|
|
Производительность (номинальная) автоматических линий(сложного оператора) будет равна П нА = Н н j, при П н1 > П н2 > >... > П н j, т. е. наименьшей производительности j-го оператора (загрузчика, станка, транспортно-ориентирующего механизма), из которых состоит линия. Для повышения производительности в линию на параллельную работу включают два или более лимитирующих (наименее производительных) агрегатов. При этом П нА = = П н (j -1) и так далее. Если известно время простоев для каждого из операторов при их совместной работе в составе автоматической линии, коэффициент использования линии может быть найден следующим образом. Время
равно
Тогда соотношение технических производительностей станков, работающих вне линии и в составе ее при условии равенства номинальной производительности станков и линии, будет
где К Введем некоторые числовые значения. Пусть М = 0,02 р/ед, И = 0,001 р/ед, Э = 0,002 р/ед, А Переменные t = 6, 8, 10 шт. и Q =200 Подставив значения постоянных в (101), получим для 1—5 вариантов соответственно:
Результаты расчетов по формулам, приведенным выше, даны в табл. 13. Данные о затратах на изготовление единицы продукции показывают, какой из вариантов оснащения участка (станками или автоматическими линиями с различной концентрацией операций) лучше в экономическом отношении. Но для определения оптимальности варианта для конкретных условий производства необходимо выполнение ряда ограничений (см. главу 7). Выполнение важнейшего из них Пr >Qr предусмотрено алгоритмом выбора числа станков линий тi при расчете себестоимости обработки единицы продукции. Мы не будем рассматривать все многообразие ограничений, остановимся только на наиболее важных — производственной площади и съеме продукции с единицы площади. Рассчитаем эти показатели. Производственная площадь участка при производственной площади занимаемой каждым основным станком и вспомогательным механизмом S = 6 м2 и при условии, что Sn = 2S для станков с немеханизированной загрузкой и разгрузкой и Sn = S для автоматических линий и станков, оснащенных загрузочными и разгру- Производственная площадь как ограничение выступает в случае, когда требуется определить возможность размещения оборудования по анализируемому варианту на Sпр — производственной площади конкретного предприятия. При проектировании и сравнительной оценке вариантов автоматических линий более четким является ограничение по нормируемому съему продукции с единицы производственной площади. Съем продукции с единицы производственной площади в стоимостном выражении при условии, что на всех участках производства создается одинаковая стоимость и все участки имеют одинаковую площадь, равен
где Ц Q — стоимость (оптовая цена) единицы продукции: S r — производственная площадь по r-му варианту, рассчитывается по формулам (104); Q — нормативный съем продукции с единицы производственной площади; n — число участков, из которого состоит производство; Т = 4160 ч — годовой фонд времени. 10. ЧИСЛО ПАРАЛЛЕЛЬНЫХ ПОТОКОВ (ЛИНИЙ), шт.
11. ПРОИЗВОДСТВЕННАЯ ПЛОЩАДЬ, ЗАНИМАЕМАЯ ОБОРУДОВАНИЕМ, ы2
12. СЪЕМ ПРОДУКЦИИ С ЕДИНИЦЫ ПРОИЗВОДСТВЕННОЙ ПЛОЩАДИ, р/м2 В ГОД
Сделаем расчеты по формулам (104), (105), приняв Ц Q= 1 р., тогда значение съема продукции получим [единицы продукции/м2 производственной площади]. Результаты расчетов даны в табл. 11 и 12. 13. ЗАТРАТЫ (СЕБЕСТОИМОСТЬ) ОБРАБОТКИ ЕДИНИЦЫ ПРОДУКЦИИ
Анализ данных расчетов затрат, площадей и съема с единицы производственной площади позволяет сделать некоторые выводы общего характера. Оснащение оборудования механизмами для выполнения вспомогательных операций даже при многостаночном обслуживании менее эффективно по сравнению с применением автоматических линий. Причиной этого является то, что автоматизация отдельных станков требует значительно большего числа меха- низмов (загрузчики, разгрузчики, межстаночное транспортно-ори-ентирующее оборудование) и систем автоматики, а следовательно, и значительно больших капитальных затрат. Концентрация операций дает положительный эффект. Но с ростом концентрации операций (увеличением числа станков, включаемых в линию) понижается надежность, а следовательно, и производительность комплекса. При определенных объемах производства более прогрессивное оборудование оказывается менее эффективным экономически, так как для выполнения производственной прог-граммы в этих случаях требуется число автоматических линий большее, чем число потоков, составленных из тех же станков, что и линия, но работающих индивидуально. Очевидно, что для различных объемов производства оптимальным будет различный уровень автоматизации в концентрации операций. Но при одинаковом числе потоков (линий) преимущество во всех случаях на стороне автоматических линий с максимальной концентрацией операций. Чтобы автоматические линии с высоким уровнем концентрации операций были бы более экономически эффективными, необходимо следующее: устойчивые технологические процессы, не требующие частых вмешательств человека в управление ими; создание околостаночных механизмов с «очувствленными» рабочими органами,
