|
|
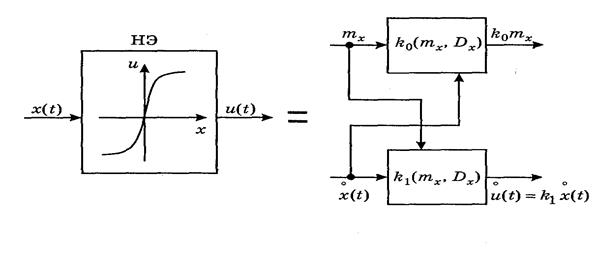
Статистическая линеаризация нелинейных элементов. ⇐ ПредыдущаяСтр 2 из 2 Линеаризация нелинейных элементов. При статистической линеаризации входные и выходные сигналы нелинейного элемента как стационарные случайные процессы рассматриваются в виде сумм соответствующих математических ожиданий и центрированных составляющих, причем средние квадраты последних равны дисперсиям. Нелинейный элемент в целях упрощения расчета заменяется двумя квазилинейными элементами (рисунок 8.1).
Рисунок 8.1 – Замена нелинейного элемента двумя квазилинейными элементами
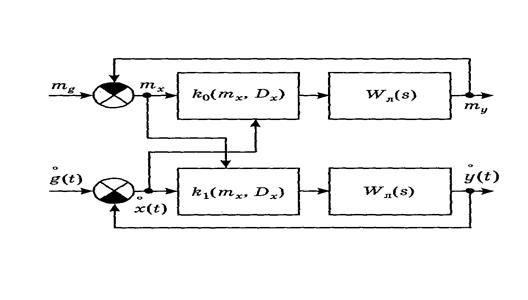
Элементы этой эквивалентной схемы называются квазилинейными, так как их коэффициенты статистической линеаризации зависят от статистических характеристик тх и Dх входного сигнала нелинейного элемента. Для всех типовых нелинейностей эти функции рассчитаны для стационарного процесса с нормальным законом распределения и приводятся в справочной литературе. Обычно даются два варианта этих функций, рассчитанных по различным методикам: 1. Исходя из равенства математических ожиданий выходных сигналов реального нелинейного элемента и его эквивалентной модели, а также из равенства соответствующих дисперсий. 2. Исходя из минимума среднего квадрата разности между выходными величинами реального нелинейного элемента и его эквивалентной модели. Расчет статистически линеаризованной нелинейной системы. Предполагается замена нелинейного элемента его эквивалентной моделью, в результате чего известная структурная схема одноконтурной САР превращается в две взаимосвязанные и сходные по виду квазилинейные структурные схемы. Первая из них отражает преобразование математических ожиданий, а вторая - центрированных составляющих (рисунок 8.2).
Рисунок 8.2 – Превращение структурной схемы одноконтурной САУ в две квазилинейные структурные схемы
Для каждой из этих схем записывают по одному уравнению и решают их совместно относительно математического ожидания тх и дисперсии Dx. Для первой схемы можно записать уравнение по теореме о предельном значении функции, а для второй - уравнение для дисперсии, как и для линейных САР. Контрольные вопросы: 1. Что называется случайным событием? 2. Что называется случайной величиной? 3. Какими статистическими характеристиками характеризуются случайные величины? 4. Что называется случайным процессом? 5. Какой случайный процесс называется стационарным случайным процессом? 6. Какой случайный процесс называется эргодическим случайным процессом? 7. что называется спектральной плотностью? 8. Каким образом выполняется статистическая линеаризация нелинейной системы?
Тема 9. Задачи оптимального управления Цель лекции: изучить понятие экстремума функций, методы решения задач оптимального управления. План лекции: 1. Особенности и общая характеристика оптимальных систем. 2. Постановка задачи оптимального автоматического управления.
