
|
|
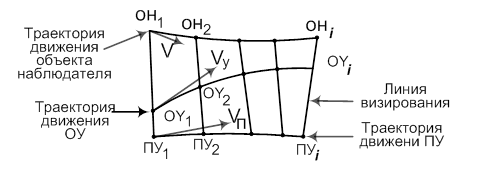
Кинематика телеуправления. Методы телеуправления (метод параллельного сближения, метод накрытия и метод пропорциональной навигации.Кинематика телеуправления Траектория движения центра масс ЛА как математической точки, на которую наложены определённые кинематические связи, называется кинематической траекторией. Кинематическая траектория не учитывает инерционности ЛА и его динамических свойств, то есть не учитывает переходных процессов при управлении. Динамическая траектория определяется путём решения уравнений динамики твёрдого тела, описанных в разделе 3.1, и показывает измерение траектории под влиянием переходных процессов. Под воздействием случайных помех и возмущений фактическая траектория отличается и от динамической, и от кинематической. Однако это отличие обычно невелико и определяется величиной динамических и случайных ошибок, уменьшение которых является главной задачей проектирования систем радиоуправления. Величина этих ошибок зависит также от характера кинематических связей, которая определяет вид кинематической траектории, в частности, потому, что вид траектории определяет величину требуемых поперечных перегрузок. Простейшей кинематической связью, накладываемой на управляемый ЛА при наведении по радиолучу, является требование, чтобы объект управления (ОУ) в течении всего времени полёта находился на линии визирования (линии, проходящеё через пункт управления (ПУ) и объект наблюдения (ОН) – цель). Такой метод называется методом накрытия (рисунок 3.6). V П, V H и VУ - скорости движения пункта управления, объекта наблюдения и объекта управления. Рассмотрим подробнее траектории рисунок 3.6 (б) при неподвижном пункте управления.
а)
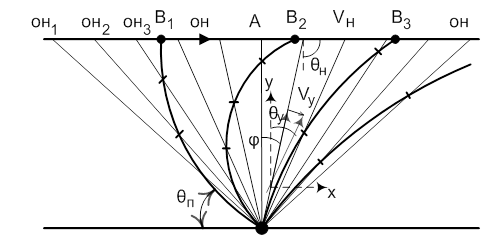
б)Vп=0 Рисунок 3.6- Метод накрытия
Из рисунка 3.6 (б) видно, что наибольшая кривизна траектории при встречных курсах (угол пуска
где Для объекта наблюдения (ОН) справедливы аналогичные уравнения
Кинематические связи при движении ОУ по методу накрытия сводятся к следующему:
Уравнение рассогласования имеет вид
где В конце движения ОУ даже при малом
где Используя (3.11, 3.12, 3.13) запишем уравнение кинематической траектории
где Зная уравнение движения ОН и ОУ, можно найти зависимость кривизны траектории от начальных условий: отношения
Максимальная перегрузка при наиболее неблагоприятных условиях
где Например: Для сверхзвукового ОУ с При уменьшении Маневрирование ОН с поперечным ускорением
Для уменьшения поперечных перегрузок траекторию движения ОУ стараются спрямить путём наведения в упреждающую точку. Метод наведения в упреждающую точку называется методом параллельного сближения. При наведении методом параллельного сближения ОУ движется так, что линия, соединяющая ОН и ОУ, перемещается параллельно линии визирования в момент пуска ОУ (рисунок 3.7).
Рисунок 3.7 - Метод параллельного сближения Недостатком этого метода является тот факт, что при наведении в упреждающую точку ОУ, ОН и ПУ теперь не находятся на одной прямой. В связи с этим антенна ПУ должна иметь два луча: один – управляющий, для передачи команд управления на ОУ, другой – визированная цель для определения характеристик ОН. Кинематическая связь, накладываемая на движение ОУ при параллельном сближении, представляется в виде
Роль сравнивающего устройства системы автоматического управления должен выполнять прибор, определяющий параметры рассогласования Как следует из построения (рисунок 3.7), при прямолинейном движении ОН кривизна траектории движения ОУ при параллельном сближении равен нулю. Маневрирование ОН приводит к искривлению траектории, причём поперечные перегрузки ОУ оказываются равными перегрузкам ОН
Поперечные ускорения создаются системой управления под воздействии на неё сигналов, пропорциональных параметру рассогласования
Из (3.22) следует, что идеальное наведение методом параллельного сближения (чтобы При конечном значении При наведении методом пропорциональной навигации степень приближения траектории движения ОУ к траектории параллельного сближения зависит от навигационной постоянной (рисунок 3.8)
точки
Рисунок 3.8- Метод пропорциональной навигации
Для метода пропорциональной навигации, в отличие от метода накрытия характерным является то, что вектор скорости OY в каждой точке визирования поворачивается на больший угол, чем линия визирования. Можно показать, что кривая движения вдогон (траектория накрытия) соответствует навигационной постоянной Существуют и другие – комбинированные методы наведения: на первом отрезке ОУ управляется по методу накрытия, на завершающем участке – самонаведение по методу параллельного сближения и др.
