|
|
Краткая теория для выполнения лабораторных работ по курсу ОТУ.Стр 1 из 6Следующая ⇒ Краткая теория для выполнения лабораторных работ по курсу ОТУ.
Г. Содержание стр Введение. 3 1. Классификация систем автоматического регулирования. 3 2. Основные понятия. 4 3.Типовые динамические звенья. 7 4. Частотные характеристики. 11 5. Принципы автоматического регулирования. 14 Принцип управления по внешнему возмущению.. 14 Принцип управления по отклонению.. 15 Комбинированное управление. 15 6. Анализ устойчивости САР. 16 6.1. Корневые критерии устойчивости. 17 6.2. Алгебраические критерии. 18 6.2.1 Критерий устойчивости Гурвица. 18 Матрица коэффициентов. 18 6.2.2 Критерий Раусса. 19 6.3. Частотные критерии. 19 6.3.1 Критерий Михайлова. 19 6.3.2 Критерий устойчивости Найквиста. 21 6.4. Использование ЛАЧХ. 22 7. Качество процессов автоматического управления. 23 8. Синтез САР. Регуляторы. 25 9. Краткие сведения о программном комплексе VisSim. 27
Краткая теория Введение ТАУ (теория автоматического управления) – это научная и техническая дисциплина, она изучает общие принципы системной организации на основе построения математических моделей объектов и систем управления. Это позволяет оценивать характеристики и свойства проектируемых систем, создавать системы, отвечающие заданным требованиям качества. Анализ - исследование системы управления, путем построения ее математической модели и изучения свойств этой модели. Анализ проводится с целью выяснения вопроса о том, способна ли в принципе модель САР решать задачу управления, и если нет, то какими методами и средствами ее можно сделать работоспособной. Синтез – (теоретическое конструирование) – это построение модели системы управления, обеспечивающей требуемое поведение объекта управления. Этапы проектирования системы управления
Классификация систем автоматического регулирования I. Классификация по характеру изменения величин: 1 Системы непрерывного действия 2 Системы дискретного действия: 2.1. Системы импульсного действия (AM, ФМ, ЧМ, ШИМ, ЧИМ,...) 2.2. Системы цифрового действия (01001011110101100010101) 2.3. Системы релейного действия II. Классификация по математическим признакам:
III. Классификация по типу ошибки в статике:
IV. Классификация по алгоритмам функционирования (по назначению):
V. По виду цикла управления: 1 Разомкнутые 2 Замкнутые VI. По принципу управления: 1 По отклонению регулируемого параметра 2 По возмущению 3 Комбинированные VII. По наличию или отсутствию вспомогательной энергии: 1 Прямого действия 2 Непрямого действия (косвенные)
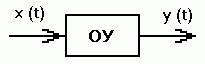
Основные понятия Объект управления (ОУ) в ТАУ – это устройство, машина или процесс и др., которые характеризуются некоторыми физическими величинами. Эти величины могут быть измерены. Объект управления способен воспринимать внешние воздействия и реагировать на них изменением значений выходных величин. Объектами управления в технике могут быть машины, механизмы, электромеханические устройства, более простые САР и др.
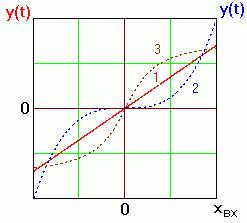
Рис.1 Обозначение объекта управления (ОУ) на функциональной схеме. x(t) - воздействие на объект, y(t) – реакция объекта, отклик на воздействие С точки зрения ТАУ не так важно, из каких физических элементов состоит объект управления (ОУ), куда важнее знать, как объект реагирует на внешние воздействия. Различают статический и динамический режимы работы объекта или системы управления. В статике все сигналы (воздействия и реакции) постоянны, инерционность элементов САР не проявляется. В динамике воздействия, а следовательно и отклики, реакции объектов и систем, изменяются, что приводит к проявлению инерционных свойств объектов. Статическая характеристика – зависимость выходной величины объекта у, т.е. величины характеризующей объект управления, от величины подаваемого на его вход воздействия х, при условии, что подаваемое воздействие постоянно, т.е. х = const. При малых изменениях воздействий, как правило, любой объект является линейным. Т.е. малые изменения воздействий приводят к малым изменениям реакций, пропорциональным изменению воздействий.