1. Оптимальной называется наилучшая в некотором технико-экономическом смысле система. Основной ее особенностью является наличие двух целей управления, которые эти системы решают автоматически. Основная цель управления - поддержание управляемой величины на заданном значении и устранение возникающих отклонений этой величины. Цель оптимизации - обеспечение наилучшего качества управления, определяемое по достижению экстремума некоторого технико-экономического показателя, называемого критерием оптимальности (КО). Оптимальные системы разделяют в зависимости от вида КО на два класса: оптимальные в статике системы и оптимальные в динамике системы. У оптимальных в статике систем КО является функцией параметров или управляющих воздействий. Этот критерий имеет экстремум в статическом режиме работы системы, причем статическая характеристика, выражающая зависимость КО от управляющих воздействий оптимизации, может непредвиденным образом смещаться. Оптимальная система должна этот экстремум находить и поддерживать. Такие системы применимы, если возмущения, смещающие указанную характеристику, изменяются сравнительно медленно по сравнению с длительностью переходных процессов в системе. Тогда система будет успевать отслеживать экстремум практически в статическом режиме. Такие условия обычно выполняются на верхней ступени иерархии. Оптимальные в динамике системы отличаются тем, что их критерии оптимальности представляет собой функционал т функцию от функций времени. Это значит, что, задав функции времени, от которых данный функционал зависит, получим числовое значение функционала. Эти системы могут применяться при сравнительно быстро меняющихся внешних воздействиях не выходящих, однако, за допустимые пределы. Поэтому они 'используются на нижних уровнях управления. Основная цель управления для оптимальных в динамике систем обычно формулируется как задача перевода изображающей точки из некоторого начального состояния х(О) в некоторое конечное х(Т) состояние. Начальное состояние принято называть левым концом оптимальной траектории, а конечное - правым. Вместе взятые эти данные и образуют краевые условия. Задачи управления могут отличаться видом краевых условий. Ограничениями называются дополнительные условия, которым должны удовлетворять управляющие воздействия и управляемые величины. Виды ограничений: - безусловные (естественные) ограничения - выполняются в силу физических законов для процессов в объекте управления, показывают, что некоторые величины и их функции не могут выйти за границы, определяемые равенствами или неравенствами; - условные (искусственные) ограничения - выражают такие требования к величинам или функциям от них, согласно которым они не должны превосходить границ, определенных равенствами или неравенствами по условиям долговечной и безопасной эксплуатации объектов. Ограничения, независимо от их вида, выражаемые равенствами, называют классическими, а неравенствами – неклассическими. 2. При заданных ограничениях на управляющие воздействия, управляемые величины, а также заданных уравнении объекта управления, критерии оптимальности и краевых условиях необходимо определить оптимальное управление и оптимальную траекторию или оптимальный алгоритм управления, обеспечивающие экстремум заданного критерия оптимальности. Решение первой задачи приводит к разомкнутой САУ, решение второй - к замкнутой САУ. Для решения задач оптимального управления применяются следующие методы оптимизации: Эйлера-Лагранжа, динамического программирования Р. Бельмана, принцип максимума Л.С. Понтягина. В задаче на безусловный экстремум функционала отсутствуют всякие ограничения, это является недостатком, т.к. отсутствие ограничений обычно лишает задачу практического смысла. В задаче на условный экстремум (метод Эйлера-Лагранжа) производится формирование нового функционала, который содержит неизвестные функции, называемые множителями Лагранжа. Благодаря этому эта задача сводится к задаче на безусловный экстремум функционала. При этом уравнения Эйлера должны быть составлены как для искомых экстремалей, так и для множителей Лагранжа. В изопериметрической задаче наряду с ограничениями, принятыми для задачи на условный экстремум, имеется определенный интервал по времени. В основу метода динамического программирования положен принцип оптимальности. Согласно ему любой конечный отрезок оптимальной траектории (от произвольной промежуточной точки до одной и той же конечной точки процесс а) является сам по себе оптимальной траекторией для своих краевых условий. Принцип максимума - метод расчета оптимальных процессов и систем, который выражает необходимое условие оптимальности. Контрольные вопросы: 1. Какая система называется оптимальной? 2. Что является основной целью управления? 3. Что является целью оптимизации? 4. Какие Вы знаете виды оптимальных систем? 5. Что называется ограничениями? 6. Какими бывают ограничения? 7. Способы постановки и решения задач оптимального автоматического управления.
