
|
|
УКАЗАНИЯ К ВЫПОЛНЕНИЮ КОНТРОЛЬНОЙ РАБОТЫПри структурном анализе схемы пространственного механизма манипулятора промышленного робота с несколькими степенями свободы в первой задаче каждого варианта следует указать стойку и подвижные звенья, которые можно обозначить арабскими цифрами, установить виды кинематических пар и обозначить все пары римскими цифрами. Число степеней свободы манипулятора определяется по формуле для пространственных механизмов. Под маневренностью m манипулятора понимается его число степеней свободы при неподвижном захвате. Во второй задаче работы рассматриваются планетарные, дифференциальные или замкнутые дифференциальные механизмы. При анализе коробки передач, представляющей собой зубчатый механизм с несколькими степенями свободы, надо составить схемы передачи движения от входного вала к выходному для каждой передачи и определить соответствующие передаточные отношения. Анализ замкнутого дифференциального механизма целесообразно начать с выяснения его структуры. Следует выделить в механизме дифференциальную часть (сателлит, водило, центральные колеса) и замыкающую зубчатую передачу. Затем составляется соотношение, связывающее скорости звеньев дифференциальной части механизма и соотношение для скорости замыкающей передачи. Из этих соотношений можно получить выражение для искомого передаточного отношения замкнутого дифференциального механизма. При графическом определении передаточного отношения используется план скоростей зубчатого механизма. Для определения передаточного отношения дифференциального механизма с двумя сблокированными звеньями также следует воспользоваться соотношениями, связывающими скорости его звеньев. В третьей задаче работы решается задача проектирования рычажного механизма по заданным положениям его звеньев. При решении применяются графические или графо-аналитические методы, изложенные в учебниках. Условия задач, пояснения к решениям, необходимые уравнения и расчеты приводятся в пояснительной записке. В ней указывается и литература, использованная при выполнении работы, в том числе методические указания и задания. Все графические построения выполняются на стандартных листах чертежной или миллиметровой бумаги с соблюдением правил машиностроительного черчения и вклеиваются в записку. Выполненная контрольная работа должна быть выслана в институт на рецензирование. Работа, оформленная небрежно и без соблюдения предъявляемых к ней требований, не рассматривается и не зачитывается. Прошедшие рецензирование и зачтенные контрольные работы студент обязан предъявить на экзамен для собеседования. Без контрольных работ студент к экзаменам не допускается.
Задача 4. Задача выбирается в соответствии с вашим вариантом. В этой задаче проводится структурный анализ. Решение задач на эту тему заключается в определении степени подвижности механизма и разбивке механизма на группы Ассура, а именно: 1. Определяется степень подвижности механизма. 2. Подсчитывается количество кинематических пар. 3. Механизм разбивается на группы Ассура. 4. Записывается структурная формула, соответствующая механизму при входном звене.
Рисунок 3.1 - Структурные схемы манипуляторов промышленных роботов
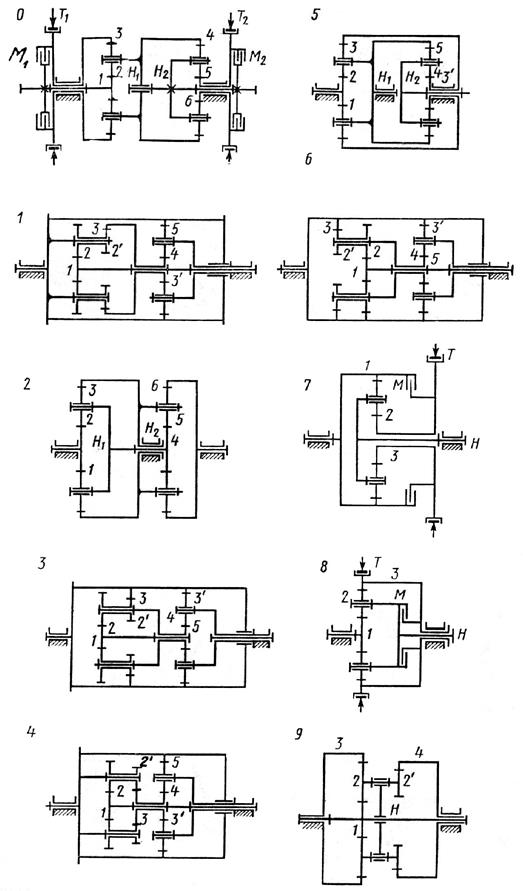
Рисунок 3.2 - К определению передаточных отношений в зубчатых механизмах
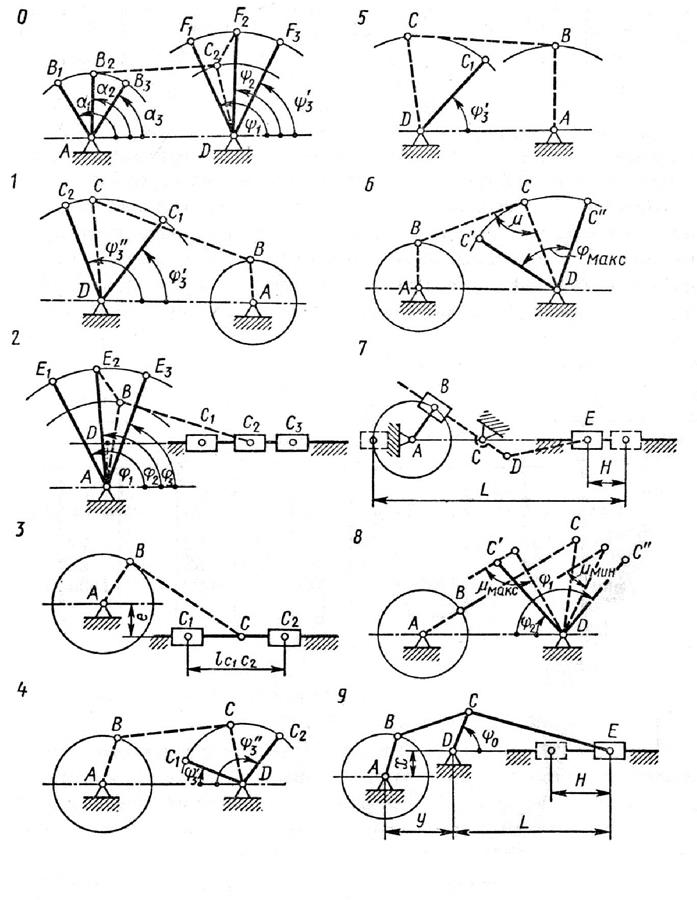
Рисунок 3.3 - К проектированию схем рычажных механизмов по положениям звеньев
3.2 Контрольная работа для студентов технологических специальностей ОБЩИЕ УКАЗАНИЯ В зависимости от специальности студенты заочного отделения выполняют одну или две контрольные работы, которые заключаются в решении некоторых или всех задач из пяти, приведенных ниже. Объём и содержание контрольных работ доводятся до сведения студентов на установочной лекции. В каждой задаче номер задания соответствует предпоследней цифре шифра студента, а числовой вариант – последней цифре.
