|
|
Этапы развития автоматизацииСтр 1 из 8Следующая ⇒ Этапы развития автоматизации Автоматизация производства - это процесс, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам. Автоматизация - это основа развития современной промышленности, генеральное направление научно-технического прогресса. Цель автоматизации производства заключается в повышении эффективности труда, улучшении качества выпускаемой продукции, в создании условий для оптимального использования всех ресурсов производства. Различают автоматизацию производства: частичную, комплексную и полную. При частичной автоматизации часть функций управления производством автоматизирована, а часть выполняется рабочими-операторами (полуавтоматические комплексы). Как правило, такая автоматизация осуществляется в тех случаях, когда управление процессами в следствие их сложности или скоротечности практически недоступно человеку. При комплексной автоматизации все функции управления автоматизированы, рабочие-операторы только налаживают технику и контролируют её работу (автоматические комплексы). Комплексная автоматизация требует применения таких систем машин, оборудования, вспомогательной техники, работа которых превращает исходные материалы в готовый продукт без физического вмешательства человека. Полная автоматизация производства - высшая ступень автоматизации, которая предусматривает передачу всех функций управления и контроля комплексно-автоматизированным производством автоматическим системам управления. Развитие автоматизации производства можно условно подразделить на три этапа. Первый этап автоматизации охватывает период времени с начала XVIII до конца XIX столетия. В 20-е годы XVIII столетия в России А.Нартовым был разработан автоматический суппорт для токарно-копировального станка. В 1765 г. русским механиком И.И.Ползуновым - творцом первой паровой машины универсального назначения - был создан первый в мире промышленный автоматический регулятор для поддержания постоянного уровня воды в котле паровой машины. Измерительный орган - поплавок, находящийся на поверхности воды, перемещаясь, изменял подачу жидкости, идущей по трубе в котёл через отверстие клапана. Если уровень воды поднимался выше положенного, то поплавок, перемещаясь вверх, закрывал клапан и подача воды прекращалась. В регуляторе Ползунова была реализована идея, являющаяся и поныне центральной в устройствах автоматического регулирования. В 1784 г. английским механиком Дж. Уаттом также для паровой машины был разработан центробежный регулятор скорости. В течение всего XIX столетия происходило совершенствование регуляторов для паровых машин. На первом этапе развития автоматизации были попытки создания автоматических станков и линий с жёсткой кинематической связью. Следует отметить, что развитие автоматизации производства в этот период времени основывалось на принципах и методах классической механики. Второй этап развития автоматизации производства охватывает период времени конец XIX и середина XX столетия. Этот этап связан с развитием электротехники и практическим использованием электричества в средствах автоматизации. В частности, важное значение имеет изобретение П.Л.Шиллнгом магнитоэлектрического реле (1850 г.) - одного из основных элементов электроавтоматики, разработка Ф.М.Балюкевичем и др. в 80-х г.г. XIX столетия ряда устройств автоматической сигнализации на ж.-д. транспорте, создание С.Н.Апостоловым-Бердичевским и др. первой в мире автоматической телефонной станции. К началу XX века относится широкое развитие и использование электрических систем автоматического регулирования. Индивидуальный привод отдельных рабочих органов машин и введение между ними электрических связей существенно упростили кинематику машин, сделали их менее громоздкими и более надёжными. Будучи более гибкими и удобными в эксплуатации, электрические связи позволили создать комбинированное электрическое и механическое программное управление, обеспечивающее автоматическое выполнение неизмеримо более сложных операций, чем на машинах-автоматах с механическим программным устройством. Для второго этапа развития автоматизации характерно появление электронно-программного управления: были созданы станки с числовым программным управлением, обрабатывающие центры и автоматические линии, содержащие в качестве компонента оборудование с программным управлением. Сороковые-пятидесятые годы XX