Тема 10. Современные тенденции развития систем управления Цель лекции: изучить особенности развития современных САУ. План лекции: 1. Основные проблемы современной теории автоматического управления. 2. Современные САУ.
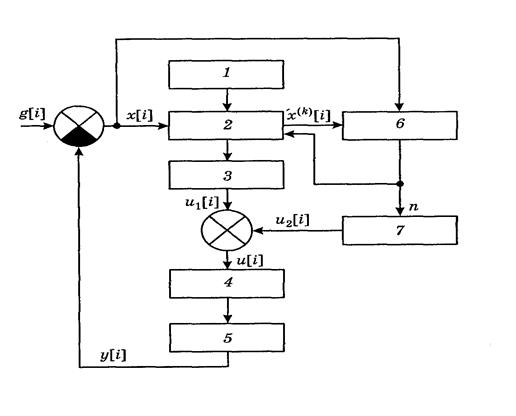
1. В классической теории автоматического управления (ТАУ) задачи оптимизации и адаптации ставились в основном применительно к управлению «в малом». Это означает, что оптимальная программа изменения режимов технологического процесса, выраженная в задающих воздействиях регуляторов, считалась известной, определенной на стадии проектирования. Задача управления заключалась в выполнении этой программы, стабилизации программного движения. При этом допускались лишь малые отклонения от заданного движения, и переходные процессы «в малом» оптимизировались по тем или иным критериям. В конце 50-х - начале 60-х гг. ХХ столетия появились работы Л.С. Понтрягина (принцип максимума), Р. Беллмана (динамическое программирование), Р. Калмана (оптимальная фильтрация, управляемость и наблюдаемость), которые заложили основы современной теории автоматического управления, общепринятого определения понятия которой пока не существует. Некоторым характерным признаком современной теории автоматического управления считают также описание процессов в пространстве состояний, развитие теории адаптивного управления, т. е. управления при неполной априорной информации. Наиболее точно современную теорию автоматического управления можно отделить от классической ТАУ, учитывая требования научно-технического прогресса, современной и перспективной автоматизации. Важнейшим из таких требований является оптимальное использование всех располагаемых ресурсов (энергетических, информационных, вычислительных) для достижения главной обобщенной конечной цели при соблюдении ограничений. Например, запуск или выход на новый режим работы машины, агрегата, станции с минимальными затратами, достижение заданной в 3-мерном пространстве навигационной точки в заданное время с заданным курсом при минимальном расходе топлива. В связи с этим оптимизация «в большом», осуществляемая в реальном времени в процессе управления, становится центральной проблемой современной теории автоматического управления. Эта фундаментальная проблема порождает ряд крупных проблем, задач и методов их решения. Прежде всего, указанная оптимизация требует полного использования имеющейся априорной информации в виде математической модели управляемого процесса или объекта. Использование таких моделей не только на стадии проектирования, но и в процессе функционирования систем, является одной из характерных черт современной теории автоматического управления. Оптимальное управление возможно лишь при оптимальной обработке информации. Поэтому теория оптимального (и субоптимального) оценивания (фильтрации) динамических процессов является составной частью современной теории автоматического управления. Особо важной является параметрическая идентификация (оценивание параметров и характеристик по экспериментальным данным), выполняемая в реальном масштабе времени в эксплуатационных режимах ОУ. Центральной частью современной теории автоматического управления является, собственно, теория оптимального или субоптимального управления «в большом» детерминированными или стохастическими нелинейными процессами. Подлинная оптимизация автоматического управления в условиях неполной априорной информации возможна только в процесс е функционирования системы в текущей обстановке и возникшей ситуации. Следовательно, современная теория автоматического управления должна рассматривать адаптивное оптимальное (субоптимальное) управление «в большом». Кроме того, современная теория автоматического управления должна рассматривать методы резервирования и структурного обеспечения надежности (особенно принципы автоматической реконфигурации системы при отказах). 2. Адаптивная оптимальная САУ на базе самоорганизующегося оптимального регулятора с экстраполяцией. Функциональная схема такой САУ содержит следующие элементы (рисунок 10.1): - блок памяти (1); - блок оценивания (2); - исполнительные блоки (3, 7); - экстраполятор нулевого порядка (ЦАП) (4); - обобщенный объект регулирования (5); - блок автоматического поиска порядка математической модели (ММ) объекта (6).