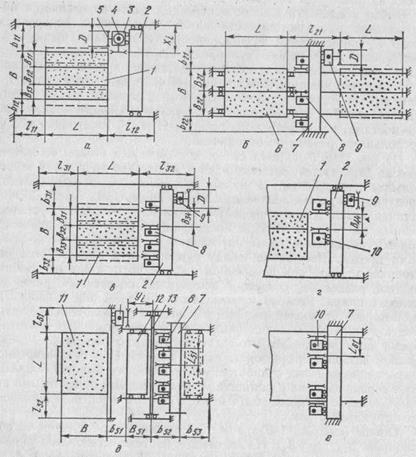
полностью исключающих человека из процесса загрузки, транспортировки заготовок и укладки деталей. В настоящее время при наличии автоматических загрузчиков и других механизмов человек освобожден от монотонного, тяжелого физического труда, но выполняет операции контроля и корректирования положения заготовок, контроля их качества и т. д. Автоматические линии, особенно с высоким уровнем концентрации операций, целесообразно оснащать системами автоматики, сокращающими внецикловые потери времени. Например, системами программного управления наладкой, контроля качества продукции, поиска неисправностей и др. Надежность всего оборудования линий должна быть высокой настолько, чтобы исключить недопустимые потери производительности. Применение автоматических линий дает не только экономический, но и огромный социальный эффект (снижаются текучесть. кадров, уровень заболеваемости, исчезают негативные социальные явления, повышаются технологическая и трудовая дисциплина и т. д.) и приводит к лучшему использованию производственных площадей. Механизированные и автоматизированные модули (станки, оснащенные загрузочно-разгрузочным оборудованием) как по прямым эксплуатационным затратам, так и по использованию площадей менее эффективны. Они эффективны только для выполнения операций по обработке деталей с малым объемом выпуска. Применение автоматических линий даже с учетом их меньшей в 1,5—2,0 раза производительности улучшает использование производственных площадей. Причем оптимальный уровень концентрации операций зависит от объема производства. Анализ данных табл. 11—13 позволяет сделать еще один очень важный вывод. Затраты на единицу продукции снижаются, а съем с единицы производственной площади повышается по мере сближения объема производства и технических возможностей оборудования (его производительности). Затем в критической точке П т =Q § 67. ЛИНИИ РАСКРОЯ ПЛИТ Линии раскроя плит состоят из загрузчика, раскройного автомата, разгрузочно-распределительного устройства. Вид загрузочных и разгрузочных устройств определяется видом раскраиваемых плит: черновых или с облагороженной поверхностью (ламинированных, облицованных, окрашенных). Схема линии для раскроя необлицо-ванных плит показана на рис. 139, а. На подъемном столе 1 находится стопа плит 2. Сверху стопы толкателем 3 сталкивается пачка плит высотой, определяемой технической характеристикой раскройного автомата 4. Обычно на каретке толкателя 3 имеется еще один захват, который выталкивает заготовки из автомата, и они по роликовым конвейерам 5 подаются к месту сброса. Заготовки формируются в стопы на подъемных столах 6. На каждом столе укладывают заготовки 2—3 типоразмеров. Рис. 139. Линии раскроя плит: а — необлицованных; б — облицованных При раскрое плит с облагороженной поверхностью применяют более сложные загрузчики для того, чтобы не повредить поверхность плит. Схема такой линии показана на рис. 139, б. На подъемном столе 1 находится стопа плит 2. Верхняя плита захватывается вакуумными присосками 7, установленными на траверсе 8. Траверса поднимается, и каретка 9 перемещается вправо. Плиты укладываются в стопу 10, которая по конвейеру 11 подается в раскройный автомат 4. Этот же конвейер выносит заготовки из автомата в зону разборки. При загрузке (разгрузке) раскройного автомата конвейер 11 поднимается над уровнем стола. Существуют и другие устройства загрузки пачки плит в раскройный автомат. Например, пачки могут перемещаться с помощью толкателей по выдвигаемым роликам. Разборка заготовок осуществляется специальным механизмом. Каждая заготовка из верхнего ряда пачки захватывается пневмо-присосками 7, каждая из которых (или группа) установлены на ползунах 12. Траверса 13 поднимается, каретка 14 смещается