Рис. 2 Примеры статических характеристик объектов управления. 1 – линейная характеристика; 2,3 – нелинейные характеристики Характеристики объекта:
Свойства объекта:
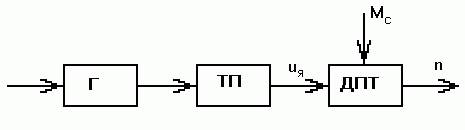
Функциональная схема состоит из блоков соответствующих функциональным, физически существующим элементам объектов, а стрелки указывают на направление передачи энергии между ними. Пример:
Рис.3 Пример функциональной схемы. Г – генератор; ТП – тиристорный преобразователь; ДПТ – двигатель постоянного тока Структурная (структурно-алгоритмическая) схема – состоит из звеньев, соответствующих математическим операциям преобразования сигналов; стрелки между блоками указывают направление передачи информации (сигналов).
Пример:
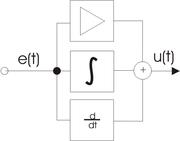
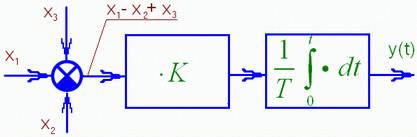
Рис. 4 Фрагмент структурной схемы. Показаны сумматор, пропорциональное звено и интегратор. Замечание: в структурной схеме в блок может входить только одна стрелка, за исключением сумматора и перемножителя сигналов. Примечание. Функциональная схема объекта единственна и может отличаться лишь глубиной, подробностью отображения элементов объекта. Структурных схем для одного и того же объекта может быть составлено несколько разных, причем все они будут эквивалентны между собой. Структурная схема – это особого вида математическая модель объекта или системы управления. Типовые динамические звенья Типовые звенья Это простые модели элементов сложных линейных систем и даже систем вцелом. Переходная характеристика звеньев Переходная характеристика или функция позволяет и качественно, и количественно характеризовать быстродействие звеньев и систем. Переходный процесс может быть как монотонным, так и колебательным и его длительность и является количественной характеристикой быстроты реакции звена на прикладываемые к нему воздействия. Типовые звенья бывают:
Основные характеристики линейных звеньев:
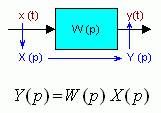
Типовые звенья линейных систем можно определять различными эквивалентными способами, в частности с помощью, так называемой передаточной функции, имеющей, как правило, дробно-рациональный вид, т.е. представляющей собой отношение двух полиномов:
где bi и aj – коэффициенты полиномов. Это т.н. параметры передаточной функции или звена. Передаточная функция – это отношение изображения Y(p) выходного сигнала y(t) звена к изображению X(p) его входного сигнала x(t).
Т.е., передаточная функция позволяет по любому известному входному сигналу x(t) найти выходной y(t). Это значит, что с точки зрения ТАУ передаточная функция полностью характеризует систему управления или ее звено. Это же самое можно сказать и в отношении совокупности коэффициентов полиномов числителя и знаменателя передаточной функции. Наличие нулевых корней в числителе или знаменателе передаточной функции типовых звеньев - это признак для разбиения последних на три группы:
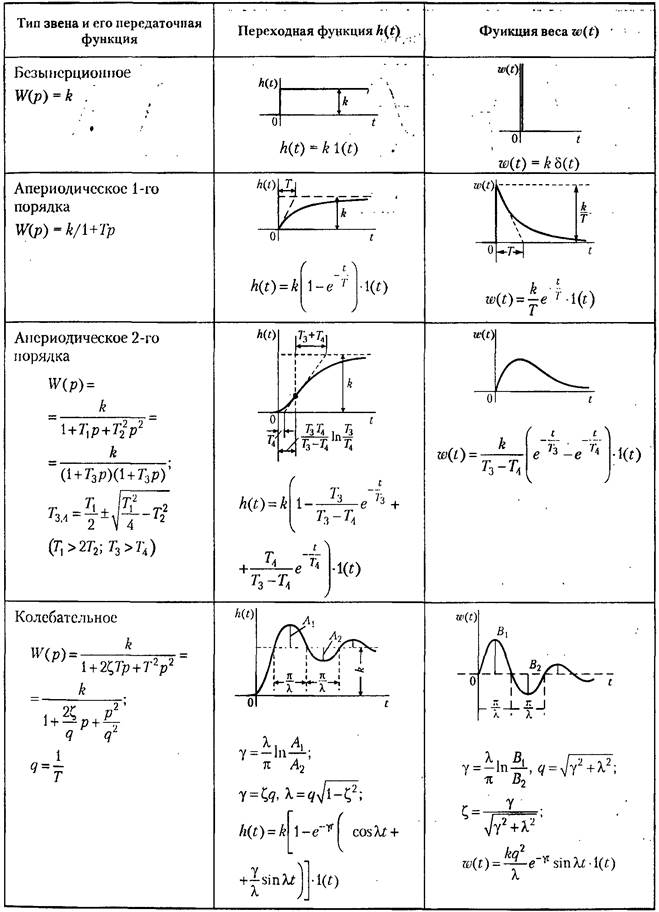
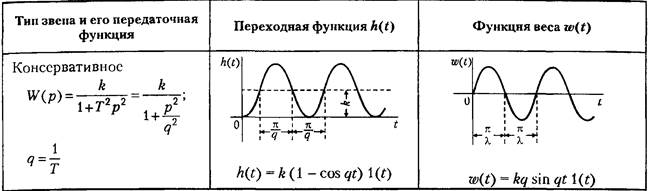
Переходные и весовые характеристики основных типовых звеньев приведены в Таблице 1. Перечисленные линейные звенья содержат один вход и один выход. Существует еще одно линейное звено, которое может иметь несколько, больше одного, входов и один выход: сумматор. Сумматор - необходимое звено для построения модели достаточно сложной системы, состоящей из нескольких звеньев. Типовых звеньев всего около полутора десятков, но из них, как из кубиков (или, если угодно, как любое сложное вещество из отдельных химических элементов), можно построить модель линейной системы управления любой сложности. Минимальный набор звеньев, который позволяет построить модель линейной системы любой сложности, в том числе и самих типовых звеньев, состоит всего из трех звеньев: пропорционального, интегратора и сумматора. Однако модель, построенную из этих трех звеньев, бывает труднее анализировать, чаще удобнее применять кроме них еще несколько типов звеньев. Таблица 1. Передаточные, переходные и весовые функции типовых звеньев. Позиционные
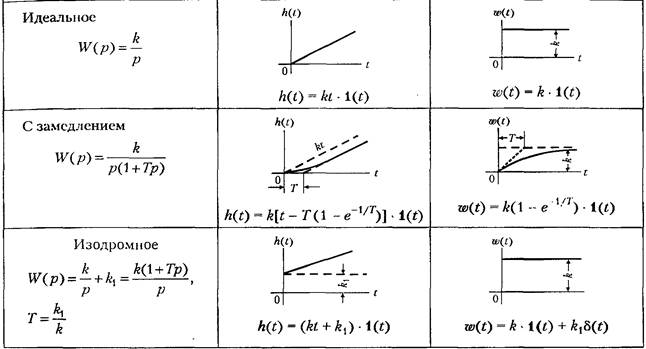
Интегрирующие
Дифферецирующие
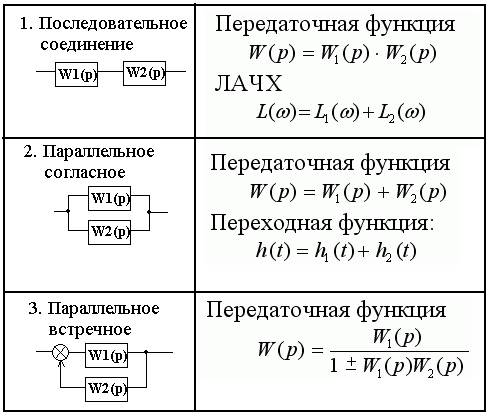
Соединение звеньев.
4. Частотные характеристики Частотная передаточная функция получается из обычной заменой оператора Лапласа s(или р) на комплексную частоту j w, т.е. в результате перехода от изображения Лапласа к изображению Фурье. Дифференциальное уравнение движения системы связывает входной и выходной сигналы (т.е. функции времени), передаточная функция связывает изображения Лапласа тех же сигналов, а частотная ПФ связывает их спектры. Частотная передаточная функция может быть представлена в следующих видах: W (j w) = A (w) e j j(w), или W (j w) = U (w) + jV (w); где: · A (w) - модуль частотной передаточной функции - находится как отношение модулей числителя и знаменателя: · j(w) - фаза частотной передаточной функции - находится как разность аргументов числителя и знаменателя: · Анализ устойчивости САР Понятие устойчивости системы регулирования связано с ее способностью возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Устойчивость является одним из главных требований, предъявляемых к автоматическим системам. Понятие устойчивости можно распространить и на случай движения САР:
Движение любой СУ описывается с помощью дифференциального уравнения, которое в общем случае описывает 2 режима работы системы: - режим установившегося состояния - режим движения При этом общее решение в любой системе можно записать в виде:
Вынужденная составляющая определяется входным воздействием на вход СУ. Этого состояния система достигает по окончании переходных процессов.
Коэффициенты a0,a1,…an включают в себя параметры системы => изменение любого коэффициента дифференциального уравнения приводит к изменению целого ряда параметров системы. Решение однородного дифференциального уравнения
где постоянные интегрирования, а – корни характеристического уравнения следующего вида:
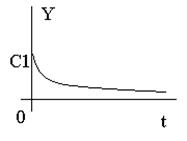
Характеристическое уравнение представляет собой знаменатель передаточной функции приравненный к нулю. Корни характеристического уравнения могут быть вещественными, комплексно-сопряженными и комплексными, что определяется параметрами системы. Чтобы оценивать устойчивость систем, разработан ряд критериев устойчивости Все критерии устойчивости делятся на 3 группы: - корневые - - частотные Устойчивая система.
незатухающий процесс Неустойчивая система
3) отрицательной вещественной частью
вещественной частью
Неустойчивая система
монотонный колебательный процесс гармонические колебания с постоянной частотой и амплитудой.
Алгебраические критерии. Матрица коэффициентов По диагонали от левого верхнего угла до правого нижнего выписывают все коэффициенты по порядку от а1 до аn. Каждая строка дополняется коэффициентами с возрастающими индексами слева направо так, чтобы чередовались строки с чётными и нечётными индексами. В случае отсутствия даннного коэффициента или если его индекс <0 или >n, то на его место пишется 0.
0
……………..аn 3= а0 а2 а4 0 а1 а3
n =аn* n-1 Если аn=0, то имеет место апериодическая граница устойчивости.
Критерий Раусса. Так же базируется на коэффициентах характеристического уравнения, из которого строится таблица.
b1=(a1*a2-a0*a3)/a1 b2=(a1*a4-a0*a5)/a1 b3=(a1*a6-a0*a7)/a1 b4=(a1*a8-a0*a9)/a1 c1=(b1*a3-a1*b2)/b1 c2=(b1*a5-a1*b3)/b1…… Для устойчивости системы все коэффициенты 1-го столбца должны быть больше 0 а0>0, a1>0… Частотные критерии Критерий Михайлова. Критерий базируется на поведении кривой, которую описывает конец вектора (X(ω),Y(ω)) замкнутой системы при изменении частоты от 0 до + Возьмём характеристический полином следующего вида:
Подставим в него
Изобразим годограф Михайлова выражения
Берём значения Формулировка критерия Михайлова. Чтобы САР была устойчивой, необходимо и достаточно, чтобы вектор D (jω) при изменении частоты от 0 до +∞ начал движение с точки, лежащей на положительной вещественной оси, и, вращаясь только против часовой стрелки и нигде не обращаясь в нуль, прошел последовательно n квадрантов комплексной плоскости, повернувшись на угол n∙π/2, где n – степень характеристического уравнения D (jω)= 0 Другими словами, требуется, чтобы кривая Михайлова проходила последовательно
Устойчивая Неустойчивая Апериодическая Колебательная граница устойчивости граница устойчивости Другая формулировка критерия Михайлова: Она состоит в использовании свойства перемежаемости корней многочленов Идя по кривой Михайлова от т. Это значит, что корни уравнений Кривые
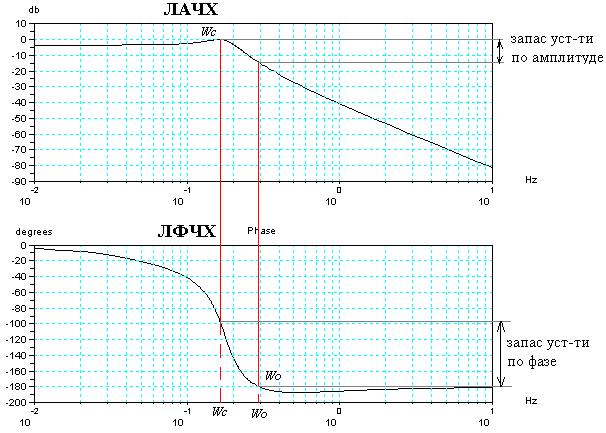
Перемежаться должны корни Условием устойчивости системы является перемежаемость корней полиномов вещественной и мнимой частей комплексной передаточной функции. Нарушение этого условия говорит о неустойчивости системы. Использование ЛАЧХ. Логарифмические критерии устойчивости являются следствием критерия Найквиста, поэтому так же позволяют судить об устойчивости замкнутой системы управления по логарифмическим частотным характеристикам разомкнутой системы. Следовательно, здесь так же рассматриваются два случая: а) если САР в разомкнутом состоянии устойчива
Для устойчивости замкнутой САР необходимо и достаточно, чтобы точка пересечения фазовой характеристики разомкнутой системы с линией Запас устойчивости по модулю ∆L показывает, насколько может измениться модуль АФЧХ для выхода системы на границу устойчивости при неизменных фазовых соотношениях. Запас устойчивости по фазе ∆φ показывает, насколько должна измениться фаза каждого вектора АФЧХ для выхода системы на границу устойчивости при неизменных их модулях. Требования к запасу устойчивости по амплитуде ≥8 -10 дБ, по фазе – ≥30 - 35º.
б) если САР в разомкнутом состоянии не устойчива
Для устойчивости замкнутой САР необходимо и достаточно, чтобы сумма переходов логарифмической фазовой характеристики разомкнутой системы через критический отрезок была равна l/2, где l – число корней с положительной вещественной частью в знаменателе передаточной функции разомкнутой системы W(p). Критическим отрезком называется область с положительным значением ЛАЧХ, сложные системы могут иметь два и более критических отрезков. Переход сверху вниз считается положительным (+1), снизу вверх – отрицательным (-1), если фазовая характеристика начинается на оси -180º и идет вниз, то переход равен +1/2, если вверх, то –1/2. а) ЛФЧХ не пересекает критический отрезок, l=0, следовательно замкнутая система усойчива; б) в данном случае система устойчива, так как при l=1, имеется +1/2 перехода через критический отрезок на частоте ω=0; в) здесь имеется +1 переход на частоте Ω2 и –1 переход на частоте Ω1, замкнутая система устойчива так как l=0 и сумма переходов равна нулю; г) показан случай, когда критический отрезок состоит из двух частей, одна его часть находится на частотах ω≤ω1, а другая на частотах ω2≤ω≤ω3, так как имеется –1 переход при l=3, то замкнутая система неустойчива.
Синтез САР. Регуляторы.
Под синтезом САР понимают работу по расчету ее рациональной структуры и оптимальных параметров отдельных элементов. При решении задачи синтеза часть структуры системы, например, объект управления, регулирующие органы, средства измерения и т.д., известны. Неизвестной является регулирующая часть САР. Задачей математического синтеза является определение оптимального, т.е. наилучшего в данных условиях, алгоритма или закона регулирования. Для большинства используемых в тепловой автоматике САР структура и алгоритмы регулирования известны. Например, САР уровня жидкости, так называемый трехимпульсный регулятор, реализующий пропорционально-интегральный закон, обеспечивает требуемое качество регулирования. В этом случае задача синтеза сводится к расчету параметров этого регулятора на основе характеристик конкретного объекта, регулирующих органов и т.д. Такую задачу часто называют инженерным синтезом. Задачу инженерного синтеза можно считать завершенной, если расчет качества ожидаемого переходного процесса удовлетворяет требованиям к системе. Не исключены случаи, когда в рамках выбранной структуры это сделать не удается. Тогда приходится использовать дополнительные сигналы, например, возмущениия производимые от отклонения, использовать местные обратные связи, вводить корректирующие устройства. Имея в наличии структуру, алгоритм и его численные параметры, можно решать третью задачу – техническую реализацию. В подавляющем большинстве случаев регулятор регулятор собирается из стандартных блоков, поэтому под синтезом понимают более узкую задачу – расчет корректирующих устройств САР. ПИД-регулятор
Схема, иллюстрирующая принцип работы ПИД-регулятора
Пропорционально-интегрально-дифференциальный (ПИД) регулятор — устройство в цепи обратной связи, используемое в системах автоматического управления для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (уставки) и выдаёт управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения (или, что то же самое, производной измеряемой величины).
Если какие-то из составляющих не используются, то регулятор называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п.
Общие сведения Интегральная составляющая
Для устранения статической ошибки используют интегральную составляющую. Она позволяет регулятору «учиться» на предыдущем опыте. Если система не испытывает внешних возмущений, то через некоторое время регулируемая величина стабилизируется на заданном значении, сигнал пропорциональной составляющей будет равен нулю, а выходной сигнал будет полностью обеспечивать интегральная составляющая. Теория
Назначение ПИД-регулятора — в поддержании заданного значения x0 некоторой величины x с помощью изменения другой величины u. Значение x0 называется уставкой, а разность e = (x0 − x) — невязкой или рассогласованием.
Выходной сигнал регулятора u определяется тремя слагаемыми:
где Кp, Кi, Кd — коэффициенты усиления пропорциональной, интегральной и дифференциальной составляющих регулятора, соответственно.