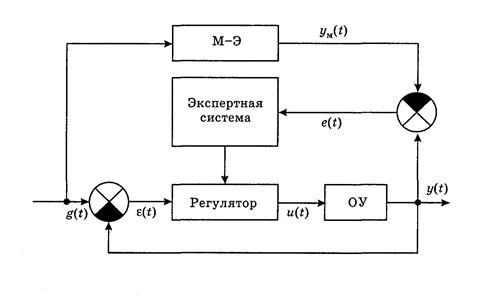
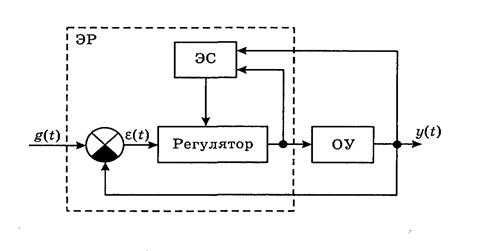
Рисунок 10.1 - Функциональная схема адаптивной оптимальной САУ на базе самоорганизующегося оптимального регулятора с экстраполяцией Попринципу функционирования эта САУ относится к системам с дискретным временем циклического типа. Входной величиной самоорганизующегося оптимального регулятора с экстраполяцией служит сигнал рассогласования x(t) между задающим воздействием g(t) и выходной величиной y(t) объекта. Этот сигнал измеряется на каждом шаге. Данная САУ впервые позволяет реализовать адаптивное управление при неизвестной априори структуре ОР благодаря высокому уровню структурной и параметрической адаптации, которая обеспечивается, прежде всего, за счет применения наблюдателей в виде фильтра Калмана-Бьюси, устройств экстраполяции и поиска порядка математической модели. Синергетические оптимальные САУ. Название «синергетика» произошло от греческого «синергос» «вместе действующий» и обозначает общенаучное направление, изучающее совместные действия нелинейных динамических систем различной природы. Базовые положения синергетической теории заключаются в следующем: - В синергетических системах в процессе самоорганизации происходит уменьшение числа степеней свободы, т. е. управляемая декомпозиция фазового пространства, путем выделения лишь нескольких координат, к которым подстраиваются остальные. Именно эти так называемые макропеременные и определяют основные особенности динамики системы, открывая возможность построения упрощенных агрегированных моделей. - Следствием этого процесса самоорганизации является образование в фазовом пространстве так называемых аттракторов инвариантных многообразий, к которым притягиваются траектории системы. - Каждый аттрактор имеет свою область притяжения в фазовом пространстве, отделенную границей от других областей. При чем направленная самоорганизация обеспечивает выход на желаемый аттрактор за счет соответствующего выбора алгоритма изменения управляющих воздействий как функций координат системы. Аналитическое конструирование агрегированных регуляторов состоит из следующих этапов: 1). Постановка задачи. Объект управления описывается системой нелинейных дифференциальных уравнений. Требуется найти закон управления,который обеспечивает перевод изображающей точки из произвольного начального состояния сначала в окрестность инвариантного многообразия, а затем в дальнейшее устойчивое асимптотическое движение вдоль этого многообразия в желаемое состояние, в частности, в начало координат. 2). Выбор агрегированных макропеременных, т.е. функций. Эти функции могут строиться различными способами, и их поиск является главной задачей проектирования. Этот поиск пока в большей мере носит эвристический характер. 3). Нахождение закона оптимального управления производится без решения оптимизационной задачи. Изменение макроперемецной \j1(t) считается оптимальным, если минимизируется так называемый сопровождающий оптимизирующий функционал, имеющий, в частности, вид улучшенной квадратичной оценки. Минимум такому функционалу доставляет асимптотически стремящаяся к нулю экспонента, являющаяся общим решением так называемого функционального уравнения. Затем определяют производную от макропеременной по времени, как от сложной функции в силу уравнений объекта. Эту производную и саму макропеременную подставляют в функциональное уравнение и находят отсюда искомый закон оптимального управления. Сопровождающий оптимизирующий функционал с учетоми позволяет также найти критерий качества, по которому оптимизируется синтезируемая система. Он содержит высокие степени координат, что существенно улучшает важные показатели качества в отношении быстродействия, перерегулирования, демпфирования колебаний и др. Особенно эти