|
|
Пример расчета механической характеристики асинхронного двигателя ⇐ ПредыдущаяСтр 5 из 5 Трехфазный асинхронный двигатель с короткозамкнутым ротором питается от сети с напряжением = 380 В при = 50 Гц. Параметры двигателя: Pн= 14 кВт, nн= 960 об/мин, cosφн= 0,85, ηн= 0,88, кратность максимального момента kм= 1,8. Определить: номинальный ток в фазе обмотки статора, число пар полюсов, номинальное скольжение, номинальный момент на валу, критический момент, критическое скольжение и построить механическую характеристику двигателя. Решение. Номинальная мощность, потребляемая из сети P1н =Pн / ηн = 14 / 0,88 = 16 кВт. Номинальный ток, потребляемый из сети
Число пар полюсов p = 60 f / n1 = 60 х 50 / 1000 = 3, где n1 = 1000 – синхронная частота вращения, ближайшая к номинальной частоте nн= 960 об/мин. Номинальное скольжение sн = (n1 - nн) / n1 = (1000 - 960) / 1000 = 0,04 Номинальный момент на валу двигателя
Критический момент Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м. Критическое скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.
Для построения механической характеристики двигателя с помощью n = (n1 - s) определим характерные точки: точка холостого хода s = 0, n = 1000 об/мин, М = 0, точка номинального режима sн = 0,04, nн = 960 об/мин, Мн = 139,3 Н•м и точка критического режима sк = 0,132, nк = 868 об/мин, Мк =250,7 Н•м. Для точки пускового режима sп = 1, n = 0 находим
По полученным данным строят механическую характеристикудвигателя. Для более точного построения механической характеристики следует увеличить число расчетных точек и для заданных скольжений определить моменты и частоту вращения. Скорость вращения асинхронного двигателя определяется зависимостью
Следовательно, ее можно регулировать, изменяя Регулирование путем изменения частоты питающего напряжения. Применяемые ранее электромашинные преобразователи частоты очень громоздки, сложны в эксплуатации и дороги. Поэтому они практически полностью вытеснены полупроводниковыми преобразователями частоты, которые в настоящее время обеспечивают достаточную надежность в работе. При применении этого способа регулирования необходимо обеспечить (при изменении частоты питающей сети и питающего напряжения) постоянство потока намагничивания асинхронной машины. Регулирование путем изменения числа пар полюсов позволяет получить ступенчатое изменение скорости вращения. Для двукратного изменения скорости отдельные катушки, составляющие данную фазу, переключаются с последовательного согласного соединения на встречное или с последовательного на параллельное. Обмотку ротора в этом случае выполняют короткозамкнутой. Если нужно иметь три или четыре скорости, то на статоре располагают еще одну обмотку, при переключении которой можно получить еще две скорости. Асинхронные электродвигатели с переключением числа пар полюсов называются многоскоростными. Недостатки этого способа регулирования скорости вращения: большие габариты и вес по сравнению с двигателями нормального исполнения, а, следовательно, и большая стоимость; большая величина ступеней регулирования (при частоте 50 Гц скорость вращения поля n, при переключениях изменяется в отношении 3000:1500:1000:750). Регулирование путем включения в цепь ротора добавочных сопротивлений. Этот способ применяется для двигателей с фазовым ротором, он позволяет плавно изменять скорость вращения двигателя. Недостатки: плохие энергетические характеристики асинхронной машины и чрезмерно "мягкая" механическая характеристика машины, что в некоторых случаях (при пульсациях нагрузочного момента) недопустимо. Регулирование путем изменения питающего напряжения. Для двигателей нормального исполнения этот метод неприменим, т.к. пропорционально квадрату уменьшения напряжения питающей сети уменьшается величина момента двигателя. Он применяется для двигателей малой мощности, которые имеют значительные активные сопротивления роторной обмотки, т.к. в этом случае скольжение Синхронный генератор конструктивно сложнее, например, у него на роторе находятся катушки индуктивности. Асинхронный генератор устроен гораздо проще - его ротор напоминает обычный маховик. Как следствие, среднестатистический асинхронный генератор лучше защищен от попадания влаги и грязи (говорят что он имеет закрытую конструкцию) и тут самое время вспомнить о классе защиты. Он обозначается двумя буквами (IP) и двумя цифрами. "2" защита от касания пальцами и от проникновения твердых посторонних частиц диаметром более 12 мм; Самый основной недостаток синхронного генератора - низкая степень защиты от внешних воздействий таких как: пыль, грязь, вода, т.