
|
|
Определение частотных характеристик элемента.Стр 1 из 2Следующая ⇒ Амплитудно-фазовую частотную характеристику (АФЧХ) элемента находим из выражения W(jw) = W(p) ½ p = jw путем подстановки в него передаточной функции (3.115) при p = jw:
Вид АФЧХ на комплексной плоскости приведен на рисунке 3.9 а. Из выражения (3.118) находим действительную и мнимую частотные характеристики:
Подставляя значения этих характеристик в выражения: A(w) = ç W(jw) ç =
Графики амплитудной и фазовой частотных характеристик приведены на рисунке 3.9 б,в.
Рисунок 3.9 - Частотные характеристики элемента а – амплитудно – фазовая, б – амплитудная, в – фазовая.
Контрольные вопросы: 1. Какие режимы движения САУ Вы знаете? 2. Как описываются элементы и системы в статическом режиме? В динамическом режиме? 3. Какие Вы знаете типовые воздействия? 4. Какие условия называют начальными? 5. Какие начальные условия называют нулевыми начальными условиями, а какие ненулевыми начальными условиями? 6. Дайте определение передаточной функции и частотной передаточной функции. 7. Запишите передаточную функцию в показательной, алгебраической и тригонометрической формах. 8. Какие Вы знаете частотные характеристики. Как они строятся? 9. Какой масштаб называют логарифмическим, а какой полулогарифмическим? 10. Какое звено называется элементарным. 11. Запишите формулы для передаточных функций типовых динамических звеньев. 12. Рассмотрите временные и частотные характеристики типовых динамических звеньев. 13. Какая схема САУ называется структурной? 14. Назовите три главных правила преобразования структурных схем (без перекрестных связей между звеньями). 15. Запишите формулы, по которым можно определить эквивалентную передаточную функцию: последовательного, параллельного и параллельно-встречного соединения звеньев. 16. Как определяются частотные характеристики: последовательного, параллельного и параллельно-встречного соединения звеньев. 17. Назовите вспомогательные правила преобразования структурных схем (с перекрестными связями между звеньями).
Тема 4. Методы исследования линейных САУ Цель лекции: изучить модель непрерывной и дискретной САУ. План лекции: 1. Классификация САУ. 2. Описание САУ обыкновенными дифференциальными уравнениями.
1. В зависимости от вида сигналов, действующих в системах, САУ разделяют на: непрерывные и дискретные. Непрерывная САУ – система, в которой действуют непрерывные (аналоговые), определенные в каждый момент времени сигналы. Дискретная САУ - система, в которой действует хотя бы один дискретный, определенный только в некоторые моменты времени сигнал. К дискретным АСУ относятся, например, САУ, имеющие в своем составе цифровые вычислительные устройства: микропроцессоры, контроллеры, электронные вычислительные машины. По степени зависимости управляемой величины в установившемся режиме от величины возмущающего воздействияАСУ делят на: статические и астатические. Статическая САУ – система, в которой имеется зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия. Астатическая САУ – система, в которой отсутствует зависимость управляемой величины в установившемся режиме от величины возмущающего воздействия. По виду дифференциальных уравнений, описывающих элементы АСУ они делятся на: линейные и нелинейные. Линейные САУ – система, все элементы которых описываются линейными дифференциальными и/или алгебраическими уравнениями. Нелинейные САУ – система, хотя бы один элемент которой описывается нелинейными дифференциальными и/или алгебраическими уравнениями. В зависимости от принадлежности источника энергии, при помощи которого создается управляющее воздействие,различают АСУ: прямого действия и непрямого действия. САУ прямого действия – система, в которой управляющее воздействие создается при помощи энергии объекта управления. К ним относятся простейшие системы стабилизации (уровня, расхода, давления и т. п.), в которых воспринимающий элемент через рычажную систему непосредственно действует на исполнительный орган (заслонку, клапан и т. д.). САУ непрямого действия – система, в которой управляющее воздействие создается за счет энергии дополнительного источника. Например, в АСУ возбуждением синхронного генератора (рисунок 4.1) напряжение управления uу (управляющее воздействие) формируется регулятором напряжения РН, получающим энергию от дополнительного источника питания.
