
|
|
Расчёт регулировочных резисторов в цепи якоря двигателяРасчёт ведут на основе известной механической характеристики двигателя и его паспортных данных. При этом используется метод пропорций или метод отрезков. Обратимся к нарисованному нами семейству механических характеристик двигателя при изменении сопротивлений в цепи якоря (рис. 4.4). При условии, что характеристики линейны, попытаемся определить величину Очевидно, что:
где Необходимо в данном случае знать сопротивление якоря. Его можно найти в каталоге, либо непосредственным измерением. Если же ни то ни другое невозможно, для определения сопротивления
где
Регулирование тока и момента при торможении и реверсе двигателя
В большинстве случаев регулирование тока и момента двигателя сводится к их ограничению. Для этого в цепь якоря вводится регулируемый резистор (рис. 4.1). Учитывая особенности пуска ДПТ НВ (большой пусковой ток и момент), в цепь якоря вводят регулировочный резистор на момент пуска (пусковой резистор) для ограничения пускового тока и момента. В результате пуск двигателя осуществляется по характеристике (1) (рис. 4.8), которая проходит через точку ω 0 и
Рис. 4.8. Механические характеристики ДПТ НВ
После того, как двигатель разогнался до некоторой скорости ω 1, пусковой резистор шунтируют и двигатель переходит на работу по естественной характеристике (2) Rд =0. При шунтировании пускового резистора происходит скачок тока и момента, который не должен превышать Сопротивления резисторов, позволяющие получить необходимые характеристики, рассчитывают по формуле (4.1), так для случая пуска при
Важную роль в работе привода играют процессы торможения, которые определяются требованиями технологического процесса рабочей машины. Обычно используют два способа торможения: динамическое и противовключением. При динамическом торможении (характеристика 4 рис. 4.8) якорь отключается от сети и замыкается на тормозное сопротивление. Двигатель работает в режиме автономного генератора (рис 4.3) и тормозится до нулевой скорости. Недостатком является то, что тормозной момент двигателя также уменьшается до нуля. Для ограничения тормозного тока в цепь якоря включают тормозной резистор:
При торможении двигателя противовключением меняют полярность напряжения на якоре или на обмотке возбуждения. Двигатель переходит на работу по характеристике 5 (рис. 4.8) и работает генератором, включенным последовательно с сетью. Учитывая то, что в этом случае ЭДС меняет знак, имеем очень большие тормозные токи, и в цепь якоря приходится вводить большое сопротивление для ограничения тока:
Регулирование скорости двигателя изменением Магнитного потока
Скорость двигателя зависит от магнитного потока, причем с увеличением магнитного потока она уменьшается (см. уравнение (4.4)). Следовательно, изменяя ток в цепи возбуждения, изменяем магнитный поток и скорость двигателя [1; 9]. Поскольку электрическая машина рассчитывается на продолжительную работу с номинальной нагрузкой, стремятся оптимально использовать железо машины. Для этой цели рабочая точка обычно выбирается на колене кривой намагничивания (рис. 4.10). Такой выбор рабочей точки ограничивает возможности регулирования скорости двигателя за счет увеличения тока возбуждения. На практике используют только регулирование за счет уменьшения магнитного потока вниз от номинального. В результате скорость регулируется вверх от номинальной. Диапазон регулирования равен 2 (редко 3). Регулирование плавное, с увеличением скорости жесткость характеристик снижается.
Рис. 4.9. Схема управления током возбуждения ДПТ НВ
Рис. 4.10. Кривая намагничивания
Достоинством этого способа является то, что управление двигателем осуществляется за счет изменения сопротивления в слаботочной цепи (рис. 4.9) и, следовательно, потери при регулировании в этом случае минимальны. Электромеханические характеристики (рис. 4.11) двигателя имеют общую точку, соответствующую Iкз
Рис. 4.11. Электромеханическая характеристика ДПТ НВ
Механические характеристики показаны на рис. 4.12. Очевидно, что Мкз = kФIкз – зависит от Ф и снижается с его уменьшением.