столетия ознаменовались началом бурного развития радиоэлектроники. Электронные устройства обеспечивают более высокие быстродействия, чувствительность, точность и надежность автоматических систем. Наступил третий этап развития автоматизации с широким использованием управляющих ЭВМ, которые для каждого момента времени рассчитывают оптимальные режимы технологического процесса и вырабатывают управляющие команды по всем автоматизируемым операциям. Переходом к третьему этапу развития автоматизации послужили новые возможности ЧПУ, основанные на применении микропроцессорной техники, что позволило создавать принципиально новую систему машин, в которой сочетались бы высокая производительность автоматических линий с требованиями гибкости производственного процесса. Современные микроэлектроника и ЭВМ позволяют достичь высшего уровня автоматизации. Ультразвуковые расходомеры. Принцип действия заключается в направлении ультразвукового луча в направлении по потоку и против потока и определении разницы времени прохождения этих двух лучей. Разница во времени пропорциональна скорости течения газа. До 2002 года в России ультразвуковые расходомеры на газ не выпускались. В настоящее время выпускаются ультразвуковые расходомеры «Гобой-1» на расходы 10, 16, 25, 40, 65, 100 м3/ч, на трубопроводы от 25 до 80 мм., для абсолютных давлений до 2 кгс/см 2, УБСГ-001 на расходы от 0,1 до 16 м3/ч., УБСГ-002 на расходы от 0,16 до 25 м3/ч Ду=1.1/42, (32 мм) и «ГАЗ-001» для трубопроводов большего диаметра (более 100 мм.) и для давлений до 60 кгс/см 2, но полного типоразмерного ряда Производитель не опубликовал. Ультразвуковой расходомер-счетчик «Днепр-7» с накладными датчиками излучателями-приемниками. Принцип действия расходомера-счетчика основан на преобразовании доплеровской разности частот отражений ультразвука от движущихся неоднородностей потока, линейно зависящей от скорости движения потока. Автокубатурники.
Измерения влажности. Влажностью материала называют содержание в нем воды в процентах по отношению к массе абсолютно сухого материала (абсолютная влажность) или по отношению к массе влажного материала (относительная влажность). Для автоматического определения влажности используют: радиоизотопный метод, в котором мерой влажности служит ослабление Наибольшее распространение имеет диэлькометрический метод, основанный на зависимости диэлектрической проницаемости материала е от влажности. Если для воды е=81, то для древесины она равна 2,5–7. Специально для измерения влажности измельченной древесины УкрНИИМОД разработал влагомеры с емкостным и индуктивным датчиками. Датчик устанавливают в потоке стружки так, что часть ее непрерывно проходит через датчик. Колебания влажности стружки приводят к изменению емкости (индуктивности) датчика, включенного в колебательный контур измерительного генератора высокой частоты, и к изменению частоты колебаний. Отклонение частоты колебаний измерительного генератора от частоты колебаний опорного генератора с помощью детектора преобразуется в пропорциональное изменение постоянного тока, измеряемого микроамперметром, проградуированным в процентах влажности. Влагомер с емкостным датчиком имеет два диапазона измерений–1,5–15 и 15–30%; погрешность измерений 1–1,5%. Прибор с индуктивным датчиком имеет диапазоны 2–10; 10–50; 40–100% с погрешностью 2; 4 и 10% соответственно. Большой опыт по влагометрии древесных материалов накоплен в ЛТА им. С. М. Кирова. Разработанные ею влагомеры для лущеного шпона эксплуатируются на многих предприятиях. Имеются образцы подобных же влагомеров, сделанных другими организациями. При этом для создания однородного слоя стружки применяют шнековые датчики. Однако серийное производство влагомеров для стружки не организовано. В последнее время для измерения влажности используют инфракрасное излучение. Исследования показали, что в зависимости от длины волны света поглощение, его молекулами воды различно Так, разность поглощения света двумя образцами бумаги с влажностью 4 и 6% при длине волны 1,7 мкм оказалась незначительной, а при длине волны 1,9 мкм очень заметной. Любые другие факторы, кроме влажности, одинаково сказываются на результатах измерений при той и другой длине волны. Таким образом, сравнивая поглощение света материалом при разных частотах, можно оценить влажность образца. Приборы, выполненные по этому принципу, имеют равномерную шкалу, диапазон