вправо, ползуны 12 расходятся в стороны. Между заготовками образуется разрыв. В таком разомкнутом состоянии заготовки укладываются на подъемный стол 15. Наибольшую сложность представляют раскройные автоматы. В целях повышения производительности одновременно раскраивается несколько плит (от 3 до 10). Существуют несколько типов раскройного оборудования. Все они предназначены для повышения производительности и увеличения технологических возможностей в области полезного выхода деталей из заготовок. Полезный выход может быть повышен за счет возрастания точности раскроя и повышения качества кромок (уменьшения столов, что особенно важно при раскрое облагороженных плит). Но эта задача не может быть решена только применением автоматики, так как многое зависит от инструмента, его конструкции и качества подготовки. В зависимости от технологической схемы выделяют следующие виды раскройных автоматов: а) с последовательным, параллельным и поэтапным продольным и поперечным раскроем; б) с совмещенным и поочередным выполнением резов (продольных или поперечных). На рис. 140, а — г даны схемы станков споследователь-н ы м раскроем: на станке сначала выполняются все последовательные, а затем все поперечные резы для каждой пачки плит. Плиты могут быть раскроены по одной из следующих схем: I — со сквозными резами (рис. 140, и); II—с несовпадающими поперечными резами в полосах, находящихся в двух (или более) зонах шириной B 1 ± Раскройные автоматы с последовательным раскроем бывают: с подвижным порталом, на котором закрепляется блок пил; с подвижным столом, пилы располагаются на неподвижной траверсе. Производственная площадь станков с подвижным порталом меньше, чем у станков с подвижным столом. На рис. 140, а показана схема станка с подвижным порталом. Плиты укладывают на раздвижной стол 1. На портале 2 закреплен суппорт 3, перемещающийся вдоль него. На суппорте имеется поворотный узел 4, занимающий три позиции через 90°, на котором закреплен пильный шпиндель 5. Поворотный узел 4 способен вертикально перемещать пилу над пакетом плит. Раскройный автомат имеет программное управление, позволяющее осуществить заданную последовательность операций и позиционирование портала 2 и суппорта 3. Цикл работы станка следую- щий. На стол загружают, выравнивают и закрепляют плиты. Узел 4 поворачивается на 90° против часовой стрелки и опускается. Суппорт 3 позиционируется (устанавливается в координату X1) для первого продольного реза. Портал перемещается влево — создается продольный рез. Узел 4 разворачивается на 180°, суппорт 3 занимает позицию, соответствующую координате следующего реза. Портал смещается вправо. Цикл повторяется столько раз, сколько продольных резов необходимо сделать. Затем крайние части стола разводятся и полосы (одна или несколько), находящиеся на крайних и средней частях стола, раскраиваются по индивидуальной программе. В зависимости от фактического плана раскроя сначала могут быть раскроены полосы, находящиеся на одной части стола, а затем на других. Или поочередно могут выполняться резы на полосах на различных частях стола. Выбор последовательности поперечных резов определяется минимизацией продолжительности цикла. Координаты поперечных резов Yi определяются позиционированием портала. Подача осуществляется перемещением суппорта 3. Портал при поперечном раскрое передвигается, когда пила находится вне пределов стола или в промежутке между его раздвинутыми частями. Чтобы суппорт 3 не совершал холостых ходов, предусмотрен разворот узла 4 вместе с пилой на 180°. Станок обладает высокими технологическими возможностями, реализует схемы раскроя II и IV. Расстояние между продольными резами не ограничено. На рис. 140, б показан станок с подвижным столом 6, состоящим из двух частей, смещающихся относительно друг друга в продольном направлении. В целях повышения производительности предусмотрено совмещенное выполнение продольных резов. Обычно устанавливают до пяти продольных пил на суппортах 8, установленных на траверсе 7. При продольном раскрое стопа движется вправо, продольные пилы опускаются и происходит раскрой за один проход. Расстояние между суппортами 8 определяется настройкой станка, при поперечном раскрое части стола позиционируются раздельно, совмещая координаты поперечных резов на полосах плиты. Раскрой производится при движении суппорта 9, на котором установлен пильный механизм. При холостом ходе суппорта 9 пильный механизм