к. синхронный генератор охлаждается «протягивая» через себя воздух, соответственно все что находится в воздухе может попадать в генератор. - для трёхфазных синхронных генераторов допустимый перекос фаз 33% - коэффициент нелинейных искажений 13-25% IP23 и 3-10% IP54 (в зависимости от производителя) Синхронные генераторы, как правило, соответствуют классу IP 23, тогда как асинхронные IP 54. Впрочем, в последнее время практически у всех ведущих производителей появились инновационные синхронные агрегаты удовлетворяющие IP 54. К сожалению асинхронники тоже не лишены недостатков. Способность «проглатывать» пусковые перегрузки ниже, чем у синхронных генераторов. Асинхронный генератор (IP54) вообще не имеет обмоток на роторе. Для возбуждения ЭДС в его выходной цепи используют остаточную намагниченность якоря. Конструктивно такой альтернатор намного проще, надежнее и долговечнее. Кроме того, поскольку обмотки ротора охлаждать не нужно (их просто нет), корпус асинхронного генератора полностью закрыт, что позволяет исключить попадание пыли и влаги. Асинхронные генераторы не восприимчивы к коротким замыканиям, поэтому лучше подходят для питания сварочных аппаратов. - для трёхфазных асинхронных генераторов допустимый перекос фаз 60-70% - коэффициент нелинейных искажений 2-3% Синхронные и асинхронные генераторы отличаются своими возможностями. Мнения специалистов тут расходятся (каждый естественно хвалит своё оборудование), но в среднем, всё выглядит примерно следующим образом: Впрочем, в настоящее время существует множество способов улучшить выходные параметры мини электростанций. В частности, асинхронный генератор, оборудованный стартовым усилителем, способен справиться с пусковыми перегрузками, а качество выдаваемого электричества может быть повышено подключением AVR (автоматического регулятора напряжения). Кстати, на стабильность напряжения оказывает влияние и класс двигателя, а именно его способность поддерживать постоянные обороты (как правило, 3000) при изменениях нагрузки. Синхронные генераторы обеспечивают поддержание напряжения в сети с высокой точностью (колебания в пределах 5%), поэтому позволяют подключать к ним аппаратуру чувствительную к перепадам напряжения, например, компьютеры, телевизоры и другие электронные устройства. Кроме того, такие генераторы без проблем справляются с энергоснабжением электроинструментов и электродвигателей, с реактивной нагрузкой до 65% от своего номинала. Асинхронные генераторы менее точны: они поддерживают напряжение постоянным с точностью 10%, поэтому их нельзя применять для питания высокоточной аппаратуры (Hi-Fi техники и пр.). Подобные генераторы позволяют подключать к ним электроинструменты и электродвигатели с реактивной мощностью до 30% от номинала. Наконец в качестве конструктивного исполнения более предпочтительны генераторы не оборудованные щетками (так называемые brush-less бесщеточные), так как они не требуют обслуживания и не создают помех
26. Устройство и принцип работы синхронного эл. двигателя. Реакция якоря. Угловая характеристика. Пуск. Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки. Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться. При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора. Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения Остальные ответы в 28 вопросе
27. Устройство и принцип работы ДПТ. Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение — создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
Рисунок 2 – Полюса машины постоянного тока: Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника Рисунок 4 – Щетки: 28. Пуск синхронного эл. двигателя. Реакция якоря. Угловая характеристика. Метод асинхронного пуска. Синхронный двигатель не имеет начального пускового момента. Если его подключить к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока, электромагнитный момент будет дважды изменять свое направление, т. е. средний момент за период равняется нулю. При этих условиях двигатель не сможет прийти во вращение, так как его ротор, обладающий определенной инерцией, не может быть в течение одного полупериода разогнан до синхронной частоты вращения. Следовательно, для пуска синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. В настоящее время для этой цели применяют метод асинхронного пуска. При этом методе синхронный двигатель пускают как асинхронный, для чего его снабжают специальной коротко-замкнутой пусковой обмоткой, выполненной по типу «беличья клетка». Чтобы увеличить сопротивление стержней, клетку изготовляют из латуни. При включении трехфазной обмотки статора в сеть образуется вращающееся магнитное поле, которое, взаимодействуя с током I пв пусковой обмотке (рис. 6.48, а), создает электромагнитные силы F и увлекает за собой ротор. После разгона ротора до частоты вращения, близкой к синхронной, постоянный ток, проходящий по обмотке возбуждения, создает синхронизирующий момент, который втягивает ротор в синхронизм. Применяют две основные схемы пуска синхронного двигателя. При схеме, изображенной на рис. 6.48, б,обмотку возбуждения сначала замыкают на гасящий резистор, сопротивление которого R до б превышает в 8 — 12 раз активное сопротивление R в обмотки возбуждения. После разгона ротора до частоты вращения, близкой к синхронной (при s ≈ 0,05), обмотку возбуждения отключают от гасящего резистора и подключают к источнику постоянного тока (возбудителю), вследствие чего ротор втягивается в синхронизм. Осуществить пуск двигателя с разомкнутой обмоткой возбуждения нельзя, так как во время разгона ротора при s > 0 в ней вращающимся магнитным полем индуцируется ЭДС Е в = 4,44 f 2 w вФ m = 4,4 f 1 sw вФ m , где f 2 = f 1 s — частота изменения тока в обмотке возбуждения; w в — число витков обмотки возбуждения; Ф m — амплитуда магнитного потока вращающегося поля.
