
|
|
Проецирование пространственного изображения тела на плоскость
Положение точек тела в пространстве определяется массивами трех координат (X, Y, Z). При построении изображения точки тела проецируются на плоскость, например, XoY - плоскость экрана. Координаты проекции точки (Xp, Yp) зависят от значения всех трех координат (X, Y, Z), что создает иллюзию пространственного изображения тела. Поворачивая тело вокруг неподвижной точки можно строить проекции различных положений тела в пространстве на плоскость экрана. Поворот тела вокруг начала системы координат можно представить в виде последовательного поворота вокруг каждой из осей, так как при этом расстояние от точки до начала координат не меняется. Приведем зависимости координат точки при повороте тела вокруг осей координат X, Y, Z. Используется правая система координат.
Z При повороте тела вокруг оси "X" на угол "fix" новые координаты точки (X1,Y1,Z1) находятся по формулам: X1=X; Y1= Y*cos(fix)- Z*sin(fix); Z1= Z*cos(fix)+ Y*sin(fix);
При повороте тела вокруг оси "Y" на угол "fiy" новые координаты точки (X1,Y1,Z1) находятся по формулам:
Y1=Y; X1= X*cos(fiy)+ Z*sin(fiy); Z1= Z*cos(fiy)- X*sin(fiy);
При повороте тела вокруг оси "Z" на угол "fiz" новые координаты точки (X1,Y1,Z1) находятся по формулам:
Z1=Z; X1= X*cos(fiz)- Y*sin(fiz); Y1= Y*cos(fiz)+ X*sin(fiz);
При параллельном переносе тела вдоль осей X, Y, Z на вектор (Wx, Wy, Wz) новые координаты точки (X1, Y1, Z1) находятся по формулам:
X1= X + Wx; Y1= Y + Wy; Z1= Z + Wz;
Некоторые виды поверхностей образуются следом линии (образующей) движущейся в пространстве по заданному закону. Например, поверхности вращения с осью симметрии "Y" получаются при вращении образующей вокруг оси "Y". Некоторые поверхности можно получить перемещением образующей вдоль другой линии (направляющей). Если через определенные моменты времени фиксировать "M" раз положение образующей и рисовать след "N" точек на образующей, то получим сетчатую поверхность, задаваемую в пространстве положением "N*M" точек (узлов). Приведем пример операторов для построения сетчатой поверхности (цилиндра), полученной при вращении образующей (прямой линии, лежащей в плоскости XoY) вокруг оси "Y".
Пусть "i" - число точек на образующей i=1, 2, 3,.., N, а "j" - число точек, зафиксированных на ее следе j=1, 2, 3,.., M. Определим координаты точек образующей: for i:= 1 to N do begin x[i]:= R; y[i]:=y0+h*i; z[i]:= 0 end; Здесь R - радиус цилиндра, h - шаг сетки по оси "Y",. y0 - координата по оси "Y" первой точки образующей. Определим координаты массивов Xf, Yf, Zf узлов сетчатой поверхности:
for j:= 1 to M do begin fiy:=2*Pi*(j-1)/(M-1); for i:= 1 to N do begin Yf[i,j]:= Y[i]; Xf[i,j]:= X[i]*cos(fiy); Zf[i,j]:= -X[i]*sin(fiy); end; end; Здесь fiy - угол поворота образующей вокруг оси "Y" при задании поверхности. Для обзора поверхности определим проекции узлов на плоскость экрана при заданных углах поворота поверхности вокруг осей координат:
fix:=pi/12; fiz:=pi/16; fiy:=Pi/12; for j:= 1 to M do for i:= 1 to N do begin X1:=Xf[i,j]; Y1:=Yf[i,j]*cos(fix) - Zf[i,j]*sin(fix); Z1:=Zf[i,j]*cos(fix) + Yf[i,j]*sin(fix); Y2:= Y1; X2:= X1*cos(fiy) + Z1*sin(fiy); Z2:= Z1*cos(fiy) - X1*sin(fiy); Xp[i,j]:= X2*cos(fiz) - Y2*sin(fiz); Yp[i,j]:= Y2*cos(fiz) + X2*sin(fiz); end; Построим сетчатую поверхность: for j:= 1 to M-1 do begin moveto_g(Xp[1, j], Yp[1, j]); for i:= 1 to N do begin {setlinestyle(0,0,3); ch:=readkey; if ch='n' then setlinestyle(1,0,1);} lineto_g(Xp[i,j], Yp[i,j]); line_g(Xp[i,j], Yp[i,j], Xp[i,j+1], Yp[i,j+1]); end; end; Здесь операторы в скобках { } помогут Вам построить невидимые линии при нажатии клавиши n, для построении видимых линий следует держать нажатой любую клавишу.
Практическое задание N 2. 10
1. Построить проекцию поверхности, полученной вращением вокруг оси "Y" образующей: 1. 1 Конуса: xi=x0+h*i; yi=a*xi; zi:=0; a- тангенс угла наклона образующей. 1. 2 Параболоида вращения: xi= x0+h*(i-1); yi=A*xi2 + y0; zi= 0; 1. 3 Однополостного гиперболоида: xi=R+h*(i-1); yi= A* Ö ((xi/R)2 -1); zi= 0; 1. 4 Двухполостного гиперболоида: xi= h*(i-1); yi= ± A* Ö ((xi/R)2 +1); zi= 0; 1. 5 Эллипсоида: ti=Pi*(i-1)/(n-1); xi=A*sin(ti); yi=B*cos(ti); zi=0; 1. 6 Тора: ti=2*Pi*(i-1)/(n-1); xi=A+C*cos(ti); yi=B*sin(ti); zi=0; (A>C). 2. Построить проекцию поверхности, полученной перемещением вдоль оси "Y" образующей: 2. 1 Параболического цилиндра: xi=A*h*(i-n/2); yi=0; zi=xi2 /B-C; 2. 2 Гиперболического цилиндра: xi=A*h*(i-n/2); yi=0; zi= ± B* Ö ((xi/R)2 +1);
Некоторые задачи физики Механика
Статика. Практически все задачи статики сводятся к определению сил, действующих на неподвижное или движущееся прямолинейно и равномерно тело. При этом решаются уравнения равенства нулю суммы проекций всех сил F1, F2, F3,..., FN на оси координат или строится замкнутый многоугольник сил. Для построения многоугольника "N" сил необходимо выбрать некоторую точку (например, начало координат), провести из нее вектор первой силы, из конца первого вектора провести вектор второй силы и т. д. Если многоугольник будет замкнутый (конец "N" -го вектора совпадает с началом первого), то тело под действием данных сил будет находиться в равновесии. Рассмотрим задачу графического построения многоугольника сил в плоском (двумерном) случае. Если силы, действующие на тело заданы проекциями на оси координат Fx1, Fx2,.., FxN, и Fy1, Fy2,.., FyN, то конец первого вектора имеет координаты: x1=Fx1, y1=Fy1, конец второго вектора имеет координаты: x2=x1+Fx2, y2=y1+Fy2 и т. д. Условие равновесия тела: xN= FxR = åFxi = 0, yN= FxR = åFyi = 0 (здесь полагается, что первый вектор проводится из начала координат). Если условие равновесия не соблюдается, то проекции уравновешивающей силы определяются по формулам: FxR =xN, FyR=yN. Приведем процедуру рисования вектора, заданного координатами точек начала "1" и конца "2".
Procedure Vector_G(x1, y1, x2, y2: double); Var x3, y3, L, Lc, sa, ca, s3, c3: double; Begin L:= sqrt(sqr(x1-x2) + sqr(y1-y2)); { длина вектора } Lc:= L/5.; { длина стрелок } ca:=(x2-x1)/L; sa:=(y2-y1)/L; c3:=cos(Pi/10); 3:=sin(Pi/10); { Pi/10 - угол наклона стрелок к линии вектора} Line_G(x1, y1, x2, y2); x3:= x2 - Lc*(ca*c3-sa*s3); {основная линия} y3:= y2 - Lc*(sa*c3+ca*s3); Line_G(x2, y2, x3, y3); x3:= x2 - Lc*(ca*c3+sa*s3); { линия стрелки} y3:= y2 - Lc*(sa*c3-ca*s3); Line_G(x2, y2, x3, y3) End; { линия стрелки} Практическое задание N 2. 11
Построить оси координат с началом в середине экрана и многоугольник сил, действующих на тело. Определить величину уравновешивающей силы и вывести на экран ее значение. Построить вектор уравновешивающей силы другим цветом. Силы заданы проекциями на оси координат:
