|
|
Принцип действия и структура авторулевого.Принцип действия и структурная схема индукционного лага. Погрешности лага и их устранение. Принцип действия ИЛ основан на законе электромагнитной индукции. Датчиком сигнала, пропорционального скорости судна, является индукционный преобразователь (ИП). При движении судна поток морской воды обтекает торцевую поверхность корпуса ИП. На этой поверхности расположены 2 электрода. Линия, соединяющая электроды, перпендикулярна ДП судна. Расстояние между электродами обозначено b. Внутри корпуса ИП имеется вертикальный электромагнит, обмотка которого питается переменным током. Электромагнит создает магнитное поле с индукцией B, которое перемещается вместе с судном относительно воды. Морская вода является проводником тока, поэтому в ней наводится электродвижущая сила ЭДС: е = - dФ/dt, где Ф –магнитный поток, Ф=BS, здесь S-площадь сечения магнитного потока. Электромагнит питается переменным током, поэтому магнитная индукция: B=Bm*sinωt (ω=2*π*f). Морская вода, находящаяся между электродами, образует проводник длиной b. При движении судна со скоростью V за некоторое время dt этот проводник пройдет путь Vdt, а S магн потока он пересечёт за это время: dS=bVdt. è Uип =-Bm*S*ω*cosωt-Bm*b*V*sinωt. Uип = Uk + Uc Uk -Квадратурная погрешность при преобразовании напряжения Uип отделяется от полезного сигнала и исключается, т.к. она сдвинута по фазе на п\2 по отношению к полезному сигналу. Uc – полезный сигнал, зависящий от скорости судна Точность показаний лага в большой степени зависит от места установки ИП. Это объясняется прежде всего возникновением вблизи поверхности корпуса движущегося судна турбулентного слоя воды, имеющего неодинаковую толщину случайное поле скоростей частиц жидкости. Кроме того распределение магнитной индукции В в объёме воды неодинаково по длине судна и носит весьма сложный характер. Эти и другие случайные факторы приводят к тому, что измеренная лагом скорость не соответствует истинной скорости судна, причем связь между этими скоростями имеет нелинейный характер.
Типовая схема индукцинного лага
2)подавление помех, сопровождающих сигнал 3)усиление и регулировка опорного сигнала 4)фазовое детектирование двух сигналов 5)выработка дополнительных U необходимых для работы лага ПНВ(преобразователь напряжение-время) предназн. для преобраз. сигнала Uс в прямоугольный импульс с врем. интервалом пропрц. Vc, который осущ. двойным интегрированием с использ. Uоп (сначала интегр отриц Uc, затем полож Uоп- тем самым искл влияние судовой сети ПВЦ(преобразователь время-цифра) -здесь происходит измер длительности импульса(для этого используются счётные импульсы высокой частоты) Аналоговая часть(УП, резисторы для дискретного изменен k усиления, УИК, УОК): 1) усиление и преобразование Uип 2)выработка, усиление и преобразование Uоп УИК: 1) преобраз переменного тока в постоянный методом синхронного детектирования 2)подавление квадратурной помехи УОК: 1)выработка Uоп и создание ПИ, управляющих электронными ключами
Принцип действия и структура авторулевого.
При наличии в комплекте прибора ПУ возможны четыре вида управления: автоматический; следящий; простой и ручной. Автоматический вариант управления обеспечивается сигналом от гирокомпаса или дистанционного магнитного компаса. В этом случае судно удерживается на заданном курсе без участия человека. В следящем режиме курсоуказатель отключается от схемы авторулевого и судном управляет человек с помощью штурвала. При переходе на простой (резервный) вид управления схема авторулевого не используется. Управление рулем производится с помощью двух клавишей, обеспечивающих включение исполнительного механизма рулевой машины. Ручной вид управления является аварийным. Он применяется в случае отказа всей схемы авторулевого. Управление рулем производится вручную посредством рукоятки, находящейся непосредственно на исполнительном механизме.
При автоматическом виде управления в схеме вырабатываются пять сигналов: U1, U2, U3, U4, U5. Сигнал U1= k1α формируется сельсином-трансформатором В3, который механически связан с сельсином приемником курса В2. Связь с гирокомпасом выполнена через контакты переключателя S1. В следящем и простом режимах сельсин приемник В2 от гирокомпаса отключается. Значение сигнала в следящем режиме определяется выражением U1= k1γ, где γ- угол поворота штурвала. Вращение штурвала передается ротору сельсина В3 через механический дифференциал МД. Сигнал U2= k2 α’ создается в блоке коррекции БК путем дифференцирования сигнала U1, который подается на вход блока БК. Сигнал U2 улучшает условия стабилизации судна на заданном курсе, обеспечивая погашение колебаний судна относительно линии заданного курса.
Сигнал U3 вырабатывается в блоке коррекции БК путем интегрирования сигнала U1 т.е. U3 пропорционален интегралу от значения курса по времени. Наличие сигнала U3 позволяет исключить несимметричное рыскание судна, обусловленное различными внешними воздействиями. Этот сигнал обеспечивает дополнительную перекладку руля на постоянный угол, чем компенсируется влияние внешнего несимметричного возмущения. Сигнал U4 = k4β формируется сельсином-трансформатором В6, находящемся в рулевом датчике (прибор РД). Ротор сельсина-трансформатора В6 механически связан с рулем. Сигнал U4 всегда в противофазе с сигналом U1. Он создает отрицательную обратную связь. От значения напряжения U4 зависит угол β перекладки руля (при заданных значениях угла α рыскания судна). Сигнал U5 является сигналом отрицательной обратной связи, обеспечивающим погашение автоколебаний в системе "исполнительный механизм—руль". Суммарный сигнал Uс= U1+ U2+ U3+ U4+ U5 подается на вход усилителя А1.
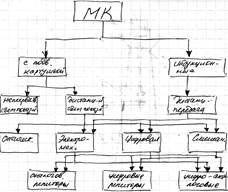
Классификация МК. МК бывают стрелочные (информация с картушки – оптически, дистанционно – электромеханические), информация отражается в аналоговом и аналого-цифровом виде. И индукционные (информация дистанционно – электромеханически(отражается в аналоговом и аналого-цифровом виде),- в цифровом виде(цифровой и аналого-цифровой) и смешанно (отражается в аналоговом, цифровом и аналого-цифровом виде).
Оптическая система дист.передачи. Информация о курсе передается в зеркало. Луч через прозрачное стекло шкалы компаса оптическая линза на зеркало, кот.регулируется под глаз наблюдателя. Имеется специальный подогрев для устранения запотевания стекл. По волоконно-оптическому кабелю инфа снимаясь со спец объктива с определенного сектора картушки отражается на матовом стекле репитора. Электро-техническая сист. Создается на базе ИД ориентации МК, содержит феррозонды, кот.позволяют определить значения составляющих напряженности измеряемого магнитного поля вдоль своей оси. Совместное использование сигналов этих зондов дает возможность определить направление вектора напряженности магнитного поля, создаваемого картушкой МК относительно ДП судна.   Живите по правилу: МАЛО ЛИ ЧТО НА СВЕТЕ СУЩЕСТВУЕТ? Я неслучайно подчеркиваю, что место в голове ограничено, а информации вокруг много, и что ваше право...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 ПАС(преобраз. анал.-цифровой): 1)усиление полезного сигнала
ПАС(преобраз. анал.-цифровой): 1)усиление полезного сигнала