поднимается, что позволяет в это же время позиционировать стол для следующего поперечного реза. Станок позволяет реализовать схемы раскроя II и IV. Батарейное размещение пильных суппортов для продольного раскроя накладывает ограничение на расстояние между смежными продольными резами, которое не может быть менее B23 — размера, определяемого конструкцией станка. Станок (см. рис. 140, в) имеет раздвижной стол из трех частей, шириной В31, В32, В33. На подвижном портале установлено до пяти суппортов для продольной распиловки. Поперечный раскрой ведется пильным механизмом, установленным на суппорте 9. Этот станок в сравнении со станком, выполненным по схеме на рис. 140, а, имеет более высокую производительность, но расстояние между смежными продольными резами ограничено конструктивным размером В34. С увеличением числа плит, раскраиваемых одновременно, растет размер В34, что ухудшает технологические возможности — схему раскроя и полезный выход. Поэтому для станков большой мощности и с высокими технологическими свойствами может оказаться рациональной схема, показанная на рис. 140, г. Вместо батарейного размещения продольных пил применяют меньшее число позиционируемых продольных пильных суппортов с расстоянием между ними В41 >B34. Так как продольный раскрой в этом случае выполняется в два и больше прохода (для каждого прохода суппорта меняют координаты), резы могут выполняться через один и, следовательно, ширина полосы может быть не менее 0,5 B41.
Раскройные автоматы с параллельным продольным и поперечным раскроем имеют меньший цикл работы, но занимают значительные производственные площади. На рис. 140, д показана схема, по которой выполнена линия МРП. Толкатель 11 подводит пакет плит до упора 13, который позиционируется перед каждым продольным резом (если ширина полосы различная). Продольная пила поднимается, суппорт 9 перемещается, и от плиты отрезается полоса шириной Yi, которая перегружается на каретку 12, зажимается и подается к пилам поперечного раскроя 8. Число пил в батарее равно числу поперечных резов с различными координатами во всех полосах схемы раскроя. Обычно число резов 8—11. По программе из всех пил выбирают только участвующие в раскрое данной полосы. Эти пилы опускаются, и при движении каретки вправо происходит поперечный раскрой. Однако по конструктивным возможностям пилы не могут быть сближены более чем на L51. Для реальных станков L51 = 200—240 мм. При таком ограничении технологические возможности станка оказываются явно неудовлетворительными и часто приходится прибегать к дополнительному подраскрою. Для устранения этого недостатка можно рекомендовать вместо пильных суппортов 8, расстанавливаемых на траверсе 7 при настройке, применить поперечные суппорты 10, позиционируемые перед раскроем каждой полосы. При этом расстояние между резами
Рис. 140. Схемы раскройных стан а—г — с последовательный раскроем в продольном и поперечном направлениях; д—з— с о сквозными резами; к — то же с совпадающими поперечными резами в полосах, нахо деляемой го ков и схемы раскроя плит: с параллельным раскроем в продольном и поперечном направлениях; и — раскрой плиты дящихся в зоне; л — с несовпадающими поперечными резами в каждой полосе; м — с отловной частью в одной полосе ограничено, оно не может быть меньше L61 (рис. 140, е). Но резы в соседних полосах независимы. На станке, выполненном по схеме (рис. 140, ж), можно раскраивать плиты без ограничения в расстояниях между продольными и поперечными резами, т. е. он позволяет реализовать схему раскроя III. Пачка плит позиционером 14 перемещается на расстояние, равное ширине полосы. Пильный суппорт 9 перемещается вправо (пила выдвинута в рабочее положение) и делает рез. Полоса смещается вправо, и позиционер 15 подает ее к пиле поперечного раскроя. Цикл станка определяется временем последовательного раскроя каждой полосы. В целях повышения производительности можно совместить по времени поперечный раскрой всех полос (рис. 140, з). Плита полностью раскраивается в продольном направлении. Каждая полоса (группа полос), шириной В81, В82, В83, отдельным позиционером 15 подается к поперечному суппорту до совпадения поперечных резов. Выбор оптимальной схемы раскройного автомата производят по времени цикла (производительности), площади, технологическим возможностям (полезному выходу при конструктивных ограничениях на расстояния между соседними продольными и поперечными рядами) и