2 8 4 7 -9 -10 -7 11 8 20 -14 F4 3 11 24 -32 26 -16 -21 -23 15 17 25 F5
Кинематика. В кинематике изучается движение тела (точки) без анализа причин (сил), вызывающих это движение. Основной задачей является построение траектории точки, а также определение скорости и ускорения точки в любой момент движения. Траекторией точки называется линия, описываемая точкой, движущейся в пространстве. Движение точки определяется уравнением (законом) движения, в котором устанавливается зависимость положения точки в пространстве от времени. В параметрической форме траектория точки описывается зависимостями: X=X(t), Y=Y(t). Вектор скорости направлен по касательной к траектории движения точки. Проекции скорости на оси координат равны: Vx = dX/dt; Vy = dY/dt; Проекции ускорения на оси координат равны: Ax = dVx/dt; Ay = dVy/dt;
Рассмотрим уравнения, описывающие движение точки в некоторых случаях. Для точки, начинающей движение в некоторый момент времени "t0" (полагается t0=0) под углом "fi" к горизонту со скоростью "V0" уравнения движения без учета сопротивления воздуха имеют вид:
X = V0*t*cos(fi); Y = V0*t*sin(fi) - 0. 5*g*t2;
Для точки, начинающей движение под углом "fi" к горизонту со скоростью "V0" траектория движения с учетом сопротивления воздуха пропорционального скорости точки имеет вид:
X = V0*cos(fi)*Fc(t); Y = (V0*sin(fi) + g/kc)*Fc(t) - g*t/kc;
где Fc(t) = (1-e(-kc*t))/kc; kc - коэффициент сопротивления. g = 9. 81, м/с - ускорение свободного падения.
Для точки, движущейся над горизонтальной поверхностью расчетную область можно ограничить: X_max=V02 /g; Y_max=0.5*X_max. Время движения tp=2*V0*sin(fi)/g.
Практическое задание N 2. 12
1. Построить траекторию движения точки без учета и с учетом сопротивления воздуха при начальных условиях: fi=450, V=1000, м/с, k=0. 01. Через равные интервалы времени выводить на графике вектор скорости и ускорения точки, умноженные на масштабные коэффициенты: KV=10; KA=1000. Построить траектории движения массива точек, моделирующих: а) фонтан, б) фейерверк. 2. Рассчитать процесс поражения воздушной цели, движущейся по траектории: Xs = X1 - Vs*t; Ys = Y1; снарядом, летящим со скоростью Vc по траектории: Xc = Vc*t*cos(fi); Yc = Vc*t*sin(fi); В случае поражения цели в некоторый момент времени tp: Xs=Xc; Ys=Yc; Решая эти уравнения, получаем:
sin(fi)= (W*Z + Ö (1+Z2-W2)) / (1+Z2); cos(fi)= Ö (1-sin2 (fi));
где Z=X1/Y1; W=Vs/Vc; tp=Y1/(Vc*sin(fi)); Условие поражения цели: Vc > Vs*sin(fi). Зададим X1=3000, Y1=10000, Vc=2000, Vs=900;
3. Рассчитать процесс поражения неподвижной цели с координатами (Xs, Ys) снарядом, летящим по траектории: Xc= Vc*t*cos(fi); Yc = Vc*t*sin(fi) - 0. 5*g*t2; В случае поражения цели в момент времени tp: Xs=Xc; Ys=Yc; Решая эти уравнения, получаем: cos(fi)= Xs/L* Ö (W ± Ö (W2 - Z2 ))/2); sin(fi)= Ö(1-cos2 (fi));
где L2= Xs2 + Ys2; W= 1-Ys*g/ Vc2; Z=g*L/Vc2; tp= Xs/(Vc*cos(fi)); Условие поражения цели: Vc2 > g*(L+Ys). Зададим Xs=15000, Ys=100, Vc=500,
4.Рассчитать процесс поражения неподвижной цели с координатами (Xs,0) бомбой, сброшенной с самолета и летящей по траектории: Xc = X0 +Vc*t; Yc = H - 0. 5*g*t2; В случае поражения цели в момент времени tp: Xs=Xc; Ys=Yc; Решая эти уравнения, получаем:
H = 0. 5*g*L2 / Vc2 + Ys; L = Xs - X0.
где H - высота на которой должен лететь самолет, чтобы сбросить бомбу не долетая до цели расстояния "L". tp=L/Vc; Зададим X0=150; Xs=80000; Ys=500; Vc=850;
Примечание к п. п. 2-4: Выводить на экран координаты цели и снаряда.
Движение спутника вокруг планеты описывается в полярной системе координат уравнением:
r = p/(1 + e*cos(fi));
где r - расстояние от спутника до центра планеты, fi - угловая координата, p = (R0*V0/Rz)2/g - параметр эллипса, e = p/R0-1 - эксцентриситет эллипса, |e|<1 - эллипс, |e|=1 - парабола, |e|>1 - гипербола. R0 - начальное расстояние от спутника до центра планеты, Rz - радиус планеты, g - ускорение свободного падения при r=Rz, V0 - начальная скорость спутника при r=R0.
Практическое задание N 2. 13
1. Построить траекторию движения спутника при R0=2*Rz, изменяя "e": 0 <e< 1 с шагом 0. 25, (0 <=fi<= 2*Pi). Rz=6370000, м, g=9. 81, м/с2 2. Построить траекторию движения спутника при R0=Rz изменяя "e": 1 <=e<= 2 с шагом 0. 25, (-0. 85*Pi/ Ö e <=fi<= 0. 85*Pi/ Ö e. Примечание к п. п. 1, 2: вывести на экран начальную скорость спутника V0 и сравнить с первой космической W1=Rz* Ö(g/R0); и со второй космической W2=W1*Ö2.
Рассмотрим уравнения, описывающие прямолинейные колебания точки около неподвижного центра. Свободные колебания точки происходящие под действием сил упругости без учета сопротивления среды называются гармоническими и описываются уравнением:
/ 0 /
где X - координата точки, отсчитываемая от положения равновесия, A - амплитуда, k - круговая частота, fi - начальная фаза колебаний. t - параметр времени. Период колебаний tn = 2*Pi/k;
A = Ö(X02 + V02/k2); tg(fi) = k*X0/V0; k = Ö(C/M)
где X0, V0 - начальные координаты и скорость точки при t=0, C - жесткость пружины, M - масса точки.
В случае действия небольшой силы сопротивления, пропорциональной скорости движения точки, колебания называются затухающими и описываются уравнением:
X = A1 * e(-n*t) * sin(k1*t + fi1); при n < k;
где A1 = Ö(X02 + ((V0+n*X0)/k1)2); tg(fi1) = k1*X0/(V0+n*X0); k1 = Ö(k2 -n2); n=0.5*kc/M; kc - коэффициент сопротивления среды.
В случае действия на точку, совершающую колебания без сил сопротивления, гармонической возмущающей силы "F" с круговой частотой "p" колебания точки описываются уравнением:
X = A * sin(k*t+fi) + h/(k2-p2) * sin(p*t); при p<>k.
При p=k (явление резонанса) уравнение движения точки имеет вид:
X = A * sin(k*t+fi) - h*t/(2*k) * cos(k*t); при p=k.
В случае действия на точку, совершающую колебания, сил сопротивления и гармонической возмущающей силы с круговой частотой "p" колебания точки описываются уравнением:
X = A1 * e(-n*t) * sin(k1*t+fi1) + B1 * sin(p*t+u);
где B1 = h/Ö(k14 + 4*n2*p2); tg(u) = -2*n*p/k12; h=F/M; Практическое задание N 2. 14
1. Построить зависимость изменения от времени "t" координаты "X" точки массой M=1, кг, колеблющейся на пружине жесткостью C=10, н/м, с начальными условиями X0:=-0. 5, м; V0:=10, м/с; в случае:
1_1. Свободных колебаний точки без учета сил сопротивления, при различной жесткости пружины: C=10, н/м, C=5, н/м. 1_2. Свободных колебаний точки с учетом малой силы сопротивления, при различном сопротивлении среды: kc=0. 01; kc=0. 1; kc=1; 1_3. Вынужденных колебаний точки без учета сил сопротивления, при h=25, н/кг и различной частоте в случаях: p=0. 85*k; p=0. 5*k; p=0. 05*k; В случае p=k при h=1, н/кг; h=2, н/кг; h=3, н/кг; 1_4. Вынужденных колебаний точки с учетом силы сопротивления kc=0. 1, при h=25, н/кг и различной частоте p=0. 5*k; p=k; p=5*k;