измерений от 0–1 до 0–80% относительной влажности, погрешность ± 1 % от измеряемого диапазона влажности. Датчик устанавливают на расстоянии 100– 200 мм от контролируемого тела. Преимуществом прибора является бесконтактность измерений и его пригодность для определения влажности различных материалов: картона, бумаги, пластиков, древесной массы. Однако он реагирует главным образом на поверхностную влагу тела, а не на влагу, содержащуюся во всем объеме. Влажность газов и воздуха также оценивают их абсолютной или относительной величиной. Абсолютная влажность измеряется количеством (в граммах) водяного пара, находящегося в 1 м3 воздуха. Относительной влажностью называют отношение массы водяного пара в граммах, содержащегося в 1 м3 воздуха, к массе пара, который мог бы содержаться в этом объеме при той же температуре и давлении при полном насыщении. Для измерения влажности газов, например воздуха в сушильных камерах, используют психрометрический метод, основанный на измерении охлаждения поверхности увлажненного тела при испарении с нее воды в зависимости от влажности газа. Наибольшее распространение имеют электронные психрометры ПЭ, измеряющие разность температур «сухого» и «мокрого» термометров, зависящую от влажности газа, величины барометрического давления и скорости обтекания «мокрого» термометра газом. В этом устройстве два термометра сопротивления вмонтированы в протяжную камеру, через которую вытяжным устройством просасывается предварительно очищенный фильтром воздух под давлением 0,1–0,2 МПа, омывающий термометры. Максимальная разность температур достигается при скорости газа 4 м/с. В комплект датчика входят также резервуар, герметический бачок с дистиллированной, водой с примесью сулемы (1 часть на 20000 частей воды), которая смачивает «чулок» из муслина или марли мокрого термометра. Вторичным прибором служит, двойной разностный автоматический мост ЭМП-68М2, который может иметь контактное устройство, реостатный задатчик или пневматическую регулирующую приставку. Датчик выполняется в двух модификациях: для воздуха в помещении с температурой от 283 до 313 К и для газа и воздуха в трубопроводе с температурой от 313 до 373 К. Пределы измерений 20–100% относительной влажности, погрешность ±3%.
Исполнительные органы. Электромагниты в составе электромагнитных клапанов как исполнительные механизмы применяются в схемах двухпозиционного регулирования, когда регулирующий орган может находиться только в двух конечных положениях, например «открыто» или «закрыто». Электромагниты выпускаются однофазные, трехфазные переменного тока и постоянного тока, длинноходовые и короткоходовые. Длинноходовые электромагниты (рис. 1,б) имеют якорь 1 стержневого типа, ход якоря 50... 150 мм. Короткоходовые электромагниты (рис. 1, а) имеют наибольший ход в пределах 2...5 мм. Тяговые характеристики электромагнитов показаны на рис. (1,в, 1,г). Тяговое усилие уменьшается с увеличением зазора
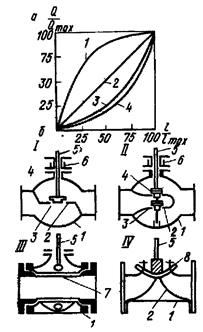
Рис. 1. Схемы и характеристики электромагнитов Регулирующие органы. Регулирующие органы (клапаны, задвижки, заслонки, краны) составляют часть объектов регулирования, вследствие чего их характеристики существенно влияют на характеристики объектов. При автоматизации производства требуется заказывать регулирующий орган, определив предварительно его тип, диаметр и характеристику, или приспосабливать имеющийся на объекте. Установленные на производственных агрегатах вентили, задвижки и т. д. используются обычно для запирания трубопроводов, поэтому их размеры и характеристики часто не удовлетворяют требованиям автоматического регулирования. Пропускной характеристикой регулирующего органа называют зависимость между расходом через него жидкости или газа G (по отношению к максимальному расходу) и ходом затвора 1, перекрывающего поток (по отношению к полному ходу), а конструктивной характеристикой–зависимость между площадью проходного сечения и ходом затвора. При постоянном перепаде давления на регулирующем органе эти характеристики совпадают. Возможные характеристики представлены на рис. 1, а. Характеристика 1 показывает, что регулирующее воздействие уменьшается с возрастанием расхода и при постоянной скорости перемещения затвора скорость регулирования при малых расходах во много раз больше, чем при больших. Это неблагоприятно для регулирования и может заметно ухудшить его качество.