Большинство методов настройки ПИД-регуляторов используют несколько иную формулу для выходного сигнала, в которой на пропорциональный коэффициент усиления умножены также интегральная и дифференциальная составляющие:
Часто в качестве параметров ПИД-регулятора используются: относительный диапазон
постоянные интегрирования и дифференцирования, имеющие размерность времени
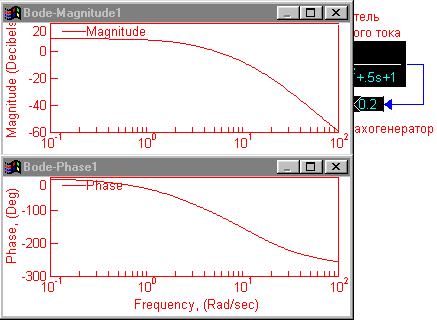
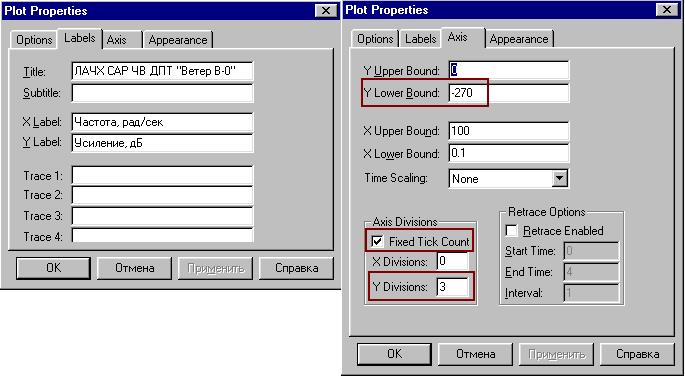
Следует учитывать, что термины используются по-разному в различных источниках и разными производителями регуляторов. Построение ЛАЧХ и ЛФЧХ. Порядок построения ЛАЧХ и ЛФЧХ в программе VisSim следующий. 1. Выделить элементы контура для которых строяться ЛЧХ. Выделенные элементы будут закрашены в черный цвет. Генератор сигнала и осциллограф не должны быть выделены. Надписи могут быть выделены, но это не красиво. 2. В меню VisSim Analyze выбрать Frequency Response. В верхней левой части рабочего пространства появятся окна ЛАЧХ (Bode Magnitude) и ЛФЧХ (Bode Phase). Окна нужно растянуть и расположить ЛФЧХ точно под ЛАЧХ.
3. Показать сетки координат на графиках и сделать надписи по-русски. Для этого дважды щелкнуть по окну с ЛАЧХ, на первой вкладке Options поставить галочку в прямоугольнике Grid Lines, перейти на вкладку Labels и ввести заголовок окна и название осей. Так же, в пункте Axis Divisions можно задать фиксированное число делений координатных осей, это особенно удобно в отношении фазовой оси Y.
В результате ЛАЧХ и ЛФЧХ примут вид:
Примечание. Для изменения частотного диапазона, в котором строится ЛАЧХ, необходимо выбрать Analyze - Frequency Range, и установить начальное и конечное значения частотного диапазона. Например, Start - 0.001, End 10, число шагов Step Count 200. Отметим, что большое число декад снижает точность определения значений по ЛАЧХ.
Краткая теория для выполнения лабораторных работ по курсу ОТУ.
Г. Содержание стр Введение. 3 1. Классификация систем автоматического регулирования. 3 2. Основные понятия. 4 3.Типовые динамические звенья. 7 4. Частотные характеристики. 11 5. Принципы автоматического регулирования. 14 Принцип управления по внешнему возмущению.. 14 Принцип управления по отклонению.. 15 Комбинированное управление. 15 6. Анализ устойчивости САР. 16 6.1. Корневые критерии устойчивости. 17 6.2. Алгебраические критерии. 18 6.2.1 Критерий устойчивости Гурвица. 18 Матрица коэффициентов. 18 6.2.2 Критерий Раусса. 19 6.3. Частотные критерии. 19 6.3.1 Критерий Михайлова. 19 6.3.2 Критерий устойчивости Найквиста. 21 6.4. Использование ЛАЧХ. 22 7. Качество процессов автоматического управления. 23 8. Синтез САР. Регуляторы. 25 9. Краткие сведения о программном комплексе VisSim. 27
Краткая теория Введение ТАУ (теория автоматического управления) – это научная и техническая дисциплина, она изучает общие принципы системной организации на основе построения математических моделей объектов и систем управления. Это позволяет оценивать характеристики и свойства проектируемых систем, создавать системы, отвечающие заданным требованиям качества. Анализ - исследование системы управления, путем построения ее математической модели и изучения свойств этой модели. Анализ проводится с целью выяснения вопроса о том, способна ли в принципе модель САР решать задачу управления, и если нет, то какими методами и средствами ее можно сделать работоспособной. Синтез – (теоретическое конструирование) – это построение модели системы управления, обеспечивающей требуемое поведение объекта управления.   Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор...  Конфликты в семейной жизни. Как это изменить? Редкий брак и взаимоотношения существуют без конфликтов и напряженности. Через это проходят все...  ЧТО И КАК ПИСАЛИ О МОДЕ В ЖУРНАЛАХ НАЧАЛА XX ВЕКА Первый номер журнала «Аполлон» за 1909 г. начинался, по сути, с программного заявления редакции журнала...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|



 U (w) и V (w) - вещественная и мнимая части частотной ПФ. Для их нахождения немобходимо избавиться от мнимости в знаменателе, умножением на сопряженную знаменателю комплексную величину.