Рисунок 4.1 - Структура автоматической системы управления возбуждением синхронного генератора
Назначение системы – поддержание постоянным напряжения на выводах статорной обмотки генератора путем изменения тока в его обмотке возбуждения. Управляемой величиной x(t) в системе является напряжение uГ генератора. Сигнал ux (контрольное воздействие xк(t)), пропорциональный напряжению uГ, вырабатывается датчиком напряжения ДН и передается в устройство сравнения УС, где он сравнивается с заданием uГЗ (задающим воздействием xз(t)). В зависимости от знака и величины сигнала рассогласования uр регулятор напряжения РН формирует сигнал управления uу (управляющее воздействие y(t)) на увеличение или уменьшение тока возбуждения if на выходе возбудителя В. Этот ток возбуждения и определяет напряжение uГ генератора. Основным возмущающим воздействием zо(t) является ток нагрузки iГ генератора в цепи связи с электрической системой ЭС. В качестве объекта управления ОУ в данной системе можно рассматривать синхронный генератор СГ с возбудителем В. К управляющему устройству УУ относятся устройство сравнения УС и регулятор напряжения РН. 2. Обыкновенное дифференциальное уравнение является наиболее общей и полной формой описания передаточных свойств элементов САУ. Для элемента имеющего один входной сигнал x(t) и один выходной y(t) обыкновенное дифференциальное уравнение в общем случае имеет вид: Ф[ y(t), y¢(t),… y(n)(t); x(t),…x(m)(t), t ] = 0, (4.1) где t – независимая переменная (обычно время). Для реальных систем m £ n. Это уравнение динамики (движения) элемента. Движения в широком смысле слова, когда под движением понимается любое изменение сигналов. Дифференциальное уравнение (4.1) может быть: линейное и нелинейное. Линейное дифференциальное уравнение – уравнение, в котором функция Ф линейна по отношению ко всем ее аргументам, т. е. к y(t), y¢(t),… y(n)(t); x(t),…x(m)(t), t. Так, например, передаточные свойства четырехполюсника с линейными элементами (рисунок 4.2) описываются линейным дифференциальным уравнением вида:
Рисунок 4.2 - Схема четырехполюсника с линейными элементами Нелинейное дифференциальное уравнение – уравнение, в котором функция Ф содержит произведения, частные, степени и т. д. переменных y(t), x(t) и их производных. Так, например, передаточные свойства четырехполюсника с нелинейным резистором (рисунок 4.3) описываются нелинейным дифференциальным уравнением вида:
В функцию Ф (дифференциальное уравнение) входят также величины, называемые параметрами. Они связывают между собой аргументы (y(t), y¢(t),… y(n)(t); x(t),…x(m)(t), t) и характеризуют свойства элемента с количественной стороны. Например, параметрами являются масса тела, активное сопротивление, индуктивность и емкость проводника и т. д. Большинство реальных элементов описываются нелинейными дифференциальными уравнениями, что значительно усложняет последующий анализ АСУ. Поэтому стремятся перейти от нелинейных к линейным уравнениям вида:
Для всех реальных элементов выполняется условие m £ n. Коэффициенты a0, a1…an и b0, b1…bm в уравнении (4.4) называются параметрами. Иногда параметры изменяются во времени, тогда элемент называют нестационарным или с переменными параметрами. Таковым, например, является четырехполюсник, схема которого приведена на рисунке 4.3. Однако в дальнейших рассуждениях будем рассматривать только элементы с постоянными параметрами. Если при составлении линейного дифференциального уравнения осуществлялась линеаризация статической характеристики элемента, то оно справедливо лишь для окрестности точки линеаризации и может записываться в отклонениях переменных x и y от значений x0 и y0 : Dy= y- y0 ; (4.5) Dx= x- x0. (4.6) Тогда с учетом этих обозначений выражение принимает вид: Dy= kDx, (4.7) где k = y¢(x0) – передаточный коэффициент элемента, характеризующий его передаточные свойства в статическом режиме. Однако, с целью упрощения записи, отклонения переменных в линеаризованном уравнении будем обозначать теми же символами, что и в исходном нелинейном уравнении, но без символа D. Важнейшим практическим достоинством линейного уравнения (4.4) является возможность применения принципа наложения, согласно которому изменение выходной величины y(t), возникающее при действии на элемент нескольких входных сигналов xi(t), равно сумме изменений выходных величин yi(t), вызываемых каждым сигналом xi(t) в отдельности (рисунок 4.4).