Рис 1. Регулирующие клапаны: а – характеристики, б – устройство При характеристиках 3 и 4 увеличению расхода соответствует возрастание регулирующего воздействия, поэтому, если скорость перемещения затвора постоянна, при больших нагрузках скорость регулирования оказывается более высокой, чем при малых расходах. Подобные характеристики широко используют на практике так же, как и прямолинейные 2. Наиболее широко при автоматическом регулировании применяют регулирующие клапаны, устройство которых показано на рис. 1, б. Клапан состоит из корпуса 1, фигурной перегородки 2 с седлом 3 и затвора (плунжера) 4, укрепленного на штоке 5, перемещающемся в сальнике 6. В односедельном клапане 1 регулируемая среда действует на плунжер с одной стороны и усилие для перемещения штока, равное произведению площади плунжера на перепад давлений в закрытом состоянии, может оказаться большим, что потребует применения довольно мощного исполнительного механизма. В двухседельном клапане // давление среды действует на верхнюю и нижнюю полости затвора, силы взаимно уравновешиваются и перемещение затвора не требует значительных усилий. Для волокнистой массы, а также вязких и волокнистых сред применяются шланговые /// и диафрагмовые IV регулирующие органы, имеющие резиновый шланг 7 или мембрану 8. Их основным преимуществом является отсутствие помех движению среды. Шланговое устройство пригодно только для регулирования, а диафрагмовое может служить и для запирания трубопровода. Регулирующие клапаны изготовляют с логарифмической параболической и прямолинейной характеристиками. Структура и задачи АСУ ТП. Этапы развития автоматизации Автоматизация производства - это процесс, при котором функции управления и контроля, ранее выполнявшиеся человеком, передаются приборам и автоматическим устройствам. Автоматизация - это основа развития современной промышленности, генеральное направление научно-технического прогресса. Цель автоматизации производства заключается в повышении эффективности труда, улучшении качества выпускаемой продукции, в создании условий для оптимального использования всех ресурсов производства. Различают автоматизацию производства: частичную, комплексную и полную. При частичной автоматизации часть функций управления производством автоматизирована, а часть выполняется рабочими-операторами (полуавтоматические комплексы). Как правило, такая автоматизация осуществляется в тех случаях, когда управление процессами в следствие их сложности или скоротечности практически недоступно человеку. При комплексной автоматизации все функции управления автоматизированы, рабочие-операторы только налаживают технику и контролируют её работу (автоматические комплексы). Комплексная автоматизация требует применения таких систем машин, оборудования, вспомогательной техники, работа которых превращает исходные материалы в готовый продукт без физического вмешательства человека. Полная автоматизация производства - высшая ступень автоматизации, которая предусматривает передачу всех функций управления и контроля комплексно-автоматизированным производством автоматическим системам управления. Развитие автоматизации производства можно условно подразделить на три этапа. Первый этап автоматизации охватывает период времени с начала XVIII до конца XIX столетия. В 20-е годы XVIII столетия в России А.Нартовым был разработан автоматический суппорт для токарно-копировального станка. В 1765 г. русским механиком И.И.