Рис. 4.12. Механическая характеристика ДПТ НВ
Определяем допустимую нагрузку на искусственных характеристиках. Полагая в уравнении 4.3 I=Iн, получим
где В нашем случае Фи<Фн
Учитывая, что напряжение, ток и сопротивление якоря постоянны Ее=Еи, следовательно:
где В результате:
При этом способе регулирования мы максимально используем двигатель (не перегружая его) при постоянной мощности нагрузки. Такой способ регулирования в практике ЭП получил название «регулирование с постоянной мощностью». Этот способ регулирования используется в замкнутых системах привода для расширения диапазона регулирования за счет второй зоны. В первой зоне регулирование обычно осуществляется за счет изменения напряжения на якоре (основная зона), а во второй за счет изменения магнитного потока. Использование двухзонного регулирования позволяет в два-три раза увеличить диапазон регулирования. В простейшем случае регулирование осуществляется за счет изменения регулировочного сопротивления в цепи обмотки возбуждения (рис. 4.9). Величину этого регулировочного сопротивления Rp 1 можно найти определив магнитный поток Ф1. Магнитный поток
где Величину Iв1* находят по кривой намагничивания (рис. 4.10), предварительно определив соответствующее значение Ф1*. После этого находят ток возбуждения
  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 , необходимого для получения искусственной характеристики [9].
, необходимого для получения искусственной характеристики [9]. ,
, , (4.9)
, (4.9) - сопротивление якоря, соответствующее естественной характеристике.
- сопротивление якоря, соответствующее естественной характеристике. используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря.
используем приближенную формулу. Сопротивление якоря находят из предположения, что половина всех потерь в двигателе приходится на долю якоря. , (4.10)
, (4.10) - условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
- условное сопротивление, которое нужно включить в якорную цепь, чтобы при неподвижном якоре получить номинальный ток.
 . Значения
. Значения  заданы условиями пуска и определяют своей величиной пусковой резистор [9].
заданы условиями пуска и определяют своей величиной пусковой резистор [9].
 2,5)Iн, а I2 обычно берут (1,1
2,5)Iн, а I2 обычно берут (1,1  - характеристика рабочей машины. В большинстве случаев для более плавного пуска пусковой реостат имеет несколько ступеней, которые последовательно закорачиваются, за счет этого можно ограничить колебания тока и момента.
- характеристика рабочей машины. В большинстве случаев для более плавного пуска пусковой реостат имеет несколько ступеней, которые последовательно закорачиваются, за счет этого можно ограничить колебания тока и момента. ,
, 
 будем иметь
будем иметь .
. .
. .
.

 , так как Iкз от магнитного потока Ф не зависит.
, так как Iкз от магнитного потока Ф не зависит.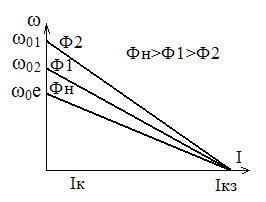

 ,
, - поток на искусственной характеристике.
- поток на искусственной характеристике. Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках:
Мдоп<Мн, то есть ДПТ по условиям нагрева не может быть нагружен на искусственных характеристиках номинальным моментом. Определим, при каких условиях машина используется наиболее эффективно на регулировочных характеристиках. Для этого запишем ЭДС якоря на естественной и искусственной характеристиках: ,
, .
. ,
, - скорость на искусственной характеристике при номинальном токе.
- скорость на искусственной характеристике при номинальном токе. .
. , при котором механическая характеристика проходит через точку с координатой (
, при котором механическая характеристика проходит через точку с координатой ( ) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*.
) (рис. 4.12) при U=Uн; Rд=0, определяется при решении уравнения механической характеристики относительно Ф1*. , (4.11)
, (4.11) ;
;  ;
;  .
. и определяют
и определяют  (рис. 4.9).
(рис. 4.9). . (4.12)
. (4.12)