достоинства проявляются в областях значительных отклонений изображающей точки от заданного состояния. Интеллектуальные системы автоматического управления. Создание систем, ориентируемых для работы в условиях неполноты или нечеткости исходной информации, неопределенности внешних возмущений и среды функционирования, требует привлечения нетрадиционных подходов к управлению с использованием методов и технологий искусственного интеллекта. Такие системы, названные интеллектуальными системами управления, образуют совершенно новый класс. Это понятие возникло в начале 80-х г.г. ХХ в. В качестве базовых выделяются 4 интеллектуальные технологии: - технология экспертных систем, ориентированная на обработку знаний с явной формой представления в виде продукционных правил; - технология нечеткой логики, ориентированная на обработку логико-лингвистических моделей представления знаний с помощью продукционных правил и размытых множеств; - технология нейросетевых структур с неявной формой представления знаний, скрытых в архитектуре сети, параметрах нейронов и связей; - технология ассоциативной памяти, ориентированная на обработку знаний с неявной формой представления в виде гиперповерхности в многомерном пространстве признаков. Отсюда, в частности, видно, что основной отличительной чертой интеллектуальных систем автоматического управления является возможность системной обработки знаний, под которыми понимается проверенный практикой результат познания деятельности, верное ее отражение в мышлении человека. Знания позволяют отнести сложившуюся ситуацию к некоторому классу, для которого требуемое управление считается известным согласно теории ситуационного управления Д.А. Поспелова и его научной школы. Одна из передовых тенденций в области обработки знаний состоит в интеграции различных интеллектуальных технологий для сочетания их преимуществ. Организация интеллектуальных систем автоматического управления производится по следующим принципам: - информационного взаимодействия интеллектуальной системы автоматического управления с реальным внешним миром при использовании информационных каналов связи; - наличие прогнозов изменения внешнего мира и собственного поведения системы; - многоуровневый характер иерархической структуры в соответствии с правилом: повышение интеллектуальности и снижение требований к точности по мере повышения ранга иерархии; - сохранение функционирования при разрыве связей от высших уровней иерархии; - повышение интеллектуальности и совершенствование собственного поведения. Экспертные информационные системы автоматического управления. Эти системы могут строиться по различным схемам, известным для адаптивных САУ. Наиболее эффективной в этом случае является схема (рисунок 10.2), использующая принцип параметрической ООС,второй метод Ляпунова и эталонную модель. В качестве регулятора в основном контуре обеих САУ обычно используется линейный ПИД-регулятор.
Рисунок 10.2 – Наиболее эффективная схема экспертной информационной САУ
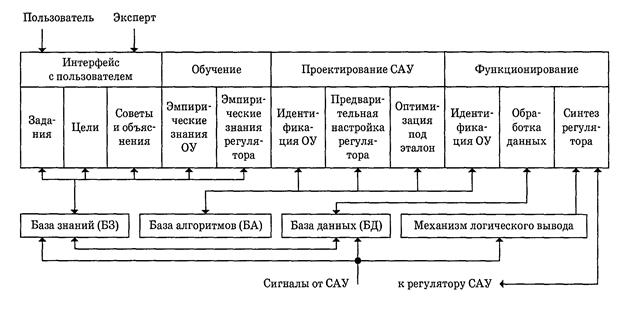
В общем случае под экспертной системой понимается интеллектуальная программа, способная делать логические выводы на основании знаний в конкретной предметной области и обеспечивающая решение определенных задач. Работа экспертного регулятора (рисунок 10.3) условно может быть разбита на 3 этапа в соответствии с архитектурой, показанной на рисунке 10.4. На первом этапе решаются задачи проектирования САУ: - выбор структуры модели ОУ; - определение параметров ОУ нерекуррентным методом идентификации; -выбор закона управления; - предварительная настройка параметров закона управления; - окончательный синтез параметров закона управления по заданному пользователем критерию качества, в результате чего в пространстве качества определяется «рабочая точка».