В начальный момент пуска при s = 1 из-за большого числа витков обмотки возбуждения ЭДС Е вможет достигать весьма большого значения и вызвать пробой изоляции. При схеме, изображенной на рис. 6.48, в, обмотка возбуждения постоянно подключена к возбудителю, сопротивление которого по сравнению с сопротивлением R в весьма мало, поэтому эту обмотку в режиме асинхронного пуска можно считать замкнутой накоротко. С уменьшением скольжения до Одноосный эффект. Для анализа этого явления предположим сначала, что в двигателе отсутствует пусковая обмотка, а обмотка возбуждения замкнута накоротко. В результате при асинхронном пуске двигателя в обмотке возбуждения индуцируется ЭДС с частотой f 2 = f 1 s и по обмотке проходит переменный ток, создающий пульсирующее магнитное поле (обмотка возбуждения в этом случае является однофазной обмоткой переменного тока). Пульсирующее магнитное поле можно разложить на две составляющие: прямое и обратное вращающиеся магнитные поля ротора, которые характеризуются потоками Фпр и Фобр. Частота вращения каждого из этих полей относительно ротора (6.46) nр.пр = n2 + np = n1(1 - s) + n1s = n1, где n2 = n1(1 - s) — частота вращения ротора. Следовательно, оно вращается синхронно с полем статора; образуемый этим полем с током статора электромагнитный момент М пр изменяется в зависимости от скольжения так же, как и в трехфазном асинхронном двигателе (рис. 6.49, кривая 2). Обратное поле ротора вращается относительно статора с частотой (6.47) пр.обр = n2 - n1 = n1(1 - s) - n1s = n1(1 - 2s). При частотах вращения ротора n2 < 0,5n1, т. е. при s > 0,5, обратное поле, как видно из формулы (6.47), перемещается относительно статора в сторону, противоположную направлению вращения ротора; при n2 = 0,5n1, это поле неподвижно относительно статора; при n 2 > 0,5 (т. е. при s < 0,5) оно перемещается в ту же сторону, что и ротор.
В обмотке статора обратным полем индуцируется ЭДС с частотой f1(1 — 2s), для которой обмотка статора является короткозамкнутой. При этом по обмотке статора проходит соответствующий ток. Взаимодействуя с обратным полем ротора, этот ток создает электромагнитный момент М о6р. Так как направление момента зависит от направления вращения поля n р.обр относительно статора, то из формулы (6.47) следует, что он является знакопеременным и изменение его направления происходит при s = 0,5 (рис. 6.49, кривая 3). Таким образом, ток, индуцируемый в обмотке возбуждения при пуске двигателя, создает электромагнитный момент, который при частоте вращения, меньшей 0,5 n 1, является ускоряющим, а при большей частоте вращения — тормозящим. Особенно резко проявляется действие обратного поля при n ≈ 0,5 n 1. Наличие пусковой обмотки на роторе существенно уменьшает обратное магнитное поле и создаваемый им момент. Однако этот момент, складываясь с асинхронным моментом пусковой обмотки (кривая 1), создает в кривой результирующего пускового момента провал при частоте вращения, равной половине синхронной (кривая 4).Этот провал тем больше, чем больше ток в обмотке возбуждения. Очевидно, что включение гасящего сопротивления в цепь обмотки возбуждения (см. рис. 6.48, б) на период пуска уменьшает ток в этой обмотке и улучшает форму кривой пускового момента. Для синхронного двигателя можно написать такие же по виду выражения мощностей, как и для синхронного генератора. Однако применительно к двигателю они будут иметь иные значения. У двигателя P φ = 3 UI cos φ представляет собой мощность, потребляемую им из трехфазной сети. Вычитая из этой мощности потери мощности в обмотке якоря, получаем электромагнитную мощность, т. е. мощность, преобразуемую из электрической в механическую, развиваемую вращающимся ротором: P эм = P ψ - Δ Р я = 3 UI cos φ - 3I 2 r = 3 E 0 I cos ψ. Электромагнитный момент синхронного двигателя может быть выражен через мощность Р эм и угловую скорость ω = π n /30 ротора: М = Р эм/ω. Заменив мощность Р эм ее выражением, получим (11,13)
Если из точки А векторной диаграммы (рис. 11.9, а) опустить перпендикуляр АГ на линию ОВ, то можно получить следующее равенство: I cos ψ = U sin θ/ x c. Заменив I cos ψ в (11.13) его выражением, получим (11,14)