ЗАДАЧА 1 В этой задаче цифровые значения отсутствуют, поэтому здесь нужно выбирать только номер задания, который соответствует предпоследней цифре шифра. Решение задачи заключается в структурном анализе плоской кинематической цепи с низшими парами. Здесь сначала необходимо определить степень подвижности по формуле П.Л. Чебышева и затем разбить эту цепь на структурные группы. Сначала вычерчиваются механизмы первого класса (входные звенья), количество которых соответствует степени подвижности этой кинематической цепи. Все звенья кинематической цепи необходимо пронумеровать, причем, все стойки лучше обозначить цифрой 0. При вычерчивании механизмов первого класса и групп Асура необходимо все звенья вычерчивать в соответствии с их расположением в схеме. При этом нужно сохранять нумерацию звеньев и буквенные обозначения кинематических пар.
ЗАДАЧА 2 Эта задача состоит из двух частей: первая часть – кинематический анализ. Первая часть выполняется по заданным условиям задачи и параметрам, приведенным в таблице. Вторая часть выполняется по механизму, спроектированному в первой части задачи. Для этого необходимо провести окружность из центра А радиусом АВ, построить одно из крайних (мертвых) положений механизма и, приняв его за нулевое, построить 12 положений механизма через каждые
Рисунок 3.4
Задача 2 Задание 0. Спроектировать схему кривошипно-ползунного механизма по трём заданным положениям шатуна Определить длину кривошипа
Таблица 3.21
Задание 1. Спроектировать схему механизма шарнирного четырёхзвенника (рис. 3.4,1) по трём положениям кривошипа АВ и трём положениям плоскости коромысла СD. Положение кривошипа задаются углами
Таблица 3.22
Задание 2. Спроектировать схему кривошипно-ползунного механизма (рис. 3.4,2) по трём заданным положениям плоскости кривошипа АВ и трем положениям ползуна С, т. е. определить длины звеньев Задана длина отрезка
Таблица 3.23
Задание 3. Спроектировать схему механизма шарнирного четырехзвенника (рис. 3.4,3), у которого коромысло СД в крайних положениях наклонено к стойке АД под углами
Таблица 3.24
Задание 4. Спроектировать схему кривошипно – ползунного механизма (рис. 3.4,4), по заданному коэффициенту изменения средней скорости ползуна К, ходу ползуна
Таблица 3.25
Задание 5. Спроектировать схему механизма шарнирного четырехзвенника по трём заданным положениям шатуна
Таблица 3.26
Задание 6. Спроектировать схему механизма шарнирного четырехзвенника (рис. 3.4,6) по заданному коэффициенту изменяя средней скорости коромысла СД, равному К. Заданы размеры стойки и коромысла
Таблица 3.27
Задание 7. Для механизма шарнирного четырехзвенника (рис. 3.4,7) определить аналитически максимальный угол размаха
Таблица 3.28
Задание 8. Спроектировать схему кулисного механизма (рис. 3.4,8) по заданному коэффициенту изменения средней скорости кулисы, равному К, и длине строки
Таблица 3.29
Задание 9. Спроектировать схему механизма шарнирного четырехзвенника (рис. 3.4,9) по заданному коэффициенту изменения средней скорости коромысла СД, равному К=1, длине коромысла
Таблица 3.30
ЗАДАЧА 3 Провести кинематическое исследование сложного зубчатого механизма аналитическим и графическим методами. Недостающие количества зубьев колес определить из условия соосности, считая, что все зубчатые колеса механизма имеют один и тот же модуль и угол зацепления. По результатам аналитического и графического исследований вычислить ошибку. (В таблицах: Z – количество зубьев колес, n – частота вращения звеньев в об/мин.)
К заданию 0
К заданию 1
К заданию 2
К заданию 3
К заданию 4
К заданию 5
К заданию 6
К заданию 7
К заданию 8
К заданию 9
©2015- 2026 zdamsam.ru Размещенные материалы защищены законодательством РФ.
|