Рисунок 4.4 - Иллюстрация принципа наложения
Контрольные вопросы: 1. По каким признакам классифицируются системы автоматического управления? 2. Какая САУ называется непрерывной? 3. Какая САУ называется дискретной? 4. Как составляются обыкновенные дифференциальные уравнения?
Тема 5. Методы исследования нелинейных САУ Цель лекции: уяснить особенности, отличающие нелинейные системы от линейных; изучить основные виды нелинейностей; изучить некоторые частные способы решения нелинейных дифференциальных уравнений; изучить основные методы определения устойчивости нелинейных систем. План лекции: 1. Понятие нелинейных САУ. Классификация нелинейностей. 2. Устойчивость нелинейных систем. Методы исследования нелинейных систем. 1. Нелинейными называются системы автоматического управления, динамика движения которых описывается нелинейными дифференциальными уравнениями. Если хотя бы одно звено САУ имеет нелинейную статическую характеристику, то вся САУ является нелинейной. Большинство нелинейных САУ можно представить в виде последовательного соединения двух частей системы: линейной и нелинейной как показано на рисунке 5.1. Wл(s) - передаточная функция линейных элементов системы; Wнл(s) –передаточная функция нелинейных элементов системы; Wf(s) – предаточная функция линейного объекта управления по возмущению.
Почти все реальные элементы САУ нелинейны. Нелинейности можно разделить на две группы: гладкие несущественные и существенные. К гладким несущественным нелинейностям относятся такие нелинейности, на которых при малом диапазоне изменения аргумента можно выбрать участки, близкие к линейным, и заменить их линейными участками. Такие САУ на выбранном диапазоне изменения аргумента можно считать линейными, и проводить их анализ как анализ линейных САУ. Существенные нелинейности обычно являются: разрывными или неоднозначными функциями или функциями, имеющими изломы. Преобразование любого входного воздействия для такой характеристики всегда нелинейно. Существенные нелинейности весьма разнообразны. Основные виды таких нелинейностей приведены в таблице 5.1. Указанные в таблице примеры звеньев ни в коей мере не претендуют на полноту. Такие нелинейные характеристики могут иметь элементы и другой физической природы. Нелинейные САУ характеризуются более сложными и разнообразными динамическими процессами по сравнению с линейными САУ. Характер движения нелинейных САУ зависит от начальных условий. В нелинейных САУ возможен без каких-либо внешних возмущений новый по сравнению с линейными САУ вид установившегося движения – автоколебания, то есть устойчивые колебания с определенной амплитудой и частотой, зависящих от конструктивных особенностей САУ. Если на вход нелинейной САУ подать периодическое возмущение, то в ней могут наблюдаться особые случаи резонанса, который может происходить на частоте, равной доле частоты входного воздействия. Возможен и ряд других особенностей движения нелинейных САУ. Таблица 5.1 – Основные виды нелинейностей второй группы.
2. Вопрос об устойчивости нелинейных САУ нельзя решить так же просто как в линейных САУ. Нелинейная САУ может быть устойчива в малом (при незначительных начальных возмущениях) и неустойчива в большом (если начальные условия превышают некоторые определенные граничные значения). Нелинейная САУ может иметь область устойчивости равновесного состояния с постоянным значением регулируемой величины и быть асимптотически устойчивой. Она может иметь одну или несколько областей устойчивых автоколебаний. Нелинейная САУ неустойчива в малом и имеет устойчивые автоколебания в большом. Нелинейные САУ могут иметь области неустойчивости. Поведение нелинейных САУ описывается нелинейными дифференциальными уравнениями. Общих методов решения этих уравнений нет, и для анализа работы нелинейных САУ при разработке и проектировании используют некоторые частные способы решения нелинейных уравнений: метод фазового портрета, метод гармонической линеаризации, метод припасовывания, статистической линеаризации и т.д. Контрольные вопросы: 1. Какие системы автоматического управления называются нелинейными? 2. Какими дифференциальными уравнениями описывается движение нелинейных САУ? 3. Какие Вы знаете виды нелинейностей? 3. Назовите основные виды существенных нелинейностей и приведите примеры реальных устройств, имеющих существенно нелинейные характеристики. 4. От чего зависит характер движения нелинейных САУ? 5. Когда могут возникнуть автоколебания в нелинейной системе? 6. Как решается вопрос об устойчивости нелинейных САУ? 7. Когда нелинейная САУ устойчива в малом и неустойчива в большом? 8. Какими свойствами могут обладать нелинейные САУ? 9. Какие способы решения нелинейных дифференциальных уравнений используют при разработке и проектировании? Перечислите их.