стоимости. Практика показывает, что для получения высоких технологических возможностей в раскройном оборудовании требуется большое число рабочих органов с автоматическим позиционированием. Это ведет к увеличению сложности и стоимости станка (росту амортизационных отчислений иэксплуатационных расходов). Скомпенсировать дополнительные затраты можно лишь за счет роста производительности станка, что обычно достигается благодаря увеличению мощности станка и числа плит в раскраиваемом пакете. Раскройное оборудование требует частых переналадок. Для обеспечения производства необходимым числом типоразмеров заготовок в заданных объемах следует в течение организационного периода (5—10 сут) реализовать раскрой по 20—50 и более схемам. Для повышения производительности (сокращения периода переналадки) на станках применяют системы автоматической наладки. Схемы систем программного управления и автоматической наладки будут рассмотрены в главе 12. § 68. ЛИНИИ ОБЛИЦОВЫВАНИЯ ПЛИТ Линии облицовывания, а также линии склеивания дверных полотен и изготовления древесных плит строят на базе прессов плоского прессования. В последнее время для облицовывания синтетическими пленками стали применять коландровые или роликовые прессы. Процесс облицовывания в них получил название кэширования. Линии на базе прессов плоского прессования имеют участок формирования пакета (ковра) и участок собственно прессования. Время прессования зависит от применяемых клея и облицовочного материала. Чем больше время прессования, тем большей площади прессовый пакет может быть набран. Площадь плит пресса должна быть равна площади прессовых пакетов. Поэтому при склеивании дверных полотен и в производстве плит, отличающемся дли-тельным временем прессования (2—8 мин), применяют многопролетные прессы. При облицовывании (время прессования малое 0,6—1,5 мин) используют однопролетные прессы. Преимущество однопролетных прессов состоит и в том, что они имеют более простое оборудование для загрузки и разгрузки.
Рис. 141. Линия облицовывания на базе однопролетного пресса Д493.8 Схема линии облицовывания. На рис. 141 показана схема, построенная на базе однопролетного пресса Д493.8. Щиты из магазинного питателя с подъемным столом 1 и сталкивателем 2 подаются в клеенамазывающие вальцы 3, а затем попадают на дисковый конвейер 4. Рабочие, стоящие по обе стороны конвейера 7, вручную из пачки 5 кладут нижнюю облицовку на конвейер. Затем на нее кладут щит, находящийся на дисковом конвейере, и накрывают щит верхней облицовкой из пачки 6. По команде оператора включается конвейер и продвигает пакет к прессу, освобождая место для сборки следующего пакета. За время прессования обычно весь конвейер 7 заполняется подготовленными пакетами. После окончания прессования пресс 9 раскрывается (опускается нижняя плита), включается на высокой скорости приемный конвейер 10. Каретка 8, на которой установлен конвейер 7, входит в пролет пресса на повышенной скорости. Передняя кромка каретки выталкивает из пресса облицованные щиты, которые поступают на конвейер 10. Когда каретка полностью вой-дет в пресс, конвейер 10 переключится на пониженную скорость. Одновременно включается медленная скорость движения каретки из пресса и конвейер 7. Скорости каретки и конвейера одинаковые, но направлены в разные стороны. Это обеспечит сход пакетов с конвейера 7 и укладку их на плиту пресса. Каретка возвращается в исходную позицию. Пресс автоматически смыкается, и начинается следующий цикл прессования. Во время загрузки пресса и прессования облицованные щиты с конвейера 10 переходят на подвижный конвейер 11 и укладываются в стопу на конвейере 12. По мере увеличения высоты стопы конвейер 11 поднимается. После набора полной стопы она смещается по конвейеру 12 в сторону, конвейер 11 опускается вниз и начинается набор следующей стопы. Существуют и другие конструкции загрузочных устройств прессов. Например, по плите пресса может перемещаться непрерывная термостойкая лента с упором, выдвигающим щиты из пресса. На эту же ленту поступают пакеты с наборного конвейера при загрузке пресса. Набор прессовых пакетов производят вручную. Конвейер 7 смещается по команде оператора. Загрузка щитов на линию, загрузка пресса, прессование и укладка облицованных щитов происходят в автоматическом или полуавтоматическом режиме. Схемы управления загрузочными устройствами будут рассмотрены в главе 12. Схемы управления прессами. Рассмотрим работу