Рисунок 10.3 – Схема работы экспертного регулятора
Рисунок 10.4 – Архитектура работы экспертного регулятора
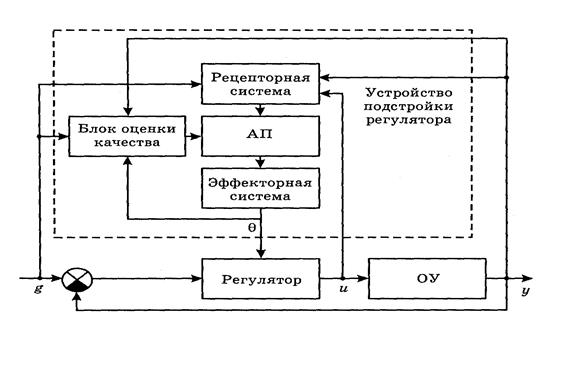
На втором этапе решается задача обучения при изменении параметров в окрестности «рабочей точки». Здесь формируются текущие эмпирические знания о динамических свойствах САУ в виде качественной зависимости между изменением параметров модели объекта и регулятора, с одной стороны, и параметрами критерия качества, с другой. На третьем этапе происходит непрерывное слежение за протекающими процессами, и решаются следующие задачи активной самодиагностики: - обработка измерений с датчиков; - оценка измерений параметров САУ как аналитическими методами, так и на основе эмпирических знаний об ОУ; - коррекция параметров регулятора и ее оценка; - изменение закона управления (в случае необходимости). Основной проблемой при создании любой экспертной системы является разработка базы знаний в достаточно узкой и конкретной предметной области, которая может быть решена в 2 этапа: 1) формализация и структурирование экспертных знаний о предметной области (ТАУ); 2) формализация представлений этих знаний с помощью моделей искусственного интеллекта. База алгоритмов содержит правила идентификации, позволяющие осуществить получение или уточнение по экспериментальным данным математической модели системы, выраженной посредством того или иного математического аппарата. Нейросетевые системы и регуляторы. Высокое быстродействие за счет распараллеливания входной информации в сочетании с обучаемостью нейронных сетей подобно своим биологическим прототипам делает эту технологию весьма привлекательной для создания самообучающихся оптимальных автоматических устройств управления с идентификацией объекта управления. Наиболее распространенной структурой, которая вобрала в себя все основные свойства, присущие нейронным сетям, является многослойная нейронная сеть прямого распространения, которая характеризуется отсутствием внутренней динамики (т.е. безынерционностью) и может реализовать любое однозначное нелинейное преобразование входного вектора в желаемый выходной, точность которого определяется числом нейронов скрытых в слоях. Настройка многослойной нейронной сети прямого распространения называется процедурой обучения. Высокие требования по точности определяют необходимость обучения сети на большом количестве примеров. Группа примеров, по которой производится обучение, называется страницей примеров. Системы автоматического управления с ассоциативной памятью. Ассоциация - явление, когда одно представление вызывает по сходству, смежности или противоположности другое. Ассоциативная память - это устройство хранения информации, которое позволяет восстанавливать и выдавать информацию на основе ассоциации, т.е. по заданному сочетанию признаков, свойственных искомой информации. Эта информация имеет приближенный характер. Ассоциативная память может быть пирамидальной, матричной и самоорганизующейся. Пирамидальная (иерархическая) ассоциативная память проводит классификацию входного вектора по некоторому признаку, относя его к одной из классификационных групп. Затем в этой группе вектор классифицируется по другому признаку, и этот процесс повторяется до полного совпадения всех признаков с одной из классификационных групп. Матричная ассоциативная память - это частный случай пирамидальной ассоциативной памяти, когда имеется только один уровень классификации. Память на самоорганизующихся структурах реализует хранение информации в виде аттракторов, например, в осцилляторных нейросетях. В зависимости от входного вектора система выходит на один из них. Ассоциативная память этого вида динамическая, т.