U (w) и V (w) - вещественная и мнимая части частотной ПФ. Для их нахождения немобходимо избавиться от мнимости в знаменателе, умножением на сопряженную знаменателю комплексную величину.
 Переходная составляющая определяется решением однородного дифференциального уравнения вида:
Переходная составляющая определяется решением однородного дифференциального уравнения вида:



 алгебраические
алгебраические 2)
2)  положительные вещественные корни
положительные вещественные корни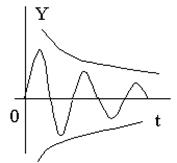
 корни комплексно-сопряженные с
корни комплексно-сопряженные с
 Система устойчива.
Система устойчива. 4) комплексно-сопряженные с положительной
4) комплексно-сопряженные с положительной


 5)
5)  комплексные корни (чисто мнимые)
комплексные корни (чисто мнимые)


 а1 а3 а5 ………0 1=а1>0
а1 а3 а5 ………0 1=а1>0
 а0 а2 а4 ………0 а1 а3
а0 а2 а4 ………0 а1 а3 а1 а3 а5…....0 2= а0 а2
а1 а3 а5…....0 2= а0 а2
 ………………. а1 а3 а5
………………. а1 а3 а5
 Если n1=0, то это колебательная граница устойчивости.
Если n1=0, то это колебательная граница устойчивости. Для устойчивости систем по критерию Раусса необходимо и достаточно чтобы при а0>0 все коэффициенты первого столбца таблицы Раусса были положительными.
Для устойчивости систем по критерию Раусса необходимо и достаточно чтобы при а0>0 все коэффициенты первого столбца таблицы Раусса были положительными. .
.
 (1)
(1) и выделим вещественную и мнимую части.
и выделим вещественную и мнимую части.
 - вещественная часть,
- вещественная часть,

 - мнимая часть.
- мнимая часть.
 на комплексной плоскости.
на комплексной плоскости.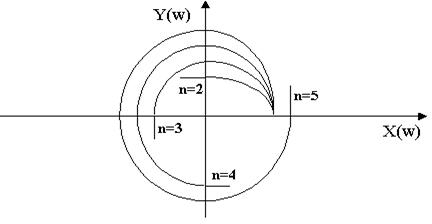
 и строим годограф. Для различных
и строим годограф. Для различных  годограф имеет формы, представленные на рисунке. Эти годографы называются кривыми Михайлова. Кривая Михайлова строится по точкам, рассчитывается
годограф имеет формы, представленные на рисунке. Эти годографы называются кривыми Михайлова. Кривая Михайлова строится по точкам, рассчитывается  и
и  для данной частоты, на кривой указываются значения частоты.
для данной частоты, на кривой указываются значения частоты.

 и
и  .
. в направлении возрастания частоты, мы выходим из оси
в направлении возрастания частоты, мы выходим из оси  , затем пересекаем ось
, затем пересекаем ось  , потом снова
, потом снова  и т. д.
и т. д. и
и  должны следовать поочерёдно друг за другом.
должны следовать поочерёдно друг за другом. и
и  имеют приблизительно такой вид:
имеют приблизительно такой вид:

 ,
,  ,
,  ,… Между ними должно быть следующее соотношение:
,… Между ними должно быть следующее соотношение: 
 лежала правее частоты среза (точки пересечения ЛАЧХ с осью 0 дБ).
лежала правее частоты среза (точки пересечения ЛАЧХ с осью 0 дБ).