гидравлической и электрической схем управления прессом Д493.8. Схемы управления прессами имеют много общего. Пресс оснащен тремя насосами. Насос высокого давления (НВД) (20—32 МПа) обеспечивает требуемое усилие прессования, насос среднего давления (НСД) (5—7 МПа) и высокий расход применяется для смыкания плит, а насос низкого давления (ННД) (2 МПа) служит для создания давления в системе управления, Насос высокого давления аксиально-поршневой имеет привод от электродвигателя М2, лопастные насосы НСД и ННД выполнены в одном блоке и приводятся электродвигателем Ml. Клапаны с переливным золотником КП1, КП2 и КП3 служат для поддержания давления в соответствующей гидросистеме. Обратные клапаны OK1 и ОК2 включены в схему, чтобы исключить утечки масла через насосы. Плунжеры Ц1 и Ц2 служат для быстрого смыкания плит, а плунжеры Ц3 — Ц9 — для создания требуемого усилия прессования. В плунжерах Ц1 и Ц2 масло подается через гидрораспределитель ГР1 с электрогидравлическим управлением. Трехходовой распределитель при подаче управляющего давления на левый и правый сервоцилиндры занимает среднее положение, и масло через фильтр Ф1 сливается в бак. При смыкании плит включится электромагнит УА1, управляющий золотником-пилотом, который подает масло к левому сервоцилиндру ГР1, а правый соединит со сливом. Рабочее давление будет поступать в цилиндры Ц1 и Ц2. Одновременно от насоса НВ6 масло будет поступать в плунжер Ц3 — Ц9. При смыкании плит в гидросистеме среднего давления будет создано предельное давление, и реле давления РД подаст команду на отключение УА1. Далее в прессе усилие будет возрастать за счет работы насоса НВД. Когда в гидросистеме будет максимальное давление, необходимое для создания требуемого усилия прессования (в зависимости от площади облицовываемых щитов, клея, материала облицовки), электроконтактный манометр ЭКМ подаст сигнал на остановку насоса НВД. В процессе прессования за счет усадки материала и утечек масла давление в прессе будет падать. При минимальном давлении ЭКМ подаст команду на включение НВД и произойдет восстановление усилия в прессе. После окончания прессования насос НВД отключится. Включатся электромагниты УА2 управляющего распределителя ГР1, и рабочий золотник гидрораспределителя ГР1 соединит цилиндр Ц1 и Ц2 со сливом. Одновременно электромагнит УА3 переключит гидрораспределитель ГР2 и управляющее давление будет подано на сервоцилиндр, который откроет наполнительный клапан КН1. Из главных цилиндров масло сольется в бак. После опускания плиты пресса в крайнее нижнее положение схема управления гидросхемой будет приведена в исходное состояние для повторного цикла. На рис. 142 представлена электрическая схема управления однопролетным прессом. Схемы управления загрузчиками и другими околопрессовыми механизмами опущены. В схеме имеются упрощения, отсутствуют защита, сигнализация, блок питания. Схема имеет два режима управления: автоматический и полуавтоматический. При автоматическом режиме включение прессования производится контактом реле КМА, которое срабатывает автоматически после окончания загрузки пресса и возврата каретки в исходное положение. Распрессовка также происходит автоматически. При полуавтоматическом режиме смыкание плит, создание давления и прессование происходят при нажатии на кнопку SB2, а распрессовка — при нажатии на кнопку SB3 (горизонталь 14). Для прекращения смыкания следует нажать на кнопку SB1. Размыкание плит возможно только при работающем насосе ННД. Полуавтоматический   Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 р=
р=  j Техническое обслуживание всех агрегатов линии ведется одновременно. Но обслужить линию сложнее, чем самый сложный станок, входящий в ее состав, поэтому
j Техническое обслуживание всех агрегатов линии ведется одновременно. Но обслужить линию сложнее, чем самый сложный станок, входящий в ее состав, поэтому  j. Настройка станков в линии ведется параллельно, и в зависимости от числа рабочих время настройки линии будет
j. Настройка станков в линии ведется параллельно, и в зависимости от числа рабочих время настройки линии будет  р. а= 0,1,
р. а= 0,1,  , а потери времени по организационным причинам можно считать одинаковыми как для всей линии, так и для любого отдельного станка
, а потери времени по организационным причинам можно считать одинаковыми как для всей линии, так и для любого отдельного станка 


 =
=  600 ед/ч;
600 ед/ч;  Q =50 ед/ч.
Q =50 ед/ч.