X = A*sin(k1*t+fi1) + B*sin(k2*t+fi2);
Здесь A, B - амплитуды, k1, k2 - круговые частоты, fi1, fi2 - начальные фазы колебаний точки. В случае примерного равенства амплитуд (A и В) и частот (k1 и k2), т. е. при значениях |k1 - k2| << k1 результирующее колебание можно рассматривать как гармоническое с переменной амплитудой и начальной фазой колебаний. Такой вид колебаний называется биениями. Частота биений равна "k1", а частота изменения амплитуды равна "|k1-k2|".
В случае свободных прямолинейных колебаний точки, происходящем в двух взаимно перпендикулярных плоскостях, уравнения движения точки имеют вид:
X = A*sin(k1*t+fi1); Y = B*sin(k2*t+fi2);
Траектория движения точки зависит от соотношения амплитуд, частот и начальных фаз колебаний. Рассмотрим различные случаи.
Случай k1 = k2. В зависимости от разности начальных фаз dFi = | fi2-fi1 | получаем, при dFi=0, Pi, 2*Pi,... - колебания вдоль прямой, при dFi=Pi/2, 3*Pi/2, 5*Pi/2,... - колебания по эллиптической траектории (а при A=B - по окружности). Случай k1 <> k2. При dFi = Pi /2 в зависимости от соотношения частот, получаем: при k1 = 2*k2 - колебания по параболической траектории, при k1 = p*k, k2 = q*k, (p и q - натуральные числа) - колебания по траекториям Лиссажу. Причем, при p - нечетных, а q - четных получаем незамкнутые кривые. При dFi не кратном Pi/2 получаются разнообразные кривые.
Практическое задание N 2. 15
1. Построить зависимость изменения координаты точки "X" от времени "t", при следующих значениях амплитуды: A = B = 10 (в случае биений) и A = 5, B = 15. Круговые частоты k1=10, k2=11, начальные фазы колебаний равны нулю. Параметр "t" изменять от нуля до 4*Pi / |k1-k2|. 2. Построить зависимость изменения координат точки "X" и "Y" от времени "t" в случае взаимно перпендикулярных колебаний, для различных случаев: 1) k1=k2=k, fi1=0, fi2=Pi/2; 2) k1=k*(1+0. 1*t), k2=k, dFi=0; 3) k1=2*k, k2=3*k, dFi=Pi/2; 4) k1=k, k2=2*k, dFi=Pi/2; Значения амплитуд: A = 10, B = 20, круговая частота: k=100. Параметр "t" изменять от нуля с шагом 0. 01*Pi/k до нажатия клавиши Enter.
Свободное движение точки (тела) часто можно представить в виде составного, полученного сложением нескольких движений. Например, пловец, переплывающий реку плывет прямо к противоположному берегу, а течение реки сносит его. Таким образом, абсолютное движение пловца относительно неподвижной системы отсчета состоит из движения вдоль и поперек реки. Пусть пловец движется со скоростью "V1", а скорость течения "Vp", тогда вектор абсолютной скорости V=V1+Vp. Направим ось "X" - вдоль реки (по течению), а ось "Y" - поперек реки. Проекции абсолютной скорости на оси координат: Vx=Vp, Vy=V1. Пусть скорость течения реки постоянна, а пловец плывет с постоянным ускорением "A1", тогда траектория пловца имеет вид:
где A1 = (V2-V1)/tn; - ускорение пловца, tn= 2*H/(V2+V1); - время движения пловца,
t - параметр времени.
Практическое задание N 2. 16
