
|
|
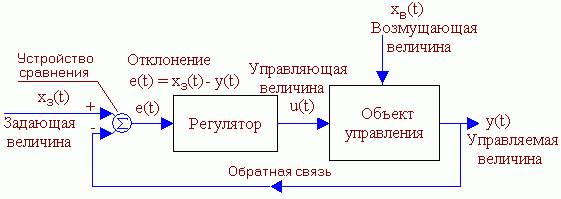
Замкнутая САР с управлением по отклонениюСхема используется для слежения, программного управления и стабилизации. В такой системе регулятор в процессе управления учитывает как задание, так и реальное состояние объекта, а, кроме того, косвенно учитывает и возмущение.
Рис. 5 Функциональная схема замкнутой САР с управлением по отклонению. e(t) – отклонение (ошибка слежения, регулирования) управляемой величины y(t) от задания хз(t). Основные элементы схемы: объект управления, контур главной обратной связи Сравнивающее устройство (сумматор) сравнивает задающую и управляемые величины и вычисляет отклонение, ошибку e(t) = хз(t) - y (t). Регулятор – вырабатывает такое управляющее воздействие u(t) на объект управления, которое сводит ошибку к нулю или допустимому минимуму. В идеале, когда e = 0, хз(t) = y (t) Системы автоматического регулирования предназначены для того, чтобы поддерживать управляемую величину объекта пропорциональной задающей величине с требуемой точностью. Т.о., закон изменения во времени задания повторяется управляемой величиной. Задание, как правило, маломощный сигнал. САР позволяет с помощью этого маломощного сигнала управлять мощным объектом. Типовые динамические звенья Типовые звенья Это простые модели элементов сложных линейных систем и даже систем вцелом. Переходная характеристика звеньев Переходная характеристика или функция позволяет и качественно, и количественно характеризовать быстродействие звеньев и систем. Переходный процесс может быть как монотонным, так и колебательным и его длительность и является количественной характеристикой быстроты реакции звена на прикладываемые к нему воздействия. Типовые звенья бывают:
Основные характеристики линейных звеньев:
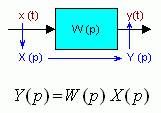
Типовые звенья линейных систем можно определять различными эквивалентными способами, в частности с помощью, так называемой передаточной функции, имеющей, как правило, дробно-рациональный вид, т.е. представляющей собой отношение двух полиномов:
где bi и aj – коэффициенты полиномов. Это т.н. параметры передаточной функции или звена. Передаточная функция – это отношение изображения Y(p) выходного сигнала y(t) звена к изображению X(p) его входного сигнала x(t).
Т.е., передаточная функция позволяет по любому известному входному сигналу x(t) найти выходной y(t). Это значит, что с точки зрения ТАУ передаточная функция полностью характеризует систему управления или ее звено. Это же самое можно сказать и в отношении совокупности коэффициентов полиномов числителя и знаменателя передаточной функции. Наличие нулевых корней в числителе или знаменателе передаточной функции типовых звеньев - это признак для разбиения последних на три группы:
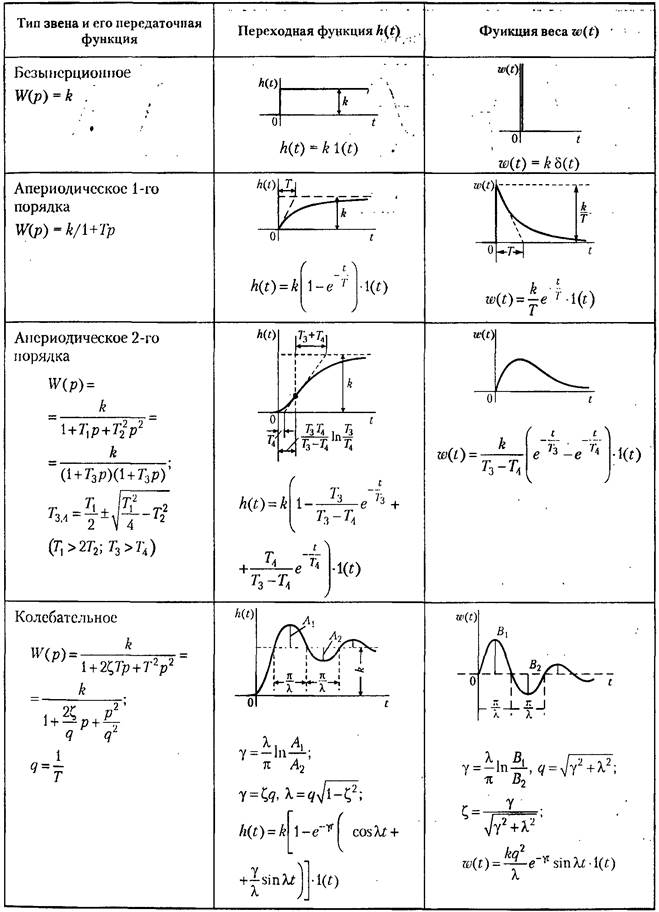
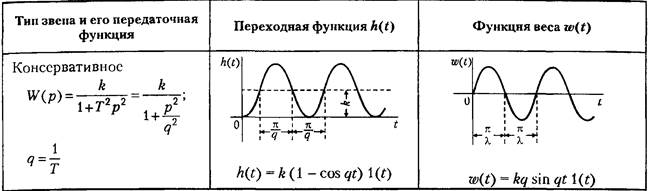
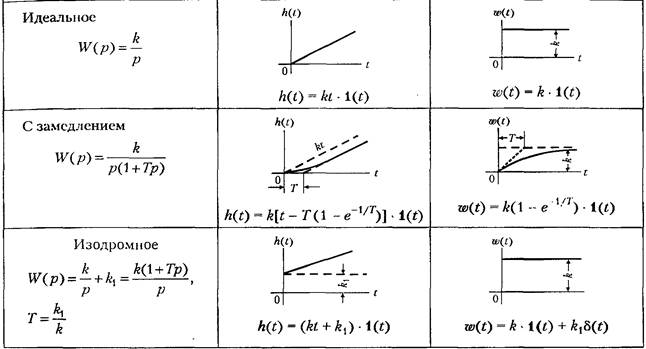
Переходные и весовые характеристики основных типовых звеньев приведены в Таблице 1. Перечисленные линейные звенья содержат один вход и один выход. Существует еще одно линейное звено, которое может иметь несколько, больше одного, входов и один выход: сумматор. Сумматор - необходимое звено для построения модели достаточно сложной системы, состоящей из нескольких звеньев. Типовых звеньев всего около полутора десятков, но из них, как из кубиков (или, если угодно, как любое сложное вещество из отдельных химических элементов), можно построить модель линейной системы управления любой сложности. Минимальный набор звеньев, который позволяет построить модель линейной системы любой сложности, в том числе и самих типовых звеньев, состоит всего из трех звеньев: пропорционального, интегратора и сумматора. Однако модель, построенную из этих трех звеньев, бывает труднее анализировать, чаще удобнее применять кроме них еще несколько типов звеньев. Таблица 1. Передаточные, переходные и весовые функции типовых звеньев. Позиционные
Интегрирующие
Дифферецирующие
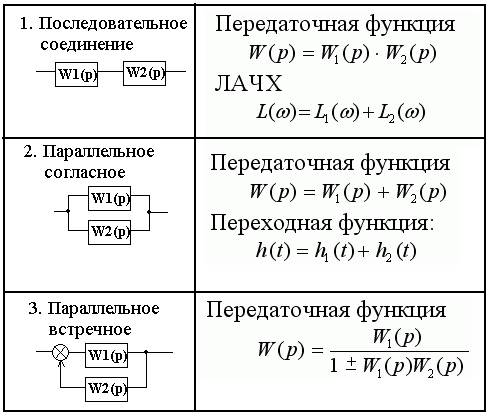
Соединение звеньев.
4. Частотные характеристики Частотная передаточная функция получается из обычной заменой оператора Лапласа s(или р) на комплексную частоту j w, т.е. в результате перехода от изображения Лапласа к изображению Фурье. Дифференциальное уравнение движения системы связывает входной и выходной сигналы (т.е. функции времени), передаточная функция связывает изображения Лапласа тех же сигналов, а частотная ПФ связывает их спектры. Частотная передаточная функция может быть представлена в следующих видах: W (j w) = A (w) e j j(w), или W (j w) = U (w) + jV (w); где: · A (w) - модуль частотной передаточной функции - находится как отношение модулей числителя и знаменателя: · j(w) - фаза частотной передаточной функции - находится как разность аргументов числителя и знаменателя: ·   ЧТО ТАКОЕ УВЕРЕННОЕ ПОВЕДЕНИЕ В МЕЖЛИЧНОСТНЫХ ОТНОШЕНИЯХ? Исторически существует три основных модели различий, существующих между...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|



 U (w) и V (w) - вещественная и мнимая части частотной ПФ. Для их нахождения немобходимо избавиться от мнимости в знаменателе, умножением на сопряженную знаменателю комплексную величину.
U (w) и V (w) - вещественная и мнимая части частотной ПФ. Для их нахождения немобходимо избавиться от мнимости в знаменателе, умножением на сопряженную знаменателю комплексную величину.