
|
|
Методы измерения дальности. Импульсные методы измерения дальности. Структурная схема и принцип работы следящего измерителя. Точность измерения.[казаринов, 288-292?,181?] Методы измерения дальности В РЛС и РЧС используются импульсные, фазовые и частотные методы измерения дальности. 2.5.1 Импульсный метод измерения дальности основан на измерении времени запаздывания сигнала; кратко идея этого метода была рассмотрена в разделе 2.2. Этот метод имеет очень широкое применение, особенно в РЛС; поэтому рассмотрим структурные схемы импульсных измерителей дальности более подробно. Одноканальные измерители дальности могут быть реализованы на согласованном фильтре с выходным переставаемым устройством, с помощью которого оценивается дальность по времени задержки сигнала рис.2.11
Рис. 2.11
Сигнал с выхода согласованного фильтра подается на выходное устройство, в качестве которого может использоваться электроннолучевая трубка (ЭЛТ), бортовая ЭВМ и др.; перестройка выходного устройства по дальности производится с помощью развертки в ЭЛТ или автоматического отсчета дальности в ЭВМ через определенные интервалы времени и т.д. Типовая схема индикатора (выходного устройства) на ЭЛТ показана на рис. 2.12.
Для измерения дальности до многих целей необходимо в масштабе M поставить в соответствие измеряемую дальность D и длину развертки L на экране ЭЛТ M D = l (2.22) Развертка по дальности может осуществляться по радиусу, диаметру или длине окружности ЭЛТ. За время задержки τэ ьфч=2Dmax/c развертка на экране должна достигнуть длины l =2 D max/ c = τ 3 V p , (2.23) где V p – скорость развертки, связанная с масштабом M соотношением M =2 V p/ c. (2.24)
На вход канала развертки по дальности подается синхроимпульс с частотой повторения F П=1/ T П. Для формирования линейной развертки на экране ЭЛТ в генераторе пилообразного напряжения (ГПИ) формируется пилообразное напряжение. Длительность прямого хода пилы определяется максимальной дальностью D max и равно τ3 max. Время обратного хода обычно составляет (0,1÷0,2) τ 3 max. От линейности ГПН зависит точность измерения. Отсчет дальности производится с помощью колибрационных меток. В качестве генератора меток используется генератор с контуром ударного возбуждения (ГКУВ), который генерирует затухающее синусоидальное напряжение в ответ на импульс запуска развертки. Это напряжение преобразуется амплитудным компаратором (АК), состоящим из ограничителей и дифференцирующих цепей, в импульсы меток времени (колибрационные метки). Эти метки подаются на смеситель (СМ), на второй вход которого поступают принятые приемником сигналы, полученные от объектов наблюдения. Выход смесителя подключается к отклоняющим пластинам ЭЛТ. Для подсветки экрана ЭЛТ во время прямого хода луча используется формирователь напряжения подсветки (ФП), работающий от ГПИ. Для увеличения стабильности частоты FП и колибрационных меток часто используются кварцевые генераторы (рис.2.13). Делитель частоты в схеме рис.2.13 используется для понижения частоты колибрационных меток до частоты F П, благодаря чему обеспечивается жесткая связь частоты меток и развертки. Схема И формирует короткий импульс начала развертки.
Измерение дальности сопровождается ошибками, причинами которых является: Неточность синхронизации ∆ D c=∆ t c c /2 (2.25) где ∆ t c – время рассогласования запуска развертки на начальном участке излучения зондирующего импульса РЛС; Задержка сигналов ∆ t 3 в цепях обработки сигнала приемником дальномера
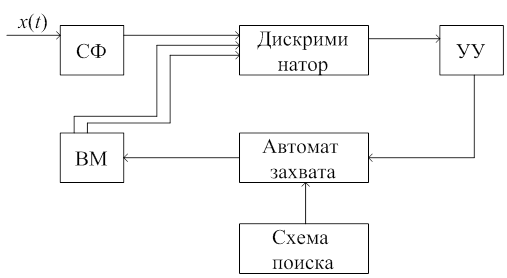
Неточность масштаба и способа отсчета дальности на индикаторе, в том числе в результате искажения сигнала помехами. Предельная разрешающая способность по дальности ∆ D П определяется интервалом неопределенности зондирующего сигнала τИ и разрешающей способностью ЭЛТ Q (Q равно отношению толщине луча у диаметру ЭЛТ). Тогда ∆ D П= D Q + c τ И/2. (2.27) Наличие шумов в приемнике может увеличиваться ∆DП на величину σD, определяемую потенциальной погрешностью στ2 определения измеряемого параметра (времени задержки) приемником (потенциальной помехоустойчивостью). Предельное значение среднеквадратического значения этой погрешности определяется отношением сигнал/шум h 2=2 E / N 0 и эффективной полосой пропускания СФ -
Для повышения помехоустойчивости в РЛС часто используются следящие измерители дальности, которые получили название: системы автоматического сопровождения по дальности (АСД). Одна из возможных схем АСД, реализующая критерий максимального правдоподобия при оценке дальности, приведена на рис 2.14.