1. Построить траектории движения десяти пловцов, заканчивающих движение со скоростью V2 = V1 / N, где N - номер пловца. Ширина реки H=1000, м, скорость V1=2, м/с, Vp=1, м/с. 2. Построить траектории движения спортсмена, прыгающего вертикально со скакалкой в поезде. Скорость движения поезда прямолинейна и постоянна Vp=20, м/с. Спортсмен отрывается от пола со скоростью V1=5,м/с и до касания движется по закону: Y= V1*t - 0. 5*g*t2. Движения повторяются 10 раз с периодом t = 2*V1/g, где g=9. 81, м/с2. 3. Построить траектории движения шести точек на колесе радиусом R=0. 5, м, катящемся по горизонтальной плоскости с постоянной скоростью V=0. 2, м/с. Траектория точки описывается уравнениями: X = V*t - R1*sin(fi); Y = -R1*cos(fi);
где R1= R +(N-3)*R/2 - радиус N -ой точки, N=1,..., 6; fi= V*t/R, t - время движения 0<=t<=3*(2*Pi*R/V).
Динамика. В задачах динамики рассматривается движение тел под действием сил. Для определения характеристик движения (траектории, скорости и т. д.) составляются дифференциальные уравнения движения, которые затем интегрируются, а также используются законы сохранения энергии или импульса. Рассмотрим задачу столкновения двух шаров, движущихся со скоростью V1 и V2. Если центры масс соударяющихся тел находятся на общей нормали, проведенной в точку контакта, то удар называется центральным. Например, удар при столкновении двух шаров. При центральном ударе двух тел с идеально гладкой поверхностью справедлива гипотеза Ньютона: проекция скорости на нормаль к поверхности в точке контакта уменьшается после удара в "k" раз. Коэффициент восстановления "k" характеризует потери энергии на тепло при ударе и зависит от материала тел. Используя также закон сохранения импульса, получаем формулу расчета векторов скорости шаров W1 и W2 после удара:
W1 = V1 + M2*(1+k)/(M1+M2)*(|V1|*cos(fi1) + |V2|*cos(fi2))*n1; W2 = V2 + M1*(1+k)/(M1+M2)*(|V1|*cos(fi1) + |V2|*cos(fi2))*n2;
Здесь fi1 и fi2 - углы между линией общей нормали и векторами скоростей V1 и V2 в момент удара. n1 и n2 - векторы единичных нормалей к поверхности шаров в точке контакта. |V1| и |V2| - модули векторов скоростей V1 и V2. Рассмотрим случай построения плоской траектории при столкновении шара "1", движущегося со скоростью "V1" с неподвижным шаром "2". В проекциях на оси скорость первого шара равна:
W1x = V1x + M2*(1+k)/(M1+M2)*|V1|*cos(fi1)*n1x; W1y = V1y + M2*(1+k)/(M1+M2)*|V1|*cos(fi1)*n1y;
причем n2x=cos(-fi1); n2y=sin(-fi1); n2
Практическое задание N 2. 17 X
1. Пренебрегая размерами шаров построить траектории движения двух шаров до и после столкновения. Первый шар движется по горизонтали со скоростью |V1|=10, м/с, а второй неподвижен (в центре экрана). Массы шаров равны: M1 = 0. 1, M2 = 0. 1. Угол fi1 менять по зависимости: fi1 = Pi*(5-i)/10, i=1, 2,..., 9. Коэффициент восстановления k=0, 55 - для стальных шаров, k=0, 89 - для шаров из слоновой кости.
Многие задачи динамики связаны с расчетом длины пути "L", например, при определении работы сил трения "At":
At = ò Kt*N*dL = Kt*N*L; (L) Здесь Kt - коэффициент трения скольжения, N - нормальная реакция поверхности (полагается постоянной).
Длина дуги плоской линии находится по формуле: t1 B L= òÖ((dx/dt)2 + (dy/dt)2)dt; или L= òÖ(1 + (dy/dx)2)dx; t2 A
Здесь t - параметр, при задании вида кривой в параметрической форме.