 поворота кривошипа. Нумерацию положений точки В производить в направлении, противоположном ходу часовой стрелки. Затем для положения, соответствующего числовому варианту (последней цифре шифра), построить план скоростей и план ускорений. Общие данные для всех заданий и вариантов: угловая скорость кривошипа равна 10 Рад/с и направлена против хода часовой стрелки.
поворота кривошипа. Нумерацию положений точки В производить в направлении, противоположном ходу часовой стрелки. Затем для положения, соответствующего числовому варианту (последней цифре шифра), построить план скоростей и план ускорений. Общие данные для всех заданий и вариантов: угловая скорость кривошипа равна 10 Рад/с и направлена против хода часовой стрелки.




 (рис. 3.4,0). Заданы длина шатуна
(рис. 3.4,0). Заданы длина шатуна  расстояние между последовательными положениями ползуна
расстояние между последовательными положениями ползуна 
 и углы между шатуном и линией движения ползуна
и углы между шатуном и линией движения ползуна  и
и  (табл. 3.21)
(табл. 3.21) и смещение
и смещение 






 , а положения коромысла – в виде трёх последовательных положений прямой DF (углы
, а положения коромысла – в виде трёх последовательных положений прямой DF (углы  ), принадлежащей этой плоскости. Даны размеры
), принадлежащей этой плоскости. Даны размеры  . (табл. 3.22) Определить длины шатуна и коромысла
. (табл. 3.22) Определить длины шатуна и коромысла  и
и  , а также угол CDF.
, а также угол CDF.







 ,
,  ), принадлежащей этой плоскости, а положения ползуна – эксцентриситетом
), принадлежащей этой плоскости, а положения ползуна – эксцентриситетом  и расстояниями
и расстояниями  ,
,  и
и  .
. . (табл. 3.23)
. (табл. 3.23)







 и
и  . Длины стойки и коромысла равны
. Длины стойки и коромысла равны  .(табл. 3.24). Определить длины кривошипа и шатуна
.(табл. 3.24). Определить длины кривошипа и шатуна  и
и  .
.



 и смещению направляющей е. (табл. 3.25). Определить длину кривошипа и шатуна
и смещению направляющей е. (табл. 3.25). Определить длину кривошипа и шатуна 

 ,
,  ,
,  ,
,  ,
,  ,
,  и углами
и углами  и
и  . (табл. 3.26). Определите размеры кривошипа
. (табл. 3.26). Определите размеры кривошипа  коромысла
коромысла 




 (табл. 3.27). Определить длину кривошипа
(табл. 3.27). Определить длину кривошипа  коромысла СД, если длины звеньев
коромысла СД, если длины звеньев  и
и 
 (табл. 3.29). Определить длину кривошипа
(табл. 3.29). Определить длину кривошипа 


