Тема 6. Устойчивость систем автоматического управления Цель лекции: уяснить задачи анализа автоматических систем, понятие устойчивости линейных систем; изучить способы определения устойчивости САУ после снятия ограниченных во времени входных воздействий (экспериментальный способ определения устойчивости); уяснить понятия необходимого и необходимого и достаточного условия устойчивости; изучить правило определения устойчивости по расположению корней характеристического уравнения; изучить условия устойчивости САУ по алгебраическим критериям устойчивости: Рауса и Гурвица; изучить условия устойчивости САУ по критериям Михайлова, Найквиста и по виду логарифмических характеристик. План лекции: 1. Понятие устойчивости САУ. Задачи анализа САУ. 2. Методы (способы) определения устойчивости: экспериментальный и аналитические (теоретические). 3. Определение устойчивости САУ после снятия ограниченных по времени и величине входных воздействий. 4. Определение устойчивости по расположению корней характеристического уравнения. 5. Необходимые и достаточные условия устойчивости. 6. Алгебраические критерии устойчивости. 7. Частотные критерии устойчивости. 8. Область устойчивости САУ. 9. Запас устойчивости. 10. Влияние звена чистого запаздывания на устойчивость САУ. 1. САУ предназначенная для управления каким-либо процессом или агрегатом должна быть работоспособна, также должна обладать свойствами, удерживающими параметры в таких пределах, чтобы не происходило существенных нарушений технологического процесса или работы агрегата. Работоспособность системы определяется ее устойчивостью. Устойчивость – это способность системы возвращаться в исходное или близкое ему состояние после снятия ограниченных возмущающих или управляющих воздействий на систему. Неустойчивая САУ не возвращается в состояние равновесия, а непрерывно удаляется от него. Система, не обладающая устойчивостью, вообще не способна выполнять функции управления и имеет нулевую или даже отрицательную эффективность. Неустойчивая система может привести управляемый объект в аварийное состояние. Поэтому проблема устойчивости систем является одной из главных в теории автоматического управления. Рассмотрим причины неустойчивости САУ. Неустойчивость САУ возникает, как правило, из-за неправильного (положительного) или очень сильного действия главной обратной связи. В результате чего в систему в режиме гармонических колебаний непрерывно поступает (закачивается) энергия. Энергия системы увеличивается, а значит, увеличиваются и связанные с ней режимные параметры, например, регулируемая величина. Такое явление получило название резонанса. Причинами неправильного действия главной обратной связи САУ являются: - выполнение главной обратной связи САУ по ошибке положительной вместо отрицательной, что практически при любых параметрах делает систему неустойчивой. - значительная инерционность элементов замкнутого контура САУ (например, объекта управления), из-за которой в режиме колебаний системы сигнал главной обратной связи (например, управляемая величина) значительно отстает от входного сигнала (например, управляющего воздействия) и оказывается с ним в фазе. Это означает, что связь, выполненная конструктивно как отрицательная, в динамическом режиме (режиме гармонических колебаний) начинает на определенной частоте действовать как положительная. Это ведет к раскачиванию системы и нарушению ее устойчивости. Задачами анализа устойчивости АСУ обычно являются: - определение устойчивости или неустойчивости системы при заданных параметрах; - определение допустимого по условиям устойчивости диапазона изменения некоторых незаданных параметров системы; - выяснение принципиальной возможности устойчивости системы при заданной ее структуре. Свойства системы, позволяющие удерживать параметры технологических процессов или работы агрегатов в заданных пределах, характеризуют качество работы системы. Конкретные требования к поведению параметров выдвигаются практикой ведения процесса или условиями работы агрегата. Такие требования индивидуальны в каждом конкретном случае. Однако можно назвать ряд общих показателей качества работы системы. Которые позволяют почти всегда определить в ней требования к поведению параметров. Такими показателями являются: точность поддержания параметра в установившемся режиме работы системы или при стационарных случайных возмущениях, быстродействие системы, значение максимальных динамических отклонений в системе под действием возмущений. 2. В настоящее время для определения устойчивости САУ используются: экспериментальный и аналитические методы определения устойчивости. Экспериментальный метод исследования можно применять при наличии действующей системы. В этом случае устойчивость и показатели качества определяются по изменению входной величины системы при подаче на вход типовых сигналов (единичного ступенчатого воздействия, короткого импульса, гармонического сигнала, стационарного случайного воздействия). Для осуществления этого метода исследования необходима аппаратура, способная с достаточной степенью точности регистрировать изменения входных и выходных воздействий системы. Аналитические (теоретические) методы исследования основаны на анализе математической модели, описывающей работу системы. Математическая модель системы может быть представлена обыкновенными дифференциальными уравнениями, дифференциальными уравнениями в частных производных, интегральными уравнениями и т.д. Рассмотрим САУ, математическая модель, которой представлена дифференциальным уравнение n -го порядка с постоянными коэффициентами:
где
Причем всегда После ввода алгебраического оператора дифференцирования
Устойчивость и показатели качества САУ, можно оценить, анализируя изменения выходной величины во времени, полученные при решении дифференциального уравнения, если подставить в правую часть уравнения вместо x(t) различные типовые сигналы. Дифференциальное уравнение можно решить традиционными методами интегрирования обыкновенных дифференциальных уравнений. Обычно решение этого уравнения при различных входных сигналах и начальных условиях вызывает определенные трудности. Поэтому в теории автоматического управления разработаны более простые методы оценки устойчивости и некоторых показателей качества работы систем. Определить устойчивость САУ, имея математическую модель, можно: по расположению корней характеристического уравнения, с помощью алгебраических и частотных критериев устойчивости.
1) движение устойчивой системы (рисунок 6.1б); 2) движение неустойчивой системы (рисунок 6.1в);
Рисунок показывает, что устойчивость системы определяется характером ее движения после прекращения действия входного воздействия (при t>t0). 4. Движение системы в период Т характеризует дифференциальное уравнение при
где y(t) – свободная составляющая выходной величины. С математической точки зрения: - система устойчива, если свободная составляющая у(t) переходного процесса с течением времени стремится к нулю; - система неустойчива, если свободная составляющая у(t) переходного процесса с течением времени неограниченно возрастает; - система находится на границе устойчивости, если свободная составляющая у(t) переходного процесса с течением времени не стремится ни к нулю, ни к бесконечности. Решение этого уравнения с ненулевыми начальными условиями будет характеризовать устойчивость системы. Общее решение данного уравнения будет иметь вид: где λi – корни характеристического уравнения Сi – произвольные постоянные, определяемые начальными условиями системы.
5. Показанное выше свойство корней характеристического уравнения используется для установления необходимого условия устойчивости САУ. Если известны все корни характеристического уравнения λ1, …,λn, то уравнение корней характеристического уравнения может быть представлено в виде: В устойчивой системе все вещественные корни λi = - α, а все комплексные корни λi = - α Очевидно, что при раскрытии скобок в этом уравнении все коэффициенты характеристического уравнения должны быть положительны. Необходимым условием устойчивости является положительность всех коэффициентов характеристического уравнения. Таким образом, если в характеристическом уравнении хотя бы один коэффициент отрицательный или равен нулю, система неустойчива. Для уравнений первого и второго порядка условие положительности коэффициентов характеристического уравнения является необходимым и достаточным условием устойчивости, в чем легко убедиться, определив корни этих уравнений. 6. Нахождение корней характеристического уравнения при n>4 задача весьма трудная, поэтому разработан ряд достаточных принципов, позволяющих определить устойчивость САУ, не находя корни характеристического уравнения, которые называются критериями устойчивости. Критерии устойчивости делятся на: алгебраические и частотные критерии устойчивости. Алгебраическими критериями устойчивости называются такие условия устойчивости, которые позволяют определять устойчивость САУ с помощью простых арифметических действий: сложения, вычитания, умножения и деления. Алгебраические критерии устанавливают необходимые и достаточные условия отрицательности вещественных частей корней в форме ограничений, накладываемых на определенные комбинации коэффициентов характеристического уравнения системы. Частотные критерии устойчивости позволяют судить об устойчивости САУ по виду их частотных характеристик, т.е. частотные критерии определяют связь между устойчивостью системы и формой ее частотных характеристик.   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 (3.118)
(3.118)  (3.119)
(3.119) (3.120)
(3.120) и j (w) = arg W(jw) =
и j (w) = arg W(jw) =  , находим искомые выражения соответственно для амплитудной и фазовой частотных характеристик:
, находим искомые выражения соответственно для амплитудной и фазовой частотных характеристик:  (3.121)
(3.121) (3.122)
(3.122)

 0.(4.2)
0.(4.2)
 0. (4.3)
0. (4.3)
 (4.4)
(4.4)



 ,
, 
 , x> d
, x> d
 , x< - d
, x< - d

 ,
x<- d
,
x<- d
 ,
,  ,
x> d
,
x> d

 ,
h < x < -d
,
h < x < -d
 ,
d < x < h
,
d < x < h





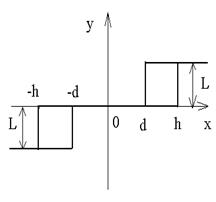
 y = L, x < h
y = 0, -d < x < h
y = - L, x < -d
при x1t> 0
y = L, x < h
y = 0, -d < x < h
y = - L, x < -d
при x1t> 0
 y= L, x> d
y= 0, -h< x< d
y = - L, x < -h
при x1t< 0
y= L, x> d
y= 0, -h< x< d
y = - L, x < -h
при x1t< 0

 (6.1)
(6.1) - постоянные коэффициенты собственного оператора системы;
- постоянные коэффициенты собственного оператора системы; - постоянные коэффициенты оператора воздействия.