е. информация в ней сохраняется в течение некоторого времени. Обучение памяти - это процесс формирования содержимого памяти в зависимости от входной информации. Управление этим процессом состоит в выработке сигнала разрешения или запрещения записи в память. Содержимое памяти может меняться всякий раз при поступлении на ее вход любого вектора или при поступлении на вход только тех векторов, на которые ранее память никогда не обучалась. В системах управления ассоциативная память обучается на входной вектор, состоящий из двух частей. Первая часть содержит информацию с выходов регулятора и датчиков обратных связей, а вторая - параметры регулятора или значения управляющих воздействий, обеспечивающих требуемые критерии качества. В режиме управления по первой части вектора восстанавливается вторая. Таким образом, осуществляются оперативная идентификация и адаптация. Интеллектуальные системы с ассоциативной памятью можно условно разделить на системы первого и второго рода в зависимости от того, работают ли они в условиях предсказуемой или непредсказуемой неопределенности соответственно. Предсказуемая неопределенность имеет место в том случае, когда известна априорная информация о законе изменения управляемых координат в функции времени. Функциональная схема САУ с ассоциативной памятью первого рода показана на рисунок 10.5.
Рисунок 10.5 – САУ с ассоциативной памятью первого рода
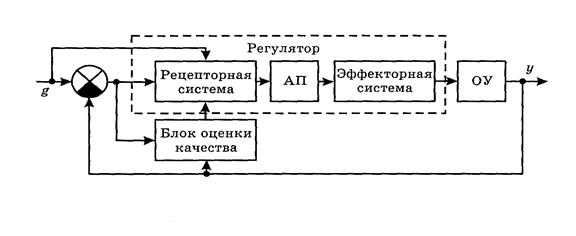
В САУ с ассоциативной памятью второго рода (рисунок 10.6) рецепторная система, ассоциативная память и эффекторная система входят непосредственно в основной контур управления в качестве регулятора.
Рисунок 10.6 - САУ с ассоциативной памятью второго рода В такой системе формирование знаний в ассоциативной памяти на этапе обучения осуществляется оператором. Ассоциативная память записывает набор входных векторов сигналов от датчиков и соответствующих им управляющих воздействий, выполненных оператором. После обучения ассоциативной памяти на всевозможные ситуации она заменяет человека. По входному вектору, содержащему информацию о состоянии ОУ и входном воздействии, ассоциативная память формирует управляющее воздействие на ОУ, обеспечивая адаптивную подстройку под изменение, как структуры, так и параметров ОУ. Задача косвенного управления требует обучения на наиболее полный набор возможных состояний ОУ. При выполнении критерия качества соответствующий блок, классифицируя состояние объекта, дает разрешение на запись информации в ассоциативную память при обучении. Преимущества САУ с ассоциативной памятью состоят в следующем: - ассоциативная память аккумулирует не все возможные решения по управлению ОУ, а только основные, что сокращает необходимый объем памяти; - ассоциативная память позволяет осуществить доступ к данным с высокой скоростью; - САУ с ассоциативной памятью достаточно проводить классификацию состояния системы на качественном уровне, чтобы сформировать управления, соответствующие текущему состоянию системы и заданному критерию качества управления в реальном времени, даже для ОУ с быстро меняющимися параметрами и структурой. На базе всех вышеперечисленных систем производится разработка роботизированных систем и гибких производственных систем. Контрольные вопросы: 1. Чем отличается классическая теория автоматического управления от современной теории автоматического управления? 2. Какие особенности имеет адаптивная оптимальная САУ на базе самоорганизующегося оптимального регулятора с экстраполяцией? 3. Какие особенности имеют синергетические оптимальные САУ? 4. Какие особенности имеют интеллектуальные системы автоматического управления? 5. Какие особенности имеют экспертные информационные системы автоматического управления? 6. Какие особенности имеют нейросетевые системы и регуляторы? 7. Какие особенности имеют системы автоматического управления с ассоциативной памятью?
Разработал ст. преподаватель С. Чумаченко
  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|