1. Определить, длину пути точки, движущейся в горизонтальной плоскости X0Y по траектории: 1) Эллипс y= YL*sin(t); x= XL*(1+ cos(t))/2; 0<=t<=Pi; 2) Парабола y=4*YL*x*(XL-x)/XL2; 0<=x<=XL; 0<=y<=YL; 4) Синусоида y=YL*sin(Pi*x/XL); 0<=x<=XL; 0<=y<=YL; 0 XL X Расчет интеграла провести двумя численными методами, например, с использованием квадратурных формул Гаусса и по формуле Симпсона, для YL=10; XL=15; Построить все траектории движения точки.
Оптика и свет
Геометрическая оптика. Задачи оптики связаны с графическими построениями падающих, преломленных и отраженных лучей. Рассмотрим задачу построения траектории преломленных и отраженных лучей при прохождении границы раздела двух прозрачных сред. Углом падения называют угол, образованный лучом и нормалью к поверхности в точке падения. Согласно закону отражения света угол падения луча равен углу отражения. Углом преломления называют угол, образованный лучом, прошедшим через границу раздела двух сред, и нормалью к поверхности в точке падения. Согласно закону преломления света проходящего из среды с показателем преломления n1 в среду с показателем преломления n2 зависимость между углом падения fi1 и углом преломления fi2 имеет вид:
sin(fi2)/sin(fi1)=n1/n2.
Пусть источник света расположен в среде с n1>n2, а граница раздела сред проходит по оси "Х". Алгоритм построения траектории луча следующий: 1) Задаем координаты и угол выхода луча x0, y0, fi1. Вычисляем fip с использованием формулы: arcsin(x)=arctg(x/Ö(1-x2)).
2) Определяем проекции падающего луча: fx1=abs(y0)*tg(fi1); fy1=abs(y0); и строим вектор из т. (x0, y0) в т. (x1=x0+fx1, y1=0). 3) Если fi1<fip, то вычисляем угол преломления fi2, проекции преломленного луча: fx2=abs(y0)*tg(fi2); fy2=abs(y0); и строим вектор из т. (x1, y1) в т. (x2=x1 + fx2, y2=fy2). 4) Определяем проекции отраженного луча: fx3=abs(y0)*tg(fi1); fy3=-abs(y0); и строим вектор из т. (x1, y1) в т. (x3=x1+fx3, y3=fy3).
0 X Луч, выходящий из источника света под углом "al1" к оси "Х" падает на первую грань призмы под углом "fi1". Преломленный луч падает на вторую грань призмы под углом "fi3" и выходит под углом "al4" к оси "Х". Алгоритм построения луча, проходящего через призму: 1) Строим призму при заданных углах "fp1", "fp2" и высоте "h" треугольника, 2) Определяем точку "2": y2=K*h; x2= K*a1; где 0<K<1; a1=h/tg(fp1); 3) Определяем точку "1": x1=x2-L*cos(al1); y1= y2-L*sin(al1); из которой в точку “2” проводим вектор заданной длины "L" под заданным углом al1. 4) Определяем угол падения луча: fi1=Pi/2+al1-fp1; угол преломления луча: fi2:=arcsin(sin(fi1)*n1/n2) и угол наклона луча к оси "Х": al2=al1+fi2-fi1. 5) Решая совместно уравнение для луча и стороны треугольника, определяем точку "3": x3= (x2*tg(al2)+a*tg(fp2)-y2)/(tg(al2)+tg(fp2)); y3:= (a-x3)*tg(fp2); где a= a1+a2; a2=h/tg(fp2); к которой проводим из т. "2" вектор. 6) Определяем угол падения луча: fi3= Pi/2-al2-fp2; угол преломления луча: fi4:=arcsin(sin(fi3)*n2/n1) и угол наклона луча к оси "Х": al4=al2+fi3-fi4. 7) Строим луч, выходящий из т. "3" в т. "4": x4=x3+L*cos(al4); y4=y3+L*sin(al4).
Рассмотрим задачу построения траектории лучей при отражении от параболического зеркала. Парабола описывается уравнением Y2 = 2*P*X, где X - ось параболы. Фокус   Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 Y Y
Y Y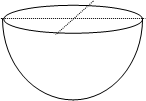