- постоянные коэффициенты оператора воздействия. .
. , уравнение примет вид:
, уравнение примет вид: (6.2)
(6.2) 3. При приложении к автоматической системе какого-нибудь ограниченного по значению и времени управляющего или возмущающего воздействия (рисунок 6.1а) ее движение может быть различным. Однако условие устойчивости определяет три основных вида движения систем:
3. При приложении к автоматической системе какого-нибудь ограниченного по значению и времени управляющего или возмущающего воздействия (рисунок 6.1а) ее движение может быть различным. Однако условие устойчивости определяет три основных вида движения систем: 3) движение нейтральной системы (системы, находящейся на границе устойчивости) (рисунок 6.1г).
3) движение нейтральной системы (системы, находящейся на границе устойчивости) (рисунок 6.1г). , то есть однородное уравнение:
, то есть однородное уравнение: , (6.3)
, (6.3) (6.4)
(6.4)

 Эта формула показывает, что характер движения автоматической системы зависит от корней характеристического уравнения λ. Корни могут быть вещественными и комплексными. Характер свободного движения всей системы будет определяться суммой свободных составляющих. Причем система будет устойчива только тогда, когда все вещественные корни отрицательны и все комплексные корни имеют отрицательные вещественные части. Если корни характеристического уравнения нанести в виде точек на комплексную плоскость (рисунок 6.2), то устойчивость линейной системы можно характеризовать положением корней. Система будет устойчивой в случае, когда все корни характеристического уравнения будут находиться слева от мнимой оси (будут «левыми»), если хотя бы один из корней характеристического уравнения будет находиться справа от мнимой оси (будет «правым»), то система будет неустойчивой. Если характеристическое уравнение имеет нулевой корень или пару чисто мнимых корней, то система будет находиться на границе устойчивости, причем при наличии нулевого корня на апериодической границе устойчивости, а при наличии пары чисто мнимых корней на колебательной границе устойчивости.
Эта формула показывает, что характер движения автоматической системы зависит от корней характеристического уравнения λ. Корни могут быть вещественными и комплексными. Характер свободного движения всей системы будет определяться суммой свободных составляющих. Причем система будет устойчива только тогда, когда все вещественные корни отрицательны и все комплексные корни имеют отрицательные вещественные части. Если корни характеристического уравнения нанести в виде точек на комплексную плоскость (рисунок 6.2), то устойчивость линейной системы можно характеризовать положением корней. Система будет устойчивой в случае, когда все корни характеристического уравнения будут находиться слева от мнимой оси (будут «левыми»), если хотя бы один из корней характеристического уравнения будет находиться справа от мнимой оси (будет «правым»), то система будет неустойчивой. Если характеристическое уравнение имеет нулевой корень или пару чисто мнимых корней, то система будет находиться на границе устойчивости, причем при наличии нулевого корня на апериодической границе устойчивости, а при наличии пары чисто мнимых корней на колебательной границе устойчивости. (6.5)
(6.5) jω, тогда при подстановке корней можно записать таким образом:
jω, тогда при подстановке корней можно записать таким образом:  (6.6)
(6.6)