и при невысоких требованиях к точности регулирования. 2. По возмущению
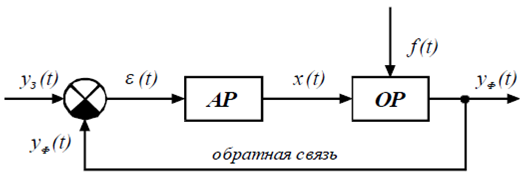
Рис. 1.2. Структурная схема САР по возмущению При регулировании по возмущению после предварительного измерения возмущающего воздействия f (t) осуществляется регулирующее воздействие на объект регулирования компенсирующее это возмущение. Недостатки: 1. Регулирование осуществляется лишь по тому возмущению, которое измеряется регулятором. При наличии других возмущений задача регулирования не выполняется. 2. Отклонение с течением времени может увеличиваться из-за нестабильности параметров САР. 3. Отклонение существенно зависит от инерционности САР. Существуют САР, регулирующие по двум воздействиям: задающему уЗ(t) и возмущающему f(t). Пример 1. Регулирование уровня жидкости в емкости. Объект регулирования – емкость, с притоком и потреблением. Цель регулирования – поддерживать заданный уровень жидкости при действии возмущения – расхода жидкости на потребление. Регулирующее воздействие – расход жидкости на притоке.
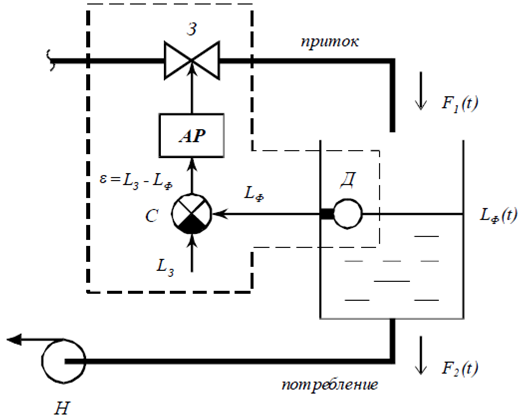
Рис. 1.3. Регулирование уровня жидкости в емкости по возмущению: АР – автоматический регулятор, Д – датчик расхода, З – задвижка, Н – насос Регулятор измеряет потребление F2 и открывает задвижку, чтобы обеспечить равенство притока и потребления: F1 = F2. 3. По отклонению с отрицательной обратной связью
САР, работающие по отклонению, являются системами с обратной связью. Под обратной связью понимают подачу сигнала с выхода САР на ее вход. При регулировании по отклонению с отрицательной обратной связью определяется рассогласование ε(t)= yЗ(t) – yФ(t) и осуществляется регулирующее воздействие на объект регулирования, приводящее к уменьшению рассогласования. Регулирующее воздействие формируется независимо от причин вызвавших это отклонение. Вызвано ли оно возмущающим или задающим воздействием в любом случае САР отреагирует на возникшее отклонение, стремясь уменьшить или полностью ликвидировать это отклонение.
Недостатки: 1. Допускаются отклонения – чтобы ликвидировать рассогласование надо его допустить. 2. Системы с обратной связью склонны к колебаниям. Пример 2. Регулирование уровня жидкости в емкости
Рис. 1.5. Регулирование уровня жидкости в емкости по отклонению: АР – автоматический регулятор, Д – датчик уровня; С – устройство сравнения (сумматор); З – задвижка, Н – насос Регулятор сравнивает измеренное значение уровня LФ с заданным LЗ и открывает задвижку, чтобы скомпенсировать рассогласование ε. 4. Комбинированные В комбинированных САР регулирующее воздействие осуществляется одновременно по информации о трех величинах: задающему воздействию yЗ(t), не учитываются действительное значение регулируемого параметра уФ(t) и возмущающего воздействия f(t). Подобные САР имеют более высокое качество регулирования, т.к. информация о значении возмущающего воздействия f позволяет начинать компенсацию внешнего воздействия раньше, чем возникнет достаточно большое отклонение. По цели регулирования: 1. Системы автоматической стабилизации -задающее воздействие постоянно во времени: уЗ = const. 2. Системы программного регулирования -задающее воздействие изменяется по заранее заданному закону (программе): уЗ = f(t). Например, система перемещения режущего инструмента в станках с программным управлением. 3. Следящие системы -задающее воздействие изменяется по заранее неизвестному закону и для системы является случайной величиной. Например, система управления антенной радиолокатора в режиме сопровождения цели. Луч, излучаемый антенной, должен быть все время направлен на цель независимо от совершаемых ею маневров. Поэтому задающее воздействие - угловые координаты цели - оказывается случайной для системы величиной.   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|