 *
*







 X
X



 Z X
Z X










 Y F1 F2
Y F1 F2
 N Fx1 Fx2 Fx3 Fx4 Fx5 Fy1 Fy2 Fy3 Fy4 Fy5
N Fx1 Fx2 Fx3 Fx4 Fx5 Fy1 Fy2 Fy3 Fy4 Fy5



 1 5 7 -4 -3 -5 4 -7 -6 5 4 F3
1 5 7 -4 -3 -5 4 -7 -6 5 4 F3 4 21 15 18 -9 -24 -11 18 -17 14 -14 0 x5 x1 x4 x2 x3 X
4 21 15 18 -9 -24 -11 18 -17 14 -14 0 x5 x1 x4 x2 x3 X Y
Y

 V
V

 Y Vs
Y Vs


 * 1
Vc
* 1
Vc

 fi
X
fi
X
 Y
Y


 Vc
Vc
 fi * (Xs,Ys)
fi * (Xs,Ys)
 X
X
 Y
Y

 * Vc
(X0, H)
* (Xs, Ys)
* Vc
(X0, H)
* (Xs, Ys)
 X
X
 Y
Y
 V
V


 r
r





 /
/




 В случае свободных прямолинейных колебаний точки, центр крепления которой движется по аналогичному гармоническому закону вдоль той же линии, уравнение движения точки имеет вид:
В случае свободных прямолинейных колебаний точки, центр крепления которой движется по аналогичному гармоническому закону вдоль той же линии, уравнение движения точки имеет вид:

 |/\/\/\/\/\/\/\|
|/\/\/\/\/\/\/\|
 k2 k1
k2 k1


 X = Vp*t; Y = V1*t + 0.5*A1*t2; Y V1 V
X = Vp*t; Y = V1*t + 0.5*A1*t2; Y V1 V V1, V2 - начальная и конечная скорости пловца, V2
V1, V2 - начальная и конечная скорости пловца, V2 X
X
 n1
n1
 где n1x=cos(-fi1+Pi); n1y=sin(-fi1+Pi); Y
где n1x=cos(-fi1+Pi); n1y=sin(-fi1+Pi); Y
 1
1
 Аналогичный вид имеет формула для W2x и W2y, V1
Аналогичный вид имеет формула для W2x и W2y, V1 Практическое задание N 2. 18 Y
Практическое задание N 2. 18 Y

 YL
YL 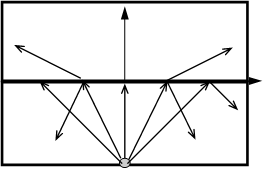

 fi2
fi2 X
X В случае расположения источника в более плотной среде n1>n2, при угле падения луча большем, чем fip=arcsin(n2/n1) происходит полное отражение луча. В случае расположения источника в менее плотной среде n1<n2 существует оптимальный угол падения луча fio=arctg(n1/n2) при котором потери отраженной и поглощенной энергии наименьшие.
В случае расположения источника в более плотной среде n1>n2, при угле падения луча большем, чем fip=arcsin(n2/n1) происходит полное отражение луча. В случае расположения источника в менее плотной среде n1<n2 существует оптимальный угол падения луча fio=arctg(n1/n2) при котором потери отраженной и поглощенной энергии наименьшие.

 Рассмотрим задачу построения траекторий преломленных лучей, проходящих через прозрачную трехгранную призму. Известно, что луч белого цвета разлагается на составляющие цвета из-за разности коэффициента преломления для монохромных лучей, поскольку длина волны зависит от плотности среды.
Рассмотрим задачу построения траекторий преломленных лучей, проходящих через прозрачную трехгранную призму. Известно, что луч белого цвета разлагается на составляющие цвета из-за разности коэффициента преломления для монохромных лучей, поскольку длина волны зависит от плотности среды.


 Например, для стекла - тяжелый флинт: Y 4
Например, для стекла - тяжелый флинт: Y 4




 2
2










 3
3 Цвет Красный Желтый Зеленый Синий Фиолетовый
Цвет Красный Желтый Зеленый Синий Фиолетовый

 "n2" 1, 644 1, 650 1, 66 1, 68 1, 685 1 n1
"n2" 1, 644 1, 650 1, 66 1, 68 1, 685 1 n1

 n2
n2 