Как видно, при постоянных значениях U, Е, ω и х с момент двигателя прямо пропорционален sin θ. Зависимость М (θ) называется угловой характеристикой синхронного двигателя и приведена на рис. 11.10 в первом квадранте. В пределах от θ = 0 до θ = 90° расположена устойчивая часть характеристики, называемая так потому, что именно здесь возможна устойчивая работа двигателя с различными моментами сопротивления. Любое изменение момента сопротивления М с при работе на устойчивой части характеристики приводит к такому изменению момента двигателя М, при котором неизбежно наступает равенство моментов М и М с . На устойчивой части характеристики расположена точка А, соответствующая номинальному режиму работы. При номинальном режиме θном = 20 ÷ 30°. Максимальный момент, который в состоянии развивать двигатель, наступает при θ = 90°:
Если момент сопротивления М с окажется больше момента Мmax, то двигатель не в состоянии будет его уравновесить и остановится. Отношение Мmax / М ном называется перегрузочной способностью двигателя и для различных двигателей лежит в пределах 2 — 3,2. Перегрузочная способность может быть при необходимости увеличена за счет повышения ЭДС Е 0. Из выражения максимального момента следует, что последний и, следовательно, перегрузочная способность синхронного двигателя пропорциональны первой степени напряжения в отличие от асинхронного двигателя, у которого она пропорциональна квадрату напряжения. Из этого следует, что синхронные двигатели менее чувствительны к изменению напряжения, чем асинхронные. Следует обратить внимание на то, что длительная нагрузка двигателей, превышающая номинальную, недопустима, так как двигатель при этом будет перегреваться. Возможная кратковременная перегрузка должна быть учтена при выборе двигателя по мощности.
Рассмотрим явления, происходящие при изменении нагрузки двигателя. Допустим, что двигатель работает с моментом М = М с и углом θ (см. рис. 11.10), чему соответствует векторная диаграмма, изображенная на рис. 11.9, а. В результате изменения момента сопротивления, например, от М с до М с > М с происходит кратковременное снижение частоты вращения ротора, что сопровождается соответствующим изменением частоты индуктированной ЭДС Е 0 и, следовательно, частоты вращения вектора ЭДС Е 0 на векторной диаграмме. В результате этого возратает угол сдвига фаз θ ЭДС Е 0 относительно напряжения U и как следствие увеличиваются ток I, падение напряжения Iх c , момент М и мощности Р φ и Р эм. Перечисленные величины возрастают до тех пор, пока при некотором угле θ1 (см. рис 11.9, б и 11.10) момент двигателя М 1 не сравняется с моментом сопротивления М с1. При М 1 = М с1 частота вращения ротора снова станет равной частоте вращения поля якоря: n = n 0 = 60 f / р.
В синхронном генераторе основное магнитное поле и основной магнитный поток Ф создаются обмоткой ротора и если машина работает без нагрузки с отключенной обмоткой статора, то в ней имеется только одно магнитное поле ротора и Ф = Ф0. Когда генератор работает под нагрузкой, то появляются токи в фазах обмотки статора. Эти токи создают свое магнитное поле статора, которое можно разделить на две составляющие. Магнитный поток одной части поля охватывает проводники фаз обмотки статора, лежащие в пазах сердечника, и замыкается по стали статора и воздушному зазору. На основное магнитное поле этот поток никакого влияния не оказывает и называется потоком рассеяния статораФs.   ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Что вызывает тренды на фондовых и товарных рынках Объяснение теории грузового поезда Первые 17 лет моих рыночных исследований сводились к попыткам вычислить, когда этот...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|




 .
. питающего напряжения, число пар полюсов
питающего напряжения, число пар полюсов  и величину скольжения
и величину скольжения  . Последнее можно осуществить изменяя
. Последнее можно осуществить изменяя  и
и  .
. резко возрастает и максимум момента сдвигается в зону близкую
резко возрастает и максимум момента сдвигается в зону близкую  и даже в область
и даже в область  . Снижение КПД двигателя, связанное с увеличением потерь мощности
. Снижение КПД двигателя, связанное с увеличением потерь мощности  для этих типов двигателей не имеет существенного значения.
для этих типов двигателей не имеет существенного значения.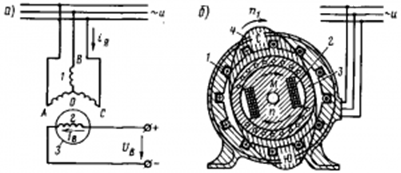 Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 293. Схема асинхронного пуска синхронного двигателя;