Ползуновым - творцом первой паровой машины универсального назначения - был создан первый в мире промышленный автоматический регулятор для поддержания постоянного уровня воды в котле паровой машины. Измерительный орган - поплавок, находящийся на поверхности воды, перемещаясь, изменял подачу жидкости, идущей по трубе в котёл через отверстие клапана. Если уровень воды поднимался выше положенного, то поплавок, перемещаясь вверх, закрывал клапан и подача воды прекращалась. В регуляторе Ползунова была реализована идея, являющаяся и поныне центральной в устройствах автоматического регулирования. В 1784 г. английским механиком Дж. Уаттом также для паровой машины был разработан центробежный регулятор скорости. В течение всего XIX столетия происходило совершенствование регуляторов для паровых машин. На первом этапе развития автоматизации были попытки создания автоматических станков и линий с жёсткой кинематической связью. Следует отметить, что развитие автоматизации производства в этот период времени основывалось на принципах и методах классической механики. Второй этап развития автоматизации производства охватывает период времени конец XIX и середина XX столетия. Этот этап связан с развитием электротехники и практическим использованием электричества в средствах автоматизации. В частности, важное значение имеет изобретение П.Л.Шиллнгом магнитоэлектрического реле (1850 г.) - одного из основных элементов электроавтоматики, разработка Ф.М.Балюкевичем и др. в 80-х г.г. XIX столетия ряда устройств автоматической сигнализации на ж.-д. транспорте, создание С.Н.Апостоловым-Бердичевским и др. первой в мире автоматической телефонной станции. К началу XX века относится широкое развитие и использование электрических систем автоматического регулирования. Индивидуальный привод отдельных рабочих органов машин и введение между ними электрических связей существенно упростили кинематику машин, сделали их менее громоздкими и более надёжными. Будучи более гибкими и удобными в эксплуатации, электрические связи позволили создать комбинированное электрическое и механическое программное управление, обеспечивающее автоматическое выполнение неизмеримо более сложных операций, чем на машинах-автоматах с механическим программным устройством. Для второго этапа развития автоматизации характерно появление электронно-программного управления: были созданы станки с числовым программным управлением, обрабатывающие центры и автоматические линии, содержащие в качестве компонента оборудование с программным управлением. Сороковые-пятидесятые годы XX столетия ознаменовались началом бурного развития радиоэлектроники. Электронные устройства обеспечивают более высокие быстродействия, чувствительность, точность и надежность автоматических систем. Наступил третий этап развития автоматизации с широким использованием управляющих ЭВМ, которые для каждого момента времени рассчитывают оптимальные режимы технологического процесса и вырабатывают управляющие команды по всем автоматизируемым операциям. Переходом к третьему этапу развития автоматизации послужили новые возможности ЧПУ, основанные на применении микропроцессорной техники, что позволило создавать принципиально новую систему машин, в которой сочетались бы высокая производительность автоматических линий с требованиями гибкости производственного процесса. Современные микроэлектроника и ЭВМ позволяют достичь высшего уровня автоматизации.   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|




 - или
- или  -излучений, проходящих через испытуемый материал, нейтронный метод, при котором подсчитывают число медленных нейтронов, образующихся в результате их торможения ядрами атомов водорода, входящего в состав воды; электрические методы – кондуктометрический (по величине электрической проводимости материала, зависящей от его влажности), диэлькометрический и микроволновый (по ослаблению мощности излучений сверхвысокой частоты, проходящих через материал).
-излучений, проходящих через испытуемый материал, нейтронный метод, при котором подсчитывают число медленных нейтронов, образующихся в результате их торможения ядрами атомов водорода, входящего в состав воды; электрические методы – кондуктометрический (по величине электрической проводимости материала, зависящей от его влажности), диэлькометрический и микроволновый (по ослаблению мощности излучений сверхвысокой частоты, проходящих через материал).