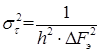
Рис 2.14 Структурная схема АСД и временная диаграмма её работы
Сигнал x (t) от приёмника измерителя дальности поступает на согласованный фильтр (СФ), на выходе которого формируется сигнал u (t) в виде прямоугольного импульса. Временной модулятор (ВМ) формирует первый селекторный импульс τ с= τ И (для схемы И1), второй селекторный импульс формируется линией задержки (τИ). Дискриминатор на схеме совпадения И1 и И2 определяет время перекрытия селекторных импульсов с сигналом u (t) на выходе согласованного фильтра (причем схеме И1 имеет на выходе сигнал положительный полярности, схема И2 - отрицательной). В интеграторе (ИН) происходит усреднение энергии выходных импульсов схем И1 и И2, в результате чего создается результирующаее напряжение ∆ U, величина и знак которого определяются рассогласованием селекторных импульсов и сигнала u (t). На эпюре рис. 2.14 а) показано состояние, при котором оба селекторных импульса находятся в пределах длительности сигнала u (t) и имеется сигнал как на выходе схемы И1 , так и на выходе схемы И2. При этом результирующее напряжение на выходе интегратора ∆ U = 0 и схема управления (УУ) не меняет положения селекторных импульсов. Если имеет место опережение селекторных импульсов (эпюре рис. 2.14 б)), то на выходе схемы И2 сигнал отсутствует и результирующее напряжение на выходе интегратора ∆ U >0 и схема управления (УУ) действует на временной модулятор (ВМ) так, чтобы уменьшить это рассогласование, то есть доплнительно задерживает селекторный импульс τ с, а вместе с ним и селекторный импульс τ И. Если имеет место отставание селекторных импульсов (эпюре рис. 2.14 в)), то на выходе схемы И1 сигнал отсутствует и результирующее напряжение на выходе интегратора ∆ U <0 и схема управления (УУ) во временном модуляторе уменьшает задержку селекторного импульса τ с. Схема упраления (УУ) строится так, чтобы процесс устранение временного рассогласования был подобен переходному процессу в следящей системе. После окончание переходного процесса выдается оценка измеряемого параметра (в данном случае дальности) в соответствии с положением селекторного импульса временного модулятора. В цифровых электронных схемах АСД в качестве временного модулятора может использоваться реверсивный счётчик импульсов. Для работы следящего измерителя необходимо, чтобы селекторные импульсы перекрывались сигналом на выходе СФ; поэтому для первоначального перекрытия используются схемы поиска и захвата сигнала x (t). Один из возможных вариантов такой схемы, совмещенной со следящим измерителем, приведен на рис.2.15
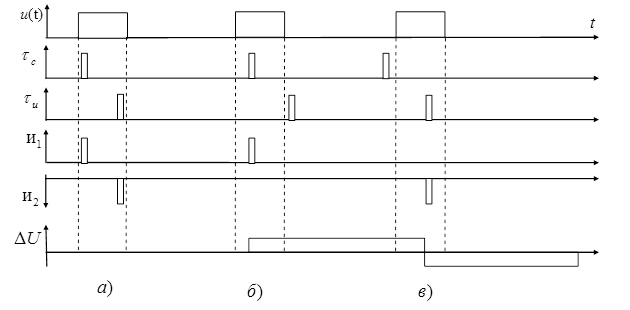
Рис. 2.15 Структурная схема АСД с автоматом захвата
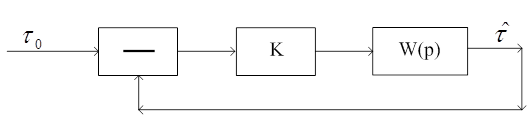
В режиме поиска сигнала следящая система разомкнута: УУ отключены от ВМ. Селекторный импульсы ВМ перемещаются периодически с периодом Tп вдоль оси времени путем подачи на ВМ линейно-меняющегося напряжения со схемы поиска через автомат захвата. Как только селекторные импульсы совмещаются с сигналом, срабатывает автомат захвата, отключает систему поиска и переключает следящий измеритель в режим сопровождения по дальности – схема УУ подключается к ВМ. Точность сопровождения по дальности. В системе АСД, как и в любой следящей системе, имеют место быть ошибки переходного процесса и ошибки установившегося режима. Ошибки установившегося режима состоят из ошибок регулирования (динамических ошибок) и ошибок, обусловленных действием помех, которые будут определены аналогично тому, как это сделано в неследящем измерителе (2.28). Рассмотрим ошибки регулирования. Система АСД является импульсной следящей системой, значения рассогласования получаются в дискретные моменты времени с частотой F П. Такую систему можно рассматривать как непрерывную, если F П≤ F В, где F В – верхняя частота спектра ошибки, которая определяется скоростью и маневренностью объектов наблюдения. Практически F В=0,5÷0,2 Гц, а F П=300-2000 Гц. Представим систему АСД в виде 2-х звеньев рис.2.16: радиоприемное устройство с передаточной функцией К (в сравнении со следящей системой радиоприемное устройство является широкополосным и его можно считать безынерционным) и интегратор, усредняющий напряжения временного дискриминатора с передаточной функцией W (p).