  Что делает отдел по эксплуатации и сопровождению ИС? Отвечает за сохранность данных (расписания копирования, копирование и пр.)...  ЧТО ПРОИСХОДИТ, КОГДА МЫ ССОРИМСЯ Не понимая различий, существующих между мужчинами и женщинами, очень легко довести дело до ссоры...  ЧТО ПРОИСХОДИТ ВО ВЗРОСЛОЙ ЖИЗНИ? Если вы все еще «неправильно» связаны с матерью, вы избегаете отделения и независимого взрослого существования...  Что делать, если нет взаимности? А теперь спустимся с небес на землю. Приземлились? Продолжаем разговор... Не нашли то, что искали? Воспользуйтесь поиском гугл на сайте:
|
 <
<  ) имеет место в конце полёта. При наведении методом накрытия большая кривизна траектории возможна даже при прямолинейном движении ОН. Исследования показывают, что при малом превышении скорости ОУ над скоростью ОН попадание вообще осуществимо только на встречных курсах при достаточно малых углах запуска. Аналитические выражения, связывающие движение ЛА и ОН (при неподвижном ПУ), могут быть получены из кинематических уравнений, описывающих поступательное движение ОУ по радиолучу и вращательное вместе с лучом.
) имеет место в конце полёта. При наведении методом накрытия большая кривизна траектории возможна даже при прямолинейном движении ОН. Исследования показывают, что при малом превышении скорости ОУ над скоростью ОН попадание вообще осуществимо только на встречных курсах при достаточно малых углах запуска. Аналитические выражения, связывающие движение ЛА и ОН (при неподвижном ПУ), могут быть получены из кинематических уравнений, описывающих поступательное движение ОУ по радиолучу и вращательное вместе с лучом. (3.11)
(3.11) и
и  - радиальная и тангенциальная составляющие вектора скорости в полярной системе координат с началом в точке расположения ПУ;
- радиальная и тангенциальная составляющие вектора скорости в полярной системе координат с началом в точке расположения ПУ;  - угол наклона траектории,
- угол наклона траектории,  - угол визирования.
- угол визирования. (3.12)
(3.12) (3.13)
(3.13) , (3.14)
, (3.14) - угловой параметр рассогласования, играющий роль сигнала ошибки для замкнутого контура наведения.
- угловой параметр рассогласования, играющий роль сигнала ошибки для замкнутого контура наведения. линейное отклонение может оказаться недопустимо большим; поэтому целесообразно (3.14) записать в виде
линейное отклонение может оказаться недопустимо большим; поэтому целесообразно (3.14) записать в виде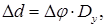 (3.15)
(3.15) - расстояние от ПУ до ОУ,
- расстояние от ПУ до ОУ,  - линейный параметр рассогласования.
- линейный параметр рассогласования. (3.16)
(3.16) - расстояние от ОУ до ОН.
- расстояние от ОУ до ОН. и угла пуска
и угла пуска  . Тогда поперечное ускорение равно
. Тогда поперечное ускорение равно . (3.17)
. (3.17) и при
и при  составляет величину
составляет величину (3.18)
(3.18) - параметр траектории (на рисунке 3.6 (б) этот параметр равен высоте полёта ОН - отрезку ОА).
- параметр траектории (на рисунке 3.6 (б) этот параметр равен высоте полёта ОН - отрезку ОА). перегрузка
перегрузка  достигается при наведении на объект, движущийся со скоростью
достигается при наведении на объект, движущийся со скоростью  по прямой с
по прямой с  при угле пуска
при угле пуска  .
. перегрузка быстро увеличивается, что ограничивает применение метода накрытия.
перегрузка быстро увеличивается, что ограничивает применение метода накрытия. увеличивает требуемое поперечное ускорение ОУ в соответствии с приближенным соотношением
увеличивает требуемое поперечное ускорение ОУ в соответствии с приближенным соотношением . (3.19)
. (3.19)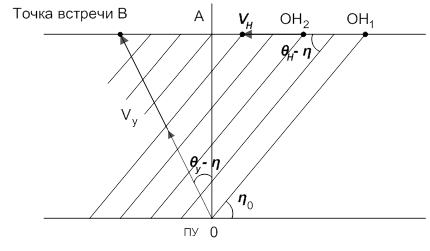
 (3.20)
(3.20) или
или  по измеренным на ПУ фактическим координатам ОН и ОУ, а также по углу
по измеренным на ПУ фактическим координатам ОН и ОУ, а также по углу  , который в момент пуска совпадает с углом визирования цели.
, который в момент пуска совпадает с углом визирования цели. (3.21)
(3.21) . (3.22)
. (3.22) ) нереально, так как это условие при конечных значениях
) нереально, так как это условие при конечных значениях  требует бесконечно большого коэффициента передачи по ускорению
требует бесконечно большого коэффициента передачи по ускорению  (коэффициент усиления системы управления).
(коэффициент усиления системы управления). (3.23)
(3.23) - точки встречи ОУ и ОН для траектории параллельного сближения, пропорциональной навигации и накрытия (вдогон).
- точки встречи ОУ и ОН для траектории параллельного сближения, пропорциональной навигации и накрытия (вдогон).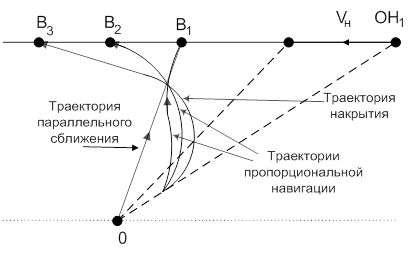
 , а траектория параллельного сближения
, а траектория параллельного сближения  . При
. При  поперечное ускорение при наведении методом пропорциональной навигации на маневрирующий ОН незначительно превышает ускорение ОН, а переход с траектории накрытия происходит в начале движения ОУ и рассматривается как нестационарный процесс в контуре управления.
поперечное ускорение при наведении методом пропорциональной навигации на маневрирующий ОН незначительно превышает ускорение ОН, а переход с траектории накрытия происходит в начале движения ОУ и рассматривается как нестационарный процесс в контуре управления.