Рис. 2.16 Эквивалентная схема системы АСД
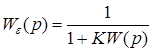
На вход АСД поступает истинное значение τ 0, а по цепи обратной связи измененная оценка задержки Изображение выходного сигнала τ (p) = ε (p) а передаточная функция замкнутой системы
Тогда τ (p) = τ 0(p) Ф(р);
Следовательно, передаточная функция ошибки
Из теории регулирования известно, что значение ошибки установившимся режиме определяется разложением передаточной функций ошибки (2.31) в ряд возрастающим степеням p. Если ограничиться тремя членами, то получим
где Ряд (2.32) сходится при p →0. Применяя к каждому члену ряда обратное преобразование Лапласа, получим
сходящийся при больших значениях t. Первый член ряда (2.33) определяет статическую ошибку дальности, второй – скоростную, третий – ошибку ускорения. Зная закон изменения τ0(t) и коэффициенты с 0, с 1 и с 2, можно вычислить ошибки регулирования (динамические ошибки). Коэффициенты ряда, как видно из (2.32) определяются передаточной функцией ошибки. Если АСД один интегратор, то это система первого порядка и с 0=0, с 1=1/ K, c 2= T max/ K, (2.34) для двух интеграторов (система 2-го порядка) с 0=0, с 1=0, c 2=2/ K, (2.35) T max – максимальная постоянная времени системы. С увеличением порядка системы динамическая ошибка уменьшается, а при увеличении К динамическая ошибка так же уменьшается, но увеличивается ошибка флуктационного шума (2.28), так как с ростом усиления увеличивается полоса пропускания ∆ F Э. В результате суммарная ошибка (
коэффициента усиления приёмника
  Что способствует осуществлению желаний? Стопроцентная, непоколебимая уверенность в своем...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  Система охраняемых территорий в США Изучение особо охраняемых природных территорий(ООПТ) США представляет особый интерес по многим причинам... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|

 Рис. 2.12 Индикатор на ЭЛТ
Рис. 2.12 Индикатор на ЭЛТ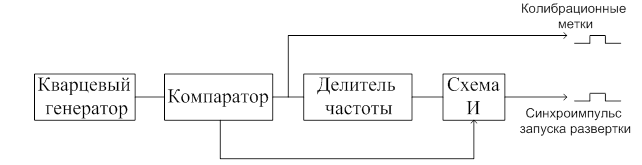 Рис. 2.13 Формирование колибрационных меток и синхроимпульсов
Рис. 2.13 Формирование колибрационных меток и синхроимпульсов . (2.26)
. (2.26) :
:
 . (2.28)
. (2.28) 
 . В результате временное рассогласование
. В результате временное рассогласование  воздействует на систему с передаточной функцией
воздействует на систему с передаточной функцией  .
. . (2.30)
. (2.30) .
. . (2.31)
. (2.31) , (2.32)
, (2.32)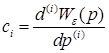 в точке p =0.
в точке p =0. , (2.33)
, (2.33) ) системы АСД в установившимся режиме имеет минимум при некотором значении K = K ОПТ. (рис.2.17).
) системы АСД в установившимся режиме имеет минимум при некотором значении K = K ОПТ. (рис.2.17).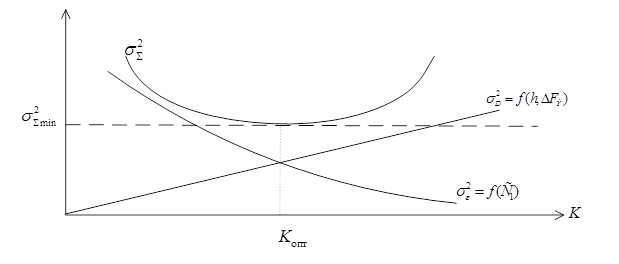 Рис. 2.17 Зависимость ошибки определения дальности от
Рис. 2.